Touch Test Unsafe to perform due to Bad Hand-Eye Calibration (Dataset with only Translations)
Problem
The hand-eye calibration results are bad, and it is unsafe to perform the touch test.
Hand-Eye Transform |
Hand-Eye Residuals |
Projection Verification |
Touch Test |
|---|---|---|---|
Bad |
Bad |
Bad |
Unsafe |
Example of bad hand-eye calibration results
The Hand-Eye Transformation Matrix does not look correct because several of its values differ from the physical measurements by extremely large amounts that are not reasonable for this setup.
0.999 |
-0.005 |
0.003 |
6041.859 |
0.005 |
0.999 |
0.024 |
4033.240 |
-0.003 |
-0.024 |
1.000 |
590.926 |
0 |
0 |
0 |
1 |
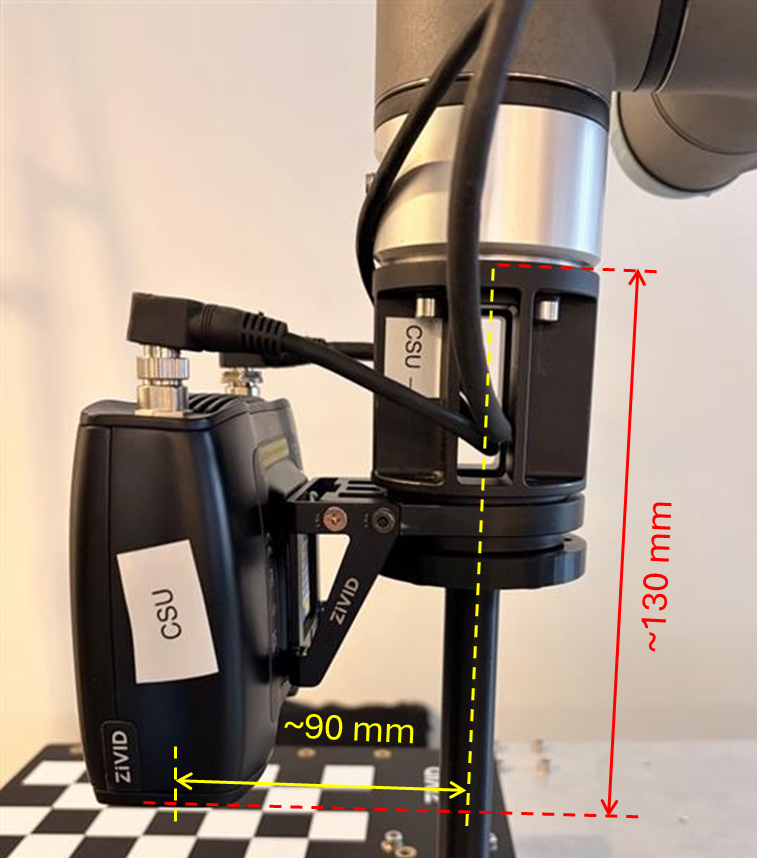
The value 590.926 should be approximately 130 mm, and the value 4033.240 should be roughly 90 mm. At this stage we ignore the sign (+/-), because it depends on the coordinate-system definitions; we focus only on the distances.
The calibration residuals are also noticeably larger than expected, roughly an order of magnitude higher.
N (Poses) |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|
7 |
0.033 |
0.108 |
2.623 |
5.001 |
For smaller robots, we expect the residuals to in the sub-millimeter range, while for larger robots, the residuals can be in the millimeter range. As for the rotational component of the residuals, we expect them to be in the sub-degree range.
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
0.031 |
1.189 |
2 |
0.020 |
4.366 |
3 |
0.108 |
5.001 |
4 |
0.022 |
1.581 |
5 |
0.028 |
0.765 |
6 |
0.018 |
1.977 |
7 |
0.007 |
3.482 |
Verification by Projection technically succeeds, but the resulting error is still too large to be acceptable. One should be very critical of projection verification, as the projection error may seem acceptable even if the hand-eye calibration is incorrect.
