Touch Test Unsafe to perform due to Bad Hand-Eye Calibration (Wrong Rotation Convention)
Problem
The hand-eye calibration results are bad, and it is unsafe to perform the touch test.
Hand-Eye Transform |
Hand-Eye Residuals |
Projection Verification |
Touch Test |
|---|---|---|---|
Bad |
Bad |
Bad |
Unsafe |
Example of bad hand-eye calibration results
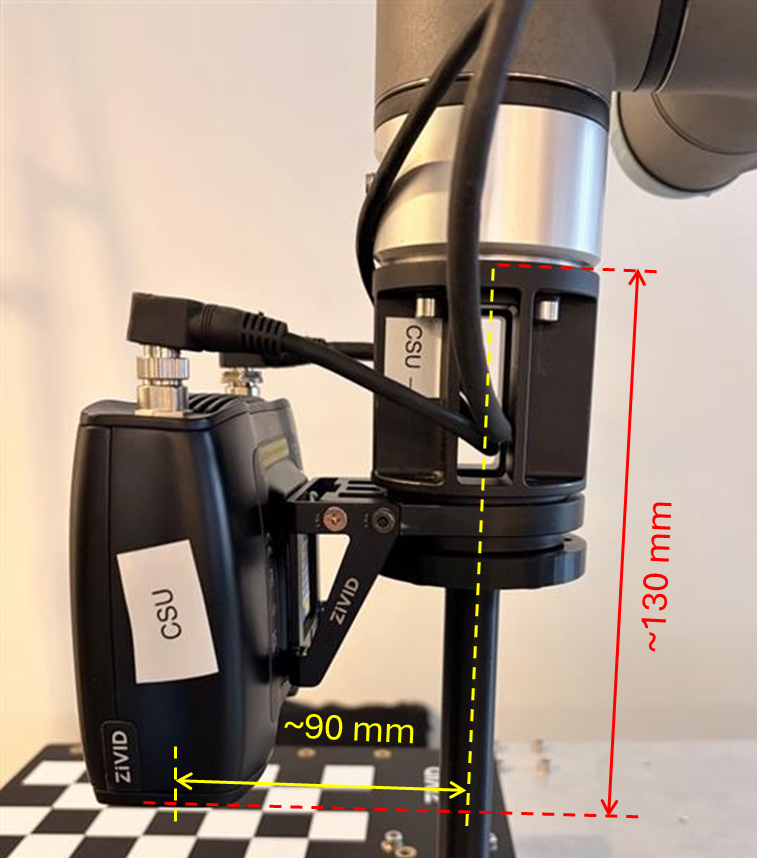
The Hand-Eye Transformation Matrix does not look correct because several of its values differ from the physical measurements by extremely large amounts that are not reasonable for this setup.
-0.402 |
0.908 |
-0.117 |
134.552 |
-0.910 |
-0.411 |
-0.060 |
-440.257 |
-0.102 |
0.082 |
0.991 |
-706.041 |
0 |
0 |
0 |
1 |
The value -706.040 should be approximately 130 mm, and the value -440.256 should be roughly 90 mm. At this stage we ignore the sign (+/-), because it depends on the coordinate-system definitions; we focus only on the distances.
The calibration residuals are also significantly larger than expected, a couple of orders of magnitude higher.
N (Poses) |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|
14 |
10.764 |
20.647 |
99.307 |
176.708 |
For smaller robots, we expect the residuals to in the sub-millimeter range, while for larger robots, the residuals can be in the millimeter range. As for the rotational component of the residuals, we expect them to be in the sub-degree range.
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
1.800 |
46.595 |
2 |
15.119 |
64.707 |
3 |
14.726 |
143.476 |
4 |
7.726 |
176.708 |
5 |
12.562 |
99.719 |
6 |
5.175 |
94.542 |
7 |
20.020 |
109.891 |
8 |
14.028 |
92.717 |
9 |
20.647 |
88.241 |
10 |
10.870 |
142.423 |
11 |
1.818 |
52.156 |
12 |
7.910 |
108.207 |
13 |
11.969 |
65.376 |
14 |
6.329 |
105.534 |
Verification by Projection fails, which suggest that the hand-eye calibration is not correct, and that the touch test will fail badly.
Potential Cause
The poses were converted using an incorrect rotation convention when transferring them from the robot controller to the PC.
If the robot poses are converted using the wrong rotation convention, the orientation information becomes incorrect. Because hand-eye calibration relies heavily on accurate rotation data, even small convention mismatches lead to large orientation errors, which then corrupt the translation solution. This causes extremely large residuals, failed projection verification, and a completely invalid hand-eye transformation matrix, making the touch test unsafe.
Helping Tool: Pose Conversions
Zivid primarily operates with a (4x4) Transformation Matrix (Rotation Matrix + Translation Vector). Robot controllers and software typically represent poses as a combination of a position vector and an orientation representation in one of many formats. The Pose Conversions tools help to convert to and from:
Axis-Angle
Rotation Vector
Roll-Pitch-Yaw
Euler Angles
Quaternion
We offer a couple of tools for robot pose conversions:
Code samples (C++, C#, Python)
Code Sample

/*
Convert to/from Transformation Matrix (Rotation Matrix + Translation Vector)
Zivid primarily operate with a (4x4) transformation matrix. This example shows how to use Eigen to
convert to and from: AxisAngle, Rotation Vector, Roll-Pitch-Yaw, Quaternion
Note: the translation part of the transformation matrix is in millimeters (mm), since Zivid point clouds are in
millimeters. If your robot reports translation in meters, multiply it by 1000 before saving the pose.
The convenience functions from this example can be reused in applicable applications. The YAML files for this sample can
be found under the main instructions for Zivid samples.
For more information on pose conversions, check out this article:
https://support.zivid.com/en/latest/camera/reference-articles/pose-conversions.html
*/
#include <Zivid/Zivid.h>
#include <Eigen/Core>
#include <Eigen/Dense>
#include <Eigen/Geometry>
#include <iomanip>
#include <iostream>
#include <stdexcept>
namespace
{
enum class RotationConvention
{
zyxIntrinsic,
xyzExtrinsic,
xyzIntrinsic,
zyxExtrinsic,
nofROT
};
constexpr size_t nofRotationConventions = static_cast<size_t>(RotationConvention::nofROT);
struct RollPitchYaw
{
RotationConvention convention;
Eigen::Array3f rollPitchYaw;
};
std::string toString(RotationConvention convention)
{
switch(convention)
{
case RotationConvention::xyzIntrinsic: return "xyzIntrinsic";
case RotationConvention::xyzExtrinsic: return "xyzExtrinsic";
case RotationConvention::zyxIntrinsic: return "zyxIntrinsic";
case RotationConvention::zyxExtrinsic: return "zyxExtrinsic";
case RotationConvention::nofROT: break;
default: throw std::runtime_error{ "Unhandled rotation convention " };
}
throw std::invalid_argument("Invalid RotationConvention");
}
// The following function converts Roll-Pitch-Yaw angles in radians to Rotation Matrix.
// This function takes an array of angles, and a rotation convention, as input parameters.
// Whether the axes are moving (intrinsic) or fixed (extrinsic) is defined by the rotation convention.
// The order of elements in the output array follow the convention, i.e., for ZYX and zyx, the first
// element of the array is rotation around z-axis, for XYZ and xyz, the first element is rotation
// around x-axis.
Eigen::Matrix3f rollPitchYawToRotationMatrix(const Eigen::Array3f &rollPitchYaw, const RotationConvention &rotation)
{
switch(rotation)
{
case RotationConvention::xyzIntrinsic:
return (Eigen::AngleAxisf(rollPitchYaw[0], Eigen::Vector3f::UnitX())
* Eigen::AngleAxisf(rollPitchYaw[1], Eigen::Vector3f::UnitY())
* Eigen::AngleAxisf(rollPitchYaw[2], Eigen::Vector3f::UnitZ()))
.matrix();
case RotationConvention::zyxExtrinsic:
return (Eigen::AngleAxisf(rollPitchYaw[2], Eigen::Vector3f::UnitX())
* Eigen::AngleAxisf(rollPitchYaw[1], Eigen::Vector3f::UnitY())
* Eigen::AngleAxisf(rollPitchYaw[0], Eigen::Vector3f::UnitZ()))
.matrix();
case RotationConvention::zyxIntrinsic:
return (Eigen::AngleAxisf(rollPitchYaw[0], Eigen::Vector3f::UnitZ())
* Eigen::AngleAxisf(rollPitchYaw[1], Eigen::Vector3f::UnitY())
* Eigen::AngleAxisf(rollPitchYaw[2], Eigen::Vector3f::UnitX()))
.matrix();
case RotationConvention::xyzExtrinsic:
return (Eigen::AngleAxisf(rollPitchYaw[2], Eigen::Vector3f::UnitZ())
* Eigen::AngleAxisf(rollPitchYaw[1], Eigen::Vector3f::UnitY())
* Eigen::AngleAxisf(rollPitchYaw[0], Eigen::Vector3f::UnitX()))
.matrix();
case RotationConvention::nofROT: break;
default: throw std::runtime_error{ "Unhandled rotation convention" };
}
throw std::invalid_argument("Invalid orientation");
}
void rollPitchYawListToRotationMatrix(const std::vector<RollPitchYaw> &rpyList)
{
Eigen::IOFormat matrixFmt(4, 0, ", ", "\n", "[", "]", "[", "]");
for(const auto &rotation : rpyList)
{
std::cout << "Rotation Matrix from Roll-Pitch-Yaw angles (" << toString(rotation.convention)
<< "):" << std::endl;
const auto rotationMatrixFromRollPitchYaw =
rollPitchYawToRotationMatrix(rotation.rollPitchYaw, rotation.convention);
std::cout << rotationMatrixFromRollPitchYaw.format(matrixFmt) << std::endl;
}
}
// The following function converts Rotation Matrix to Roll-Pitch-Yaw angles in radians.
// Whether the axes are moving (intrinsic) or fixed (extrinsic) is defined by the rotation convention.
// The order of elements in the output array follow the convention, i.e., for ZYX and zyx, the first
// element of the array is rotation around z-axis, for XYZ and xyz, the first element is rotation
// around x-axis.
// Eigen only supports intrinsic Euler systems for simplicity. If you want to use extrinsic Euler systems,
// Eigen recoments just to use the equal intrinsic opposite order for axes and angles, i.e., axes (A,B,C)
// becomes (C,B,A), and angles (a,b,c) becomes (c,b,a).
Eigen::Array3f rotationMatrixToRollPitchYaw(
const Eigen::Matrix3f &rotationMatrix,
const RotationConvention &convention)
{
switch(convention)
{
case RotationConvention::zyxExtrinsic: return rotationMatrix.eulerAngles(0, 1, 2).reverse();
case RotationConvention::xyzIntrinsic: return rotationMatrix.eulerAngles(0, 1, 2);
case RotationConvention::xyzExtrinsic: return rotationMatrix.eulerAngles(2, 1, 0).reverse();
case RotationConvention::zyxIntrinsic: return rotationMatrix.eulerAngles(2, 1, 0);
case RotationConvention::nofROT: break;
default: throw std::runtime_error{ "Unhandled rotation convention" };
}
throw std::invalid_argument("Invalid rotation");
}
std::vector<RollPitchYaw> rotationMatrixToRollPitchYawList(const Eigen::Matrix3f &rotationMatrix)
{
const Eigen::IOFormat vectorFmt(4, 0, ", ", "", "", "", "[", "]");
std::vector<RollPitchYaw> rpyList;
for(size_t i = 0; i < nofRotationConventions; i++)
{
RotationConvention convention{ static_cast<RotationConvention>(i) };
std::cout << "Roll-Pitch-Yaw angles (" << toString(convention) << "):" << std::endl;
rpyList.push_back({ convention, rotationMatrixToRollPitchYaw(rotationMatrix, convention) });
std::cout << rpyList[i].rollPitchYaw.format(vectorFmt) << std::endl;
}
return rpyList;
}
Eigen::Vector3f rotationMatrixToRotationVector(const Eigen::Matrix3f &rotationMatrix)
{
const Eigen::AngleAxisf axisAngle(rotationMatrix);
return axisAngle.angle() * axisAngle.axis();
}
Eigen::Matrix3f rotationVectorToRotationMatrix(const Eigen::Vector3f &rotationVector)
{
Eigen::AngleAxisf axisAngle(rotationVector.norm(), rotationVector.normalized());
return axisAngle.toRotationMatrix();
}
void printHeader(const std::string &txt)
{
const std::string asterixLine = "****************************************************************";
std::cout << asterixLine << "\n* " << txt << std::endl << asterixLine << std::endl;
}
Eigen::Affine3f zividToEigen(const Zivid::Matrix4x4 &zividMatrix)
{
Eigen::Matrix4f eigenMatrix;
for(std::size_t row = 0; row < Zivid::Matrix4x4::rows; row++)
{
for(std::size_t column = 0; column < Zivid::Matrix4x4::cols; column++)
{
eigenMatrix(row, column) = zividMatrix(row, column);
}
}
Eigen::Affine3f eigenTransform{ eigenMatrix };
return eigenTransform;
}
Zivid::Matrix4x4 eigenToZivid(const Eigen::Affine3f &eigenTransform)
{
Eigen::Matrix4f eigenMatrix = eigenTransform.matrix();
Zivid::Matrix4x4 zividMatrix;
for(Eigen::Index row = 0; row < eigenMatrix.rows(); row++)
{
for(Eigen::Index column = 0; column < eigenMatrix.cols(); column++)
{
zividMatrix(row, column) = eigenMatrix(row, column);
}
}
return zividMatrix;
}
} // namespace
int main()
{
try
{
Zivid::Application zivid;
std::cout << std::setprecision(4);
Eigen::IOFormat matrixFormatRules(4, 0, ", ", "\n", "[", "]", "[", "]");
Eigen::IOFormat vectorFormatRules(4, 0, ", ", "", "", "", "[", "]");
printHeader("This example shows conversions to/from Transformation Matrix");
Zivid::Matrix4x4 transformationMatrixZivid(std::string(ZIVID_SAMPLE_DATA_DIR) + "/RobotTransform.yaml");
const Eigen::Affine3f transformationMatrix = zividToEigen(transformationMatrixZivid);
std::cout << transformationMatrix.matrix().format(matrixFormatRules) << std::endl;
// Extract Rotation Matrix and Translation Vector from Transformation Matrix
const Eigen::Matrix3f rotationMatrix = transformationMatrix.linear();
const Eigen::Vector3f translationVector = transformationMatrix.translation();
std::cout << "RotationMatrix:\n" << rotationMatrix.format(matrixFormatRules) << std::endl;
std::cout << "TranslationVector:\n" << translationVector.format(vectorFormatRules) << std::endl;
/*
* Convert from Rotation Matrix (Zivid) to other representations of orientation (Robot)
*/
printHeader("Convert from Zivid (Rotation Matrix) to Robot");
const Eigen::AngleAxisf axisAngle(rotationMatrix);
std::cout << "AxisAngle:\n"
<< axisAngle.axis().format(vectorFormatRules) << ", " << axisAngle.angle() << std::endl;
const Eigen::Vector3f rotationVector = rotationMatrixToRotationVector(rotationMatrix);
std::cout << "Rotation Vector:\n" << rotationVector.format(vectorFormatRules) << std::endl;
const Eigen::Quaternionf quaternion(rotationMatrix);
std::cout << "Quaternion:\n" << quaternion.coeffs().format(vectorFormatRules) << std::endl;
const auto rpyList = rotationMatrixToRollPitchYawList(rotationMatrix);
/*
* Convert to Rotation Matrix (Zivid) from other representations of orientation (Robot)
*/
printHeader("Convert from Robot to Zivid (Rotation Matrix)");
const Eigen::Matrix3f rotationMatrixFromAxisAngle = axisAngle.toRotationMatrix();
std::cout << "Rotation Matrix from Axis Angle:\n"
<< rotationMatrixFromAxisAngle.format(matrixFormatRules) << std::endl;
const Eigen::Matrix3f rotationMatrixFromRotationVector = rotationVectorToRotationMatrix(rotationVector);
std::cout << "Rotation Matrix from Rotation Vector:\n"
<< rotationMatrixFromRotationVector.format(matrixFormatRules) << std::endl;
const Eigen::Matrix3f rotationMatrixFromQuaternion = quaternion.toRotationMatrix();
std::cout << "Rotation Matrix from Quaternion:\n"
<< rotationMatrixFromQuaternion.format(matrixFormatRules) << std::endl;
rollPitchYawListToRotationMatrix(rpyList);
// Combine Rotation Matrix with Translation Vector to form Transformation Matrix
Eigen::Affine3f transformationMatrixFromQuaternion(rotationMatrixFromQuaternion);
transformationMatrixFromQuaternion.translation() = translationVector;
Zivid::Matrix4x4 transformationMatrixFromQuaternionZivid = eigenToZivid(transformationMatrixFromQuaternion);
transformationMatrixFromQuaternionZivid.save("RobotTransformOut.yaml");
}
catch(const std::exception &e)
{
std::cerr << "Error: " << e.what() << std::endl;
std::cout << "Press enter to exit." << std::endl;
std::cin.get();
return EXIT_FAILURE;
}
return EXIT_SUCCESS;
}
/*
Convert to/from Transformation Matrix (Rotation Matrix + Translation Vector)
Zivid primarily operate with a (4x4) transformation matrix. This example implements functions to convert to and from:
AxisAngle, Rotation Vector, Roll-Pitch-Yaw, Quaternion.
Note: the translation part of the transformation matrix is in millimeters (mm), since Zivid point clouds are in
millimeters. If your robot reports translation in meters, multiply it by 1000 before saving the pose.
The convenience functions from this example can be reused in applicable applications. The YAML files for this sample
can be found under the main instructions for Zivid samples.
For more information on pose conversions, check out this article:
https://support.zivid.com/en/latest/camera/reference-articles/pose-conversions.html
*/
using MathNet.Numerics.LinearAlgebra;
using MathNet.Numerics.LinearAlgebra.Double;
using System;
class Program
{
static void Main()
{
try
{
var zivid = new Zivid.NET.Application();
PrintHeader("This example shows conversions to/from Transformation Matrix");
var transformationMatrixZivid = new Zivid.NET.Matrix4x4(Environment.GetFolderPath(Environment.SpecialFolder.CommonApplicationData) + "/Zivid/RobotTransform.yaml");
var transformationMatrix = ZividToMathDotNet(transformationMatrixZivid);
Console.WriteLine(MatrixToString(transformationMatrix));
// Extract Rotation Matrix and Translation Vector from Transformation Matrix
var rotationMatrix = transformationMatrix.SubMatrix(0, 3, 0, 3);
var translationVector = transformationMatrix.SubMatrix(0, 3, 3, 1);
Console.WriteLine("RotationMatrix:\n" + MatrixToString(rotationMatrix));
Console.WriteLine("TranslationVector:\n" + MatrixToString(translationVector.Transpose()));
/*
* Convert from Rotation Matrix (Zivid) to other representations of orientation (Robot)
*/
PrintHeader("Convert from Zivid (Rotation Matrix) to Robot");
var axisAngle = RotationMatrixToAxisAngle(rotationMatrix);
Console.WriteLine("AxisAngle:\n" + MatrixToString(axisAngle.Axis.Transpose()) + ", " + String.Format(" {0:G4} ", axisAngle.Angle));
var rotationVector = axisAngle.Axis * axisAngle.Angle;
Console.WriteLine("Rotation Vector:\n" + MatrixToString(rotationVector.Transpose()));
var quaternion = RotationMatrixToQuaternion(rotationMatrix);
Console.WriteLine("Quaternion:\n" + MatrixToString(quaternion.Transpose()));
var rpyList = RotationMatrixToRollPitchYawList(rotationMatrix);
/*
* Convert to Rotation Matrix (Zivid) from other representations of orientation (Robot)
*/
PrintHeader("Convert from Robot to Zivid (Rotation matrix)");
var rotationMatrixFromAxisAngle = AxisAngleToRotationMatrix(axisAngle);
Console.WriteLine("Rotation Matrix from Axis Angle:\n" + MatrixToString(rotationMatrixFromAxisAngle));
var rotationMatrixFromRotationVector = RotationVectorToRotationMatrix(rotationVector);
Console.WriteLine("Rotation Matrix from Rotation Vector:\n" + MatrixToString(rotationMatrixFromRotationVector));
var rotationMatrixFromQuaternion = QuaternionToRotationMatrix(quaternion);
Console.WriteLine("Rotation Matrix from Quaternion:\n" + MatrixToString(rotationMatrixFromQuaternion));
RollPitchYawListToRotationMatrix(rpyList);
// Combine Rotation Matrix with Translation Vector to form Transformation Matrix
var transformationMatrixFromQuaternion = Matrix<double>.Build.Dense(4, 4);
transformationMatrixFromQuaternion.SetSubMatrix(0, 3, 0, 3, rotationMatrixFromQuaternion);
transformationMatrixFromQuaternion.SetSubMatrix(0, 3, 3, 1, translationVector);
var transformationMatrixFromQuaternionZivid = MathDotNetToZivid(transformationMatrixFromQuaternion);
transformationMatrixFromQuaternionZivid.Save("RobotTransformOut.yaml");
}
catch (Exception ex)
{
Console.WriteLine("Error: {0}", ex.ToString());
Environment.ExitCode = 1;
}
}
enum RotationConvention
{
zyxIntrinsic,
xyzExtrinsic,
xyzIntrinsic,
zyxExtrinsic
};
public class AxisAngle
{
public AxisAngle(Matrix<double> axis, double angle)
{
this.Axis = axis;
this.Angle = angle;
}
public Matrix<double> Axis { get; set; }
public double Angle { get; set; }
}
static Matrix<double> Skew(Matrix<double> vector)
// Assumes vector to be [3x1]
{
return CreateMatrix.DenseOfArray<double>(new double[,]
{
{ 0, -vector[2,0], vector[1,0] },
{ vector[2,0], 0, -vector[0,0] },
{ -vector[1,0], vector[0,0], 0 }
});
}
static AxisAngle RotationMatrixToAxisAngle(Matrix<double> rotationMatrix)
{
// See Rodrigues' formula or Skew-symmetric method
var skewSymmetricMatrix = (rotationMatrix - rotationMatrix.Transpose()) / 2;
Matrix<double> skewElements = CreateMatrix.DenseOfArray<double>(new double[,] { { skewSymmetricMatrix[2, 1] }, { skewSymmetricMatrix[0, 2] }, { skewSymmetricMatrix[1, 0] } });
var skewNorm = skewElements.Column(0, 0, 3).L2Norm();
Matrix<double> u = skewElements / skewNorm;
var theta = Math.Atan2(skewNorm, (rotationMatrix.Trace() - 1) / 2);
return new AxisAngle(u, theta);
}
static Matrix<double> AxisAngleToRotationMatrix(AxisAngle axisAngle)
{
//See Rodrigues' formula or Skew-symmetric method
var u = axisAngle.Axis;
var firstTerm = CreateMatrix.DenseIdentity<double>(3) * Math.Cos(axisAngle.Angle);
var secondTerm = u.Multiply(u.Transpose()) * (1 - Math.Cos(axisAngle.Angle));
var thirdTerm = Skew(u) * Math.Sin(axisAngle.Angle);
return firstTerm + secondTerm + thirdTerm;
}
static Matrix<double> RotationVectorToRotationMatrix(Matrix<double> rotationVector)
{
double theta = rotationVector.L2Norm();
return AxisAngleToRotationMatrix(new AxisAngle(rotationVector / theta, theta));
}
static Matrix<double> RotationMatrixToQuaternion(Matrix<double> rotationMatrix)
{
var qw = (Math.Sqrt(1 + rotationMatrix[0, 0] + rotationMatrix[1, 1] + rotationMatrix[2, 2])) / 2;
Matrix<double> quaternion = CreateMatrix.DenseOfArray<double>(new double[,]
{
{ (rotationMatrix[2,1] - rotationMatrix[1,2])/(4*qw) },
{ (rotationMatrix[0,2] - rotationMatrix[2,0])/(4*qw) },
{ (rotationMatrix[1,0] - rotationMatrix[0,1])/(4*qw) },
{ qw } // REAL PART
});
return quaternion;
}
static Matrix<double> QuaternionToRotationMatrix(Matrix<double> quaternion)
{
// Normalize quaternion
var nQ = quaternion / quaternion.L2Norm();
var firstTerm = CreateMatrix.DenseIdentity<double>(3);
var secondTerm = 2 * Skew(nQ.SubMatrix(0, 3, 0, 1)) * Skew(nQ.SubMatrix(0, 3, 0, 1));
var thirdTerm = 2 * nQ[3, 0] * Skew(nQ.SubMatrix(0, 3, 0, 1));
return firstTerm + secondTerm + thirdTerm;
}
static Matrix CreateRotationMatrix(string axis, double angle)
{
var matrix = DenseMatrix.CreateIdentity(3);
var cosAngle = Math.Cos(angle);
var sinAngle = Math.Sin(angle);
switch (axis)
{
case ("x"):
matrix[1, 1] = cosAngle;
matrix[2, 2] = cosAngle;
matrix[1, 2] = -sinAngle;
matrix[2, 1] = sinAngle;
break;
case ("y"):
matrix[0, 0] = cosAngle;
matrix[2, 2] = cosAngle;
matrix[0, 2] = sinAngle;
matrix[2, 0] = -sinAngle;
break;
case ("z"):
matrix[0, 0] = cosAngle;
matrix[1, 1] = cosAngle;
matrix[0, 1] = -sinAngle;
matrix[1, 0] = sinAngle;
break;
default: throw new Exception("Wrong axis; options are x, y, z.");
}
return matrix;
}
static Matrix CreateXRotation(double angle)
{
return CreateRotationMatrix("x", angle);
}
static Matrix CreateYRotation(double angle)
{
return CreateRotationMatrix("y", angle);
}
static Matrix CreateZRotation(double angle)
{
return CreateRotationMatrix("z", angle);
}
static Vector<double> RotationMatrixToRollPitchYaw(Matrix<double> rotationMatrix, RotationConvention convention)
{
double roll = -1;
double pitch = -1;
double yaw = -1;
switch (convention)
{
case RotationConvention.zyxExtrinsic:
case RotationConvention.xyzIntrinsic:
if (rotationMatrix[0, 2] < 1)
{
if (rotationMatrix[0, 2] > -1)
{
roll = Math.Atan2(-rotationMatrix[1, 2], rotationMatrix[2, 2]);
pitch = Math.Asin(rotationMatrix[0, 2]);
yaw = Math.Atan2(-rotationMatrix[0, 1], rotationMatrix[0, 0]);
}
else // R02 = −1
{
// Not a unique solution: yaw − roll = atan2(R01, R11)
roll = -Math.Atan2(rotationMatrix[1, 0], rotationMatrix[1, 1]);
pitch = -Math.PI / 2;
yaw = 0;
}
}
else // R02 = +1
{
// Not a unique solution: yaw + roll = atan2(R10, R11)
roll = Math.Atan2(rotationMatrix[1, 0], rotationMatrix[1, 1]);
pitch = Math.PI / 2;
yaw = 0;
}
break;
case RotationConvention.xyzExtrinsic:
case RotationConvention.zyxIntrinsic:
if (rotationMatrix[2, 0] < 1)
{
if (rotationMatrix[2, 0] > -1)
{
roll = Math.Atan2(rotationMatrix[1, 0], rotationMatrix[0, 0]);
pitch = Math.Asin(-rotationMatrix[2, 0]);
yaw = Math.Atan2(rotationMatrix[2, 1], rotationMatrix[2, 2]);
}
else // R20 = −1
{
// Not a unique solution: yaw − roll = atan2(−R12, R11)
roll = -Math.Atan2(rotationMatrix[1, 2], rotationMatrix[1, 1]);
pitch = Math.PI / 2;
yaw = 0;
}
}
else // R20 = +1
{
// Not a unique solution: yaw + roll = atan2(−R12, R11)
roll = Math.Atan2(rotationMatrix[1, 2], rotationMatrix[1, 1]);
pitch = -Math.PI / 2;
yaw = 0;
}
break;
}
switch (convention)
{
case RotationConvention.zyxExtrinsic:
case RotationConvention.xyzExtrinsic:
return CreateVector.DenseOfArray<double>(new double[] { yaw, pitch, roll });
case RotationConvention.xyzIntrinsic:
case RotationConvention.zyxIntrinsic:
return CreateVector.DenseOfArray<double>(new double[] { roll, pitch, yaw });
}
throw new ArgumentException("Invalid RotationConvention");
}
static Vector<double>[] RotationMatrixToRollPitchYawList(Matrix<double> rotationMatrix)
{
Vector<double>[] rpyList = new Vector<double>[Enum.GetValues(typeof(RotationConvention)).Length];
foreach (int i in Enum.GetValues(typeof(RotationConvention)))
{
RotationConvention convention = (RotationConvention)i;
Console.WriteLine("Roll-Pitch-Yaw angles (" + convention + "):");
rpyList[i] = RotationMatrixToRollPitchYaw(rotationMatrix, convention);
Console.WriteLine(VectorToString(rpyList[i]));
}
return rpyList;
}
static Matrix<double> RollPitchYawToRotationMatrix(Vector<double> rollPitchYaw, RotationConvention convention)
{
switch (convention)
{
case RotationConvention.xyzIntrinsic:
return CreateXRotation(rollPitchYaw[0]) * CreateYRotation(rollPitchYaw[1]) * CreateZRotation(rollPitchYaw[2]);
case RotationConvention.zyxIntrinsic:
return CreateZRotation(rollPitchYaw[0]) * CreateYRotation(rollPitchYaw[1]) * CreateXRotation(rollPitchYaw[2]);
case RotationConvention.zyxExtrinsic:
return CreateXRotation(rollPitchYaw[2]) * CreateYRotation(rollPitchYaw[1]) * CreateZRotation(rollPitchYaw[0]);
case RotationConvention.xyzExtrinsic:
return CreateZRotation(rollPitchYaw[2]) * CreateYRotation(rollPitchYaw[1]) * CreateXRotation(rollPitchYaw[0]);
default: throw new ArgumentException("Invalid RotationConvention");
}
}
static void RollPitchYawListToRotationMatrix(Vector<double>[] rpyList)
{
foreach (int i in Enum.GetValues(typeof(RotationConvention)))
{
RotationConvention convention = (RotationConvention)i;
Console.WriteLine("Rotation Matrix from Roll-Pitch-Yaw angles (" + convention + "):");
Console.WriteLine(MatrixToString(RollPitchYawToRotationMatrix(rpyList[i], convention)));
}
}
static Matrix<double> ZividToMathDotNet(Zivid.NET.Matrix4x4 zividMatrix)
{
return CreateMatrix.DenseOfArray(zividMatrix.ToArray()).ToDouble();
}
static Zivid.NET.Matrix4x4 MathDotNetToZivid(Matrix<double> mathNetMatrix)
{
return new Zivid.NET.Matrix4x4(mathNetMatrix.ToSingle().ToArray());
}
static void PrintHeader(string text)
{
string asterixLine = "****************************************************************";
Console.WriteLine(asterixLine + "\n* " + text + "\n" + asterixLine);
}
static string MatrixToString(Matrix<double> matrix)
{
string matrixString = "";
if (matrix.RowCount != 1)
{
matrixString = "[";
}
for (var i = 0; i < matrix.RowCount; i++)
{
matrixString += "[";
for (var j = 0; j < matrix.ColumnCount; j++)
{
matrixString += String.Format(" {0,9:G4} ", matrix[i, j]);
}
matrixString += "]\n ";
}
matrixString = matrixString.TrimEnd(' ');
matrixString = matrixString.TrimEnd('\n');
if (matrix.RowCount != 1)
{
matrixString += "]";
}
return matrixString;
}
static string VectorToString(Vector<double> vector)
{
string vectorString = "[";
for (var i = 0; i < vector.Count; i++)
{
vectorString += String.Format("{0,9:G4}", vector[i]);
}
vectorString += "]";
return vectorString;
}
}
"""
Convert to/from Transformation Matrix (Rotation Matrix + Translation Vector).
Zivid primarily operate with a (4x4) transformation matrix. This example shows how to use Eigen to convert to and from:
AxisAngle, Rotation Vector, Roll-Pitch-Yaw, Quaternion.
Note: the translation part of the transformation matrix is in millimeters (mm), since Zivid point clouds are in
millimeters. If your robot reports translation in meters, multiply it by 1000 before saving the pose.
The convenience functions from this example can be reused in applicable applications. The YAML files for this sample
can be found under the main instructions for Zivid samples.
For more information on pose conversions, check out this article:
https://support.zivid.com/en/latest/camera/reference-articles/pose-conversions.html
"""
import enum
from dataclasses import dataclass, field
from pathlib import Path
from typing import Dict, List, Optional
import numpy as np
import zivid
from scipy.spatial.transform import Rotation as R
from zividsamples.paths import get_sample_data_path
from zividsamples.save_load_matrix import assert_affine_matrix_and_save, load_and_assert_affine_matrix
class RotationConvention(enum.Enum):
"""Convenience enum class to list rotation conventions for Roll Pitch Yaw."""
ZYX_INTRINSIC = "ZYX"
XYZ_EXTRINSIC = "xyz"
XYZ_INTRINSIC = "XYZ"
ZYX_EXTRINSIC = "zyx"
class AxisAngle:
"""Convenience class to access rotation axis and angle."""
axis: np.ndarray
angle: np.floating
def __init__(self, axis: np.ndarray = np.array([0, 0, 1]), angle: Optional[float] = None):
"""Initialize class and its variables.
Can be initialized with a unit vector and an angle, or only a rotation vector.
Args:
axis: Rotation axis
angle: Rotation angle
Raises:
ValueError: If angle vector is provided, but vector is not a unit vector
"""
self.axis = axis
if angle is None:
self.angle = np.linalg.norm(axis)
self.axis = axis / self.angle
elif np.linalg.norm(axis) != 0:
raise ValueError("Angle provided, but vector is not unit vector")
else:
self.angle: np.floating = np.floating(angle)
def as_rotvec(self) -> np.ndarray:
"""Return rotation vector from axis angle.
Returns:
Rotation vector
"""
return self.axis * self.angle
def as_quaternion(self) -> np.ndarray:
"""Return quaternion from axis angle.
Returns:
Quaternion
"""
return R.from_rotvec(self.as_rotvec()).as_quat()
@dataclass
class Representations:
"""Class to hold various transformation representations."""
axis_angle: AxisAngle = AxisAngle()
rotation_vector: np.ndarray = field(default_factory=lambda: np.zeros(3))
quaternion: np.ndarray = field(default_factory=lambda: np.zeros(4))
rotations: list = field(default_factory=list)
def rotation_matrix_to_axis_