Unsatisfactory Hand-Eye Calibration Results (Manual Robot Pose Typos)
Problem
The hand-eye calibration results are unsatisfactory (bad or marginal), looking like one of the following combinations:
Hand-Eye Transform |
Hand-Eye Residuals |
Projection Verification |
Touch Test |
|---|---|---|---|
Bad |
Bad |
Bad |
Unsafe |
Reasonable |
Bad |
Bad |
Bad |
Reasonable |
Marginal |
Bad |
Bad |
Reasonable |
Good |
Poor |
Marginal |
Example of bad hand-eye calibration results
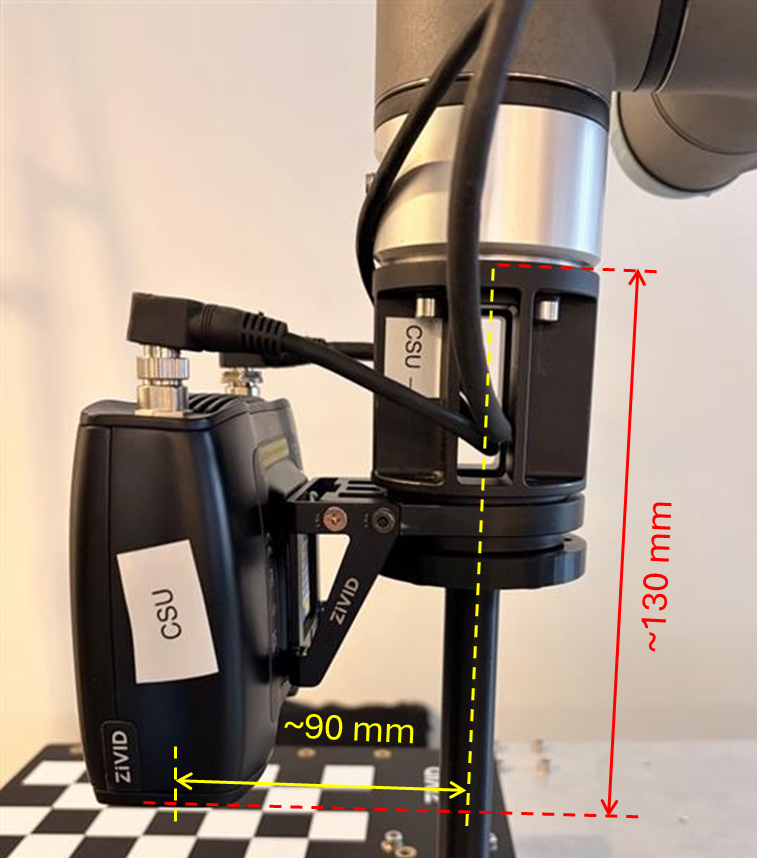
The Hand-Eye Transformation Matrix does not look correct because several of its values differ from the physical measurements by extremely large amounts that are not reasonable for this setup.
0.609 |
0.177 |
0.773 |
-467.320 |
-0.109 |
0.984 |
-0.140 |
17.581 |
-0.785 |
0.001 |
0.619 |
794.894 |
0 |
0 |
0 |
1 |
The value 794.894 should be approximately 130 mm, and the value 17.581 should be roughly 90 mm. At this stage we ignore the sign (+/-), because it depends on the coordinate-system definitions; we focus only on the distances.
The calibration residuals are also significantly larger than expected, a couple of orders of magnitude higher.
N (Poses) |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|
11 |
2.855 |
10.677 |
102.330 |
405.720 |
For smaller robots, we expect the residuals to in the sub-millimeter range, while for larger robots, the residuals can be in the millimeter range. As for the rotational component of the residuals, we expect them to be in the sub-degree range.
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
1.685 |
405.720 |
2 |
1.816 |
90.325 |
3 |
0.215 |
74.578 |
4 |
1.901 |
143.061 |
5 |
2.296 |
21.398 |
6 |
10.678 |
94.157 |
7 |
5.541 |
102.133 |
8 |
0.235 |
40.173 |
9 |
3.979 |
48.811 |
10 |
1.894 |
76.962 |
11 |
1.177 |
28.309 |
Verification by Projection fails, which suggest that the hand-eye calibration is not correct, and that the touch test will fail badly.
Example of marginal hand-eye calibration results
The Hand-Eye Transformation Matrix appears reasonable and is consistent with what one would expect from rough manual measurements (see table and image below).
0.999 |
-0.003 |
0.040 |
-54.871 |
0.002 |
0.999 |
0.029 |
-90.920 |
-0.040 |
-0.029 |
0.999 |
128.709 |
0 |
0 |
0 |
1 |
The calibration residuals are within an acceptable range, indicating that the optimization has converged successfully.
N (Poses) |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|
11 |
0.027 |
0.059 |
0.160 |
0.388 |
For smaller robots, we expect the residuals to in the sub-millimeter range, while for larger robots, the residuals can be in the millimeter range. As for the rotational component of the residuals, we expect them to be in the sub-degree range.
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
0.025 |
0.388 |
2 |
0.016 |
0.270 |
3 |
0.021 |
0.098 |
4 |
0.028 |
0.197 |
5 |
0.014 |
0.057 |
6 |
0.056 |
0.154 |
7 |
0.018 |
0.086 |
8 |
0.019 |
0.230 |
9 |
0.031 |
0.074 |
10 |
0.059 |
0.167 |
11 |
0.015 |
0.043 |
Verification by Projection technically succeeds, but the resulting error is still too large to be acceptable. One should be very critical of projection verification, as the projection error may seem acceptable even if the hand-eye calibration is incorrect.
The touch test result is unsatisfactory (bad or marginal).
The tip of the touch test tool pushes on the ArUco marker too much.
The tip of the touch test tool pushes on the ArUco marker a bit.
Potential Cause
Human error (typo) when copying robot poses from the robot controller to the PC.
Typos in robot poses cause the pose-image pairs to become inconsistent, which breaks the geometric assumptions required for hand-eye calibration. Even a small incorrect digit can distort one pose enough to pull the entire optimization toward a wrong solution, resulting in poor residuals, unrealistic transformations, and overall unsatisfactory calibration results.
Potential Solution
If you are manually copying poses from the robot controller to the PC, double-check the values to ensure no typos were made.
Ensure the correct rotation convention is used when converting robot poses from the robot controller into the transformation matrices for Zivid hand-eye calibration.
Repeat the hand-eye calibration using the same dataset.
Verify the hand-eye calibration results (transform, residuals, projection).
Run the touch test (if the hand-eye calibration results are good).
Reproducing the issue (bad hand-eye calibration)
Good Dataset
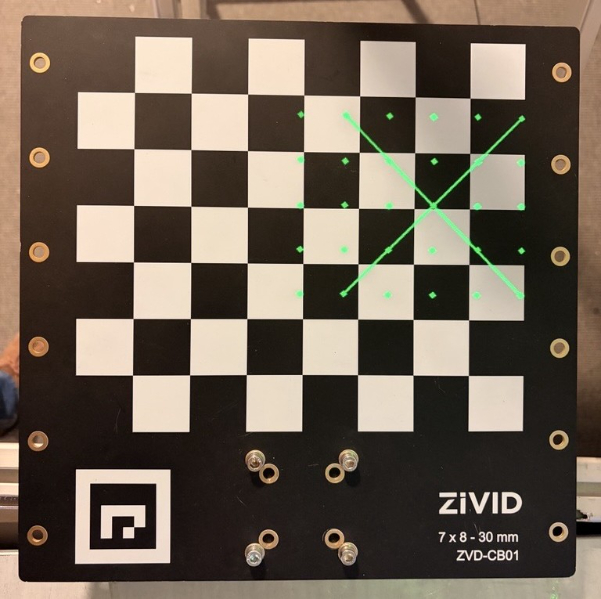
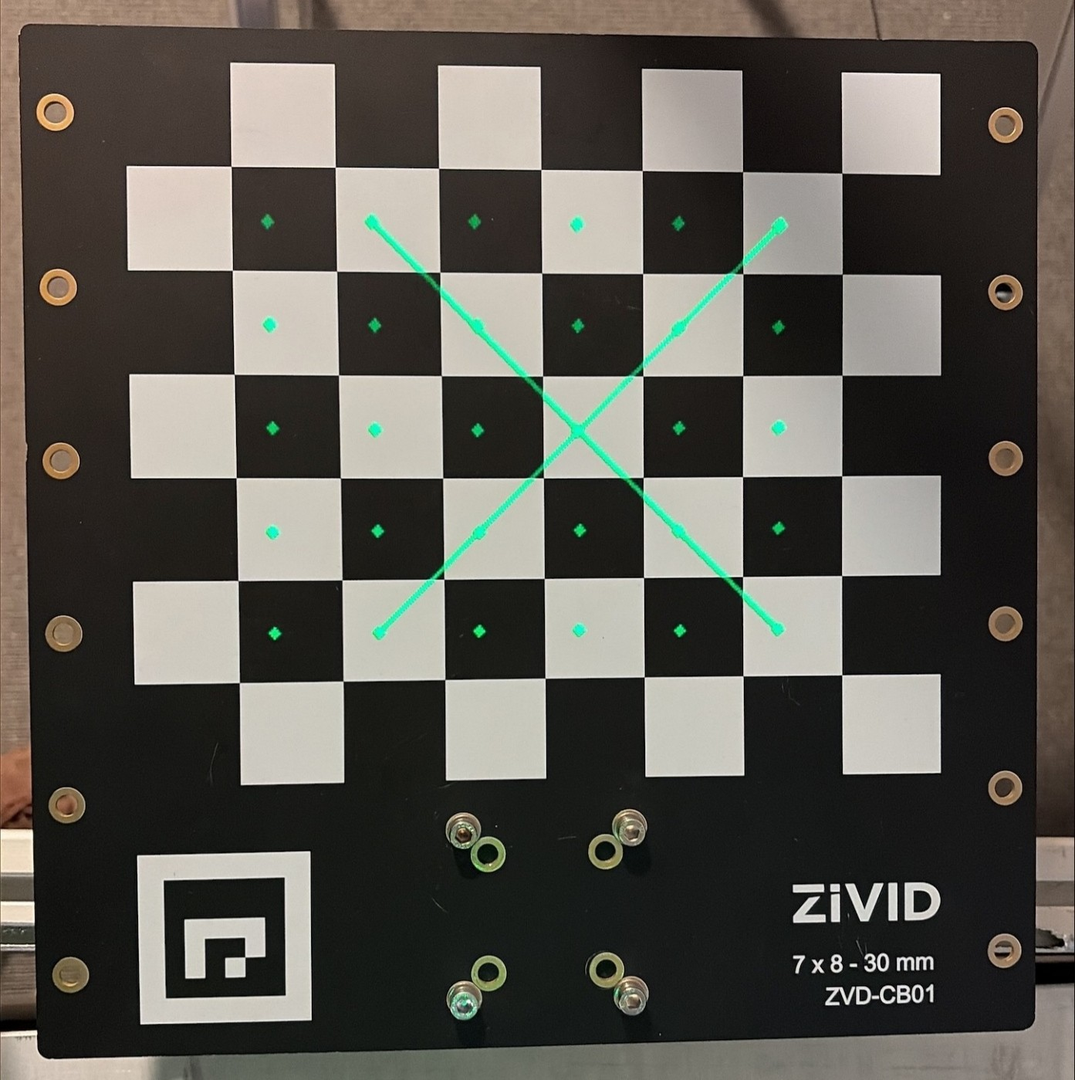
A hand-eye calibration was successfully performed using the dataset shown in the images below.
The calibration resulted in the following results:
0.999 |
-0.002 |
0.041 |
-55.598 |
0.001 |
0.999 |
0.028 |
-90.654 |
-0.041 |
-0.028 |
0.999 |
129.044 |
0 |
0 |
0 |
1 |
N (Poses) |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|
11 |
0.025 |
0.054 |
0.109 |
0.192 |
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
0.025 |
0.388 |
2 |
0.016 |
0.270 |
3 |
0.021 |
0.098 |
4 |
0.028 |
0.197 |
5 |
0.014 |
0.057 |
6 |
0.056 |
0.154 |
7 |
0.018 |
0.086 |
8 |
0.019 |
0.230 |
9 |
0.031 |
0.074 |
10 |
0.059 |
0.167 |
11 |
0.015 |
0.043 |
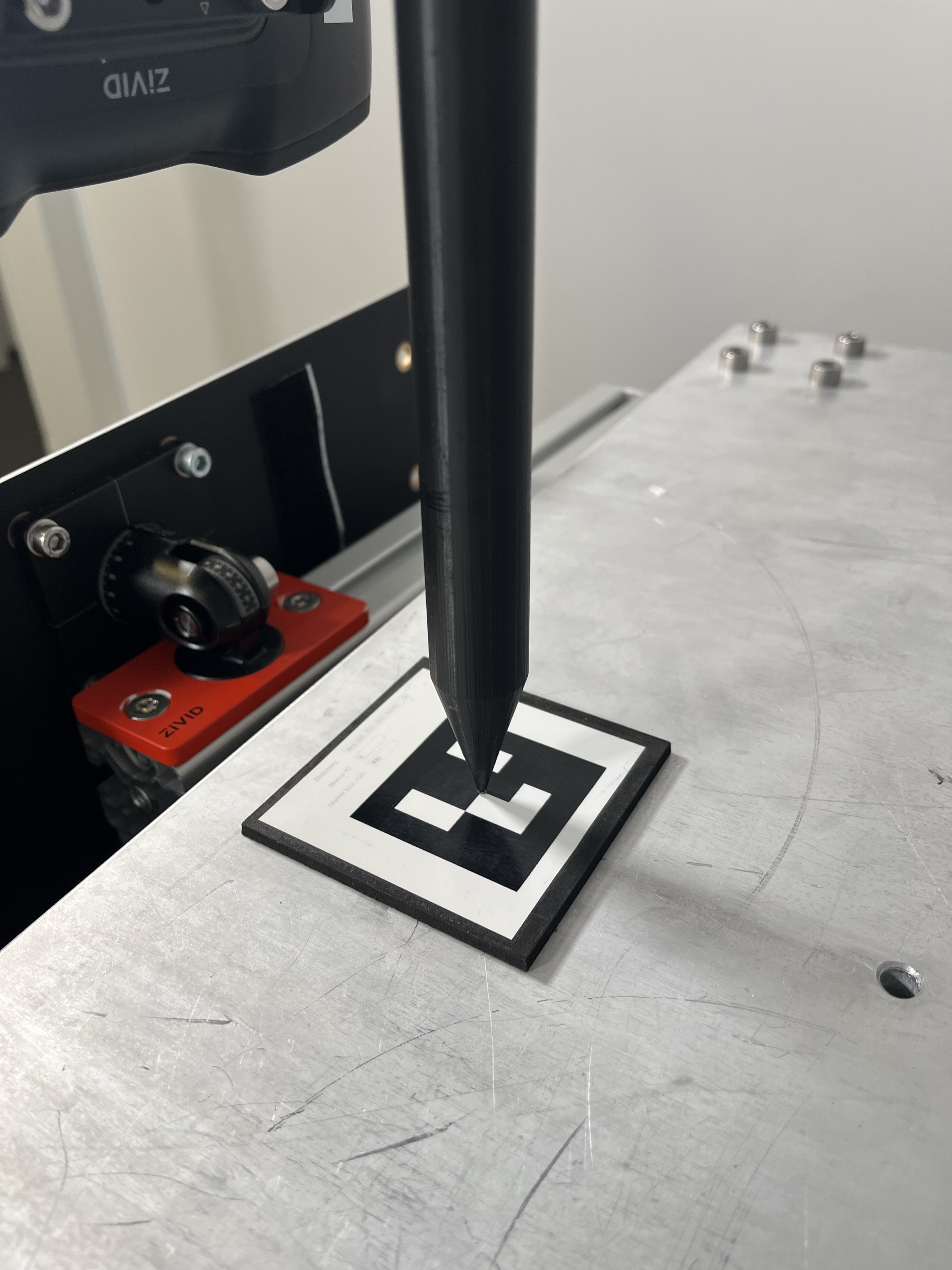
The Hand-Eye calibration was verified with a touch test.

The touch test was successful, which confirms that the hand-eye calibration is correct and accurate.
Bad Dataset (Large Translation Error)
To simulate a human typo during a manual robot pose entry, a large translation error was introduced for one pose in the good dataset. The X value of the translation vector was changed from -742.58 to -142.58 mm (first integer digit: 7 → 1).
The calibration resulted in the following results:
0.609 |
0.177 |
0.773 |
-467.320 |
-0.109 |
0.984 |
-0.140 |
17.581 |
-0.785 |
0.001 |
0.619 |
794.894 |
0 |
0 |
0 |
1 |
N (Poses) |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|
11 |
2.855 |
10.677 |
102.330 |
405.720 |
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
1.685 |
405.720 |
2 |
1.816 |
90.325 |
3 |
0.215 |
74.578 |
4 |
1.901 |
143.061 |
5 |
2.296 |
21.398 |
6 |
10.678 |
94.157 |
7 |
5.541 |
102.133 |
8 |
0.235 |
40.173 |
9 |
3.979 |
48.811 |
10 |
1.894 |
76.962 |
11 |
1.177 |
28.309 |
Verification by Projection failed, which suggests that the hand-eye calibration is not correct, and that the touch test would fail badly. Therefore, the touch test was skipped for safety reasons.
Comparisons
The results between hand-eye calibration matrices (translation values) and hand-eye calibration residuals are compared in the tables below.
Dataset |
X (mm) |
Y (mm) |
Z (mm) |
|---|---|---|---|
Good |
-55.598 |
-90.654 |
129.044 |
Bad (large transl. error) |
-467.320 |
17.581 |
794.894 |
Δ (Good - Bad) |
411.722 |
-108.235 |
-665.850 |
Dataset |
N |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|---|
Good |
11 |
0.025 |
0.054 |
0.109 |
0.192 |
Bad (large transl. error) |
11 |
2.855 |
10.677 |
102.330 |
405.720 |
Reproducing the issue (marginal hand-eye calibration)
Good Dataset
A hand-eye calibration was successfully performed using the dataset shown in the images below.
The calibration resulted in the following results:
0.999 |
-0.002 |
0.041 |
-55.598 |
0.001 |
0.999 |
0.028 |
-90.654 |
-0.041 |
-0.028 |
0.999 |
129.044 |
0 |
0 |
0 |
1 |
N (Poses) |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|
11 |
0.025 |
0.054 |
0.109 |
0.192 |
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
0.025 |
0.388 |
2 |
0.016 |
0.270 |
3 |
0.021 |
0.098 |
4 |
0.028 |
0.197 |
5 |
0.014 |
0.057 |
6 |
0.056 |
0.154 |
7 |
0.018 |
0.086 |
8 |
0.019 |
0.230 |
9 |
0.031 |
0.074 |
10 |
0.059 |
0.167 |
11 |
0.015 |
0.043 |
The Hand-Eye calibration was verified with a touch test.
The touch test was successful, which confirms that the hand-eye calibration is correct and accurate.
Bad Datasets
To simulate a human typo during a manual robot pose entry, the good dataset was modified by introducing an error in three different ways, resulting in three new datasets:
A small angular error (first digit after the “.”) was made for one pose for one of the Roll-Pitch-Yaw angles. The Yaw value was changed from 6.82° to 6.22° (first digit after “.” 8 → 2).
A large angular error (first digit) was made for one pose for one of the Roll-Pitch-Yaw angles. The Yaw value was changed from 6.93° to 3.93° (first integer digit 6 → 3).
A small translational error (first digit after the “.”) was made for one pose for one of translation vector values. The X value was changed from -48.81 to -48.21 (first digit after “.” 8 → 2).
The calibration resulted in the following hand-eye matrices and residuals:
0.999 |
-0.002 |
0.044 |
-57.032 |
0.001 |
1.000 |
0.029 |
-90.899 |
-0.044 |
-0.029 |
0.999 |
129.580 |
0 |
0 |
0 |
1 |
0.999 |
0.005 |
0.047 |
-58.558 |
-0.006 |
1.000 |
0.029 |
-87.455 |
-0.047 |
-0.029 |
0.998 |
131.117 |
0 |
0 |
0 |
1 |
0.999 |
-0.003 |
0.040 |
-54.871 |
0.002 |
1.000 |
0.029 |
-90.920 |
-0.040 |
-0.029 |
0.999 |
128.709 |
0 |
0 |
0 |
1 |
Residuals
Dataset |
N |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|---|
Small Angle Error |
11 |
0.104 |
0.536 |
0.256 |
0.877 |
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
0.536334 |
0.877 |
2 |
0.055345 |
0.431 |
3 |
0.057495 |
0.189 |
4 |
0.064677 |
0.301 |
5 |
0.054738 |
0.115 |
6 |
0.059730 |
0.029 |
7 |
0.070040 |
0.238 |
8 |
0.062262 |
0.119 |
9 |
0.060767 |
0.069 |
10 |
0.060585 |
0.288 |
11 |
0.062108 |
0.160 |
Dataset |
N |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|---|
Large Angle Error |
11 |
0.505 |
2.742 |
0.966 |
4.393 |
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
2.742018 |
4.393 |
2 |
0.280878 |
1.050 |
3 |
0.269892 |
0.750 |
4 |
0.288396 |
1.053 |
5 |
0.291592 |
0.435 |
6 |
0.247856 |
0.691 |
7 |
0.315325 |
0.886 |
8 |
0.278548 |
0.410 |
9 |
0.297165 |
0.382 |
10 |
0.262904 |
0.314 |
11 |
0.285421 |
0.262 |
Dataset |
N |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|---|
Small Translation Error |
11 |
0.027 |
0.059 |
0.160 |
0.388 |
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
0.025433 |
0.388 |
2 |
0.016149 |
0.270 |
3 |
0.021316 |
0.098 |
4 |
0.027773 |
0.197 |
5 |
0.013938 |
0.057 |
6 |
0.056120 |
0.154 |
7 |
0.018387 |
0.086 |
8 |
0.019042 |
0.230 |
9 |
0.031110 |
0.074 |
10 |
0.059334 |
0.167 |
11 |
0.014671 |
0.043 |
Comparisons
The results between hand-eye calibration matrices (translation values) and hand-eye calibration residuals are compared in the tables below.
Dataset |
X (mm) |
Y (mm) |
Z (mm) |
|---|---|---|---|
Good |
-55.598 |
-90.654 |
129.044 |
Bad (Small Angle Error) |
-57.032 |
-90.899 |
129.580 |
Δ (Good - Bad) |
1.434 |
0.244 |
-0.536 |
Dataset |
X (mm) |
Y (mm) |
Z (mm) |
|---|---|---|---|
Good |
-55.598 |
-90.654 |
129.044 |
Bad (Large Angle Error) |
-58.558 |
-87.455 |
131.117 |
Δ (Good - Bad) |
2.960 |
-3.199 |
-2.073 |
Dataset |
X (mm) |
Y (mm) |
Z (mm) |
|---|---|---|---|
Good |
-55.598 |
-90.654 |
129.044 |
Bad (Small Transl. Error) |
-54.871 |
-90.920 |
128.709 |
Δ (Good - Bad) |
-0.727 |
0.265 |
0.335 |
Residuals
Dataset |
N |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|---|
Good |
11 |
0.025 |
0.054 |
0.109 |
0.192 |
Bad (Small Angle Error) |
11 |
0.104 |
0.536 |
0.256 |
0.877 |
Dataset |
N |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|---|
Good |
11 |
0.025 |
0.054 |
0.109 |
0.192 |
Bad (Large Angle Error) |
11 |
0.505 |
2.742 |
0.966 |
4.393 |
Dataset |
N |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|---|
Good |
11 |
0.025 |
0.054 |
0.109 |
0.192 |
Bad (Small Transl. Error) |
11 |
0.027 |
0.059 |
0.160 |
0.388 |
Touch Tests
The tip of the touch test tool does not reach the ArUco marker.
The tip of the touch test tool pushes on the ArUco marker too much.
The tip of the touch test tool lands at the center of the ArUco marker.