Such results strongly suggest that the hand-eye calibration is not correct, and that the touch test will fail if attempted.
Potential Cause
Only translational movements have been made between the robot poses in the dataset.
This is insufficient for hand-eye calibration because the solver requires rotational motion to uniquely determine the camera’s orientation relative to the robot. Without rotations, the problem becomes under-constrained, leading to unstable or incorrect hand-eye calibration results, large residuals, failed projection verification, and an unsafe touch test.
Potential Solution
Ensure to have both translational and rotational movements between robot poses in the dataset.
Note: Check How to get Good Dataset for Hand-Eye Calibration.
Re-run the hand-eye calibration (using the corrected dataset).
Verify the hand-eye calibration results (transform, residuals, projection).
Run the touch test (if the hand-eye calibration results are good).
Reproducing the issue (only translations in the dataset)
Good Dataset
A hand-eye calibration was successfully performed using the dataset shown in the images below.

The calibration resulted in the following results:
Hand-Eye Transformation Matrix 0.9991385
-0.00262377
0.04141687
-55.73573
0.001416378
0.9995739
0.02915465
-91.3017
-0.04147572
-0.02907087
0.9987165
129.1951
0
0
0
1
N (Poses) |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|
14 |
0.028 |
0.068 |
0.133 |
0.278 |
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
0.030 |
0.149 |
2 |
0.039 |
0.278 |
3 |
0.021 |
0.065 |
4 |
0.037 |
0.138 |
5 |
0.013 |
0.272 |
6 |
0.014 |
0.079 |
7 |
0.018 |
0.133 |
8 |
0.013 |
0.075 |
9 |
0.038 |
0.088 |
10 |
0.015 |
0.061 |
11 |
0.026 |
0.179 |
12 |
0.036 |
0.065 |
13 |
0.068 |
0.209 |
14 |
0.023 |
0.066 |
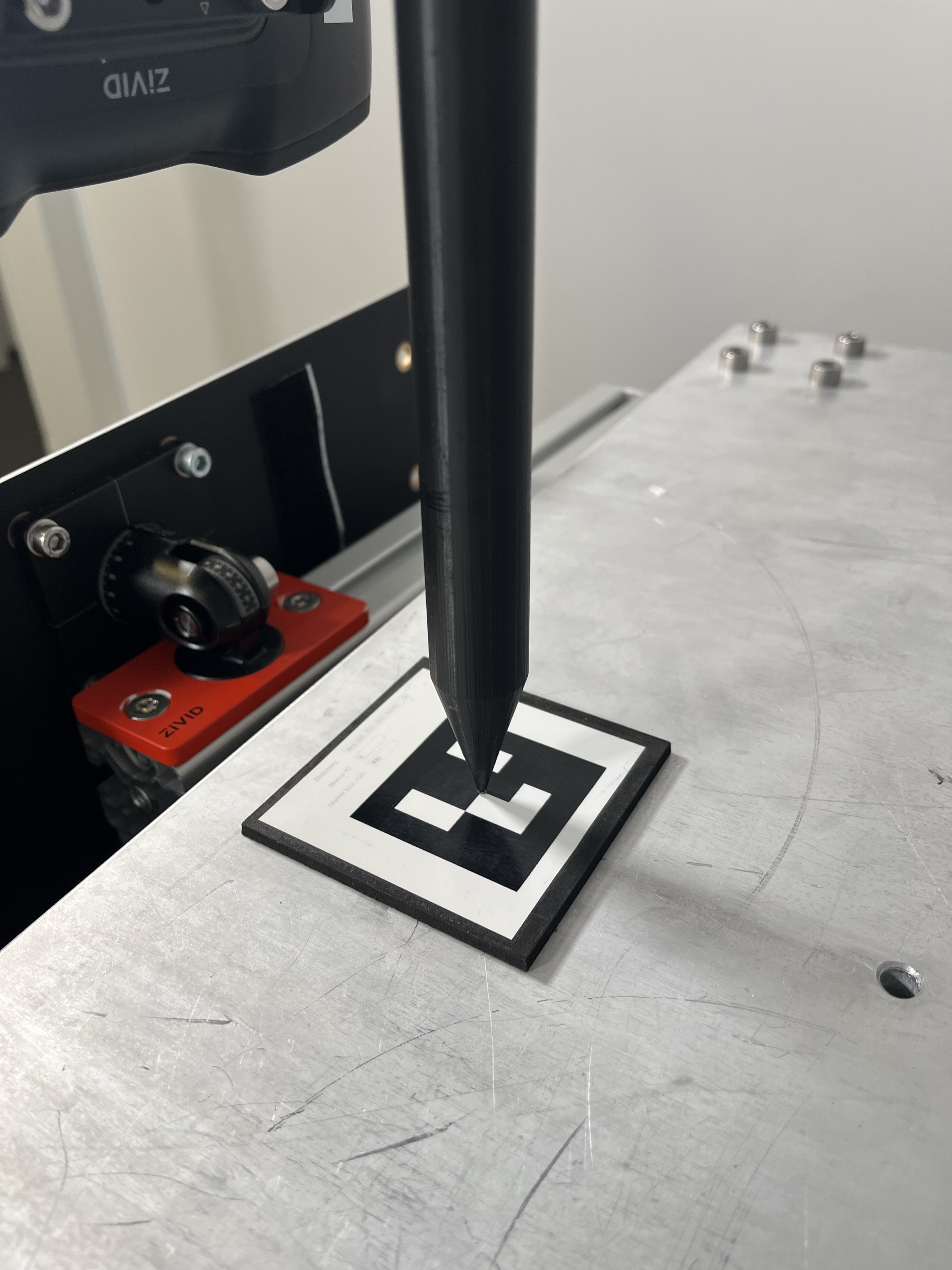
The Hand-Eye calibration was verified with a touch test.

The touch test was successful, which confirms that the hand-eye calibration is correct and accurate.
Bad Dataset (dataset with no rotations, only translations)
A hand-eye calibration was performed using the dataset shown in the image below, which contains only translations and no rotations.
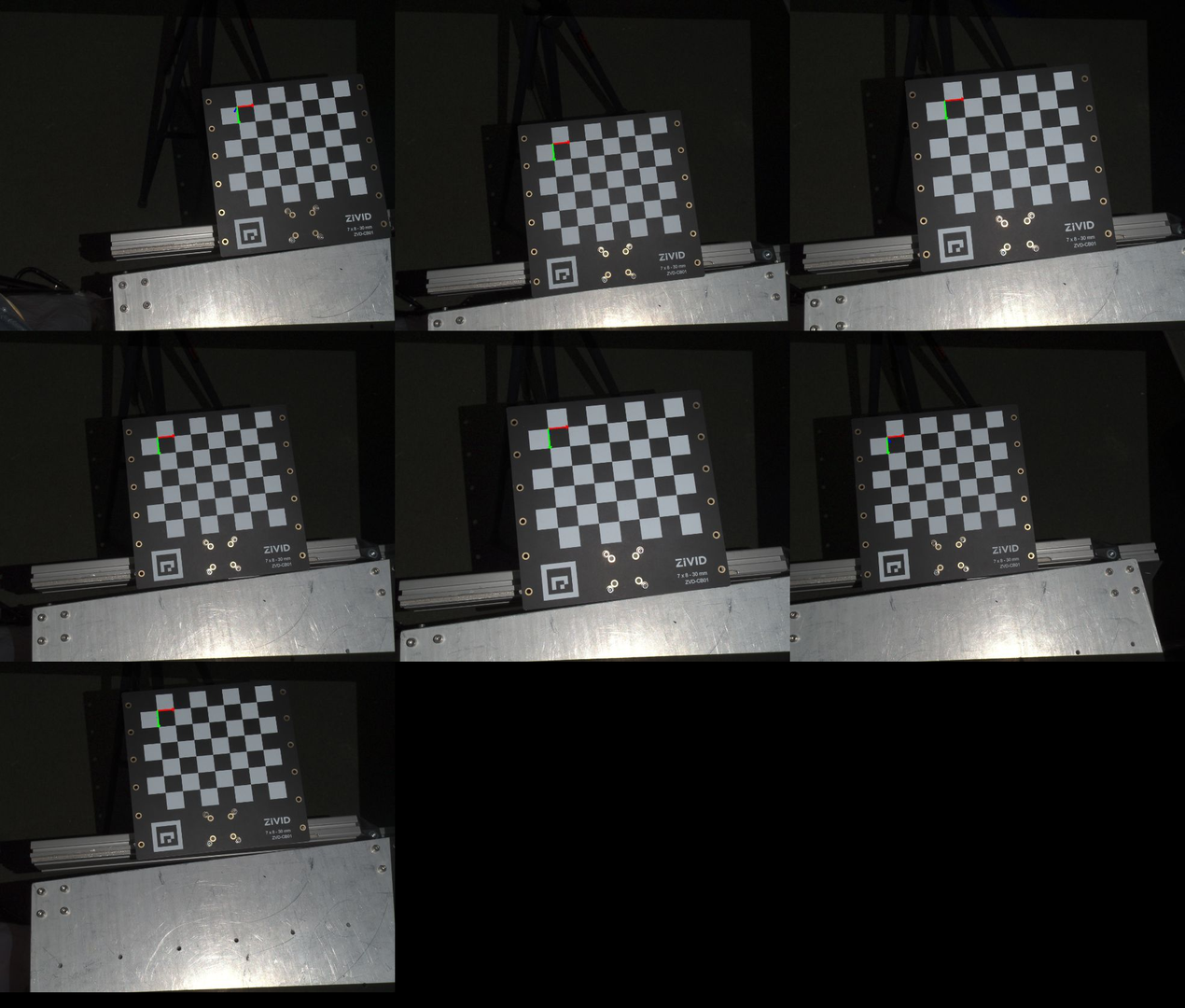
The calibration resulted in the following results:
Hand-Eye Transformation Matrix 0.999
-0.005
0.003
6041.859
0.005
0.999
0.024
4033.240
-0.003
-0.024
1.000
590.926
0
0
0
1
N (Poses) |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|
7 |
0.033 |
0.108 |
2.623 |
5.001 |
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
0.031 |
1.189 |
2 |
0.020 |
4.366 |
3 |
0.108 |
5.001 |
4 |
0.022 |
1.581 |
5 |
0.028 |
0.765 |
6 |
0.018 |
1.977 |
7 |
0.007 |
3.482 |
Verification by Projection technically succeeded, but the resulting error was still too large to be acceptable. One should be very critical of projection verification, as the projection error may seem acceptable even if the hand-eye calibration is incorrect.
Such results strongly suggest that the hand-eye calibration is not correct, and that the touch test would fail if attempted.
Comparisons
The results between hand-eye transformation matrices (translation values) and hand-eye calibration residuals are compared in the tables below.
Translation Values in Hand-Eye Transformation Matrix Dataset
X (mm)
Y (mm)
Z (mm)
Good
-55.73573
-91.3017
129.1951
Bad (only translations)
6041.859
4033.240
590.926
Δ (Good - Bad)
-6097.595
-4124.542
-461.731
Dataset |
N |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|---|
Good |
14 |
0.028 |
0.068 |
0.133 |
0.278 |
Bad (only translations) |
7 |
0.033 |
0.108 |
2.623 |
5.001 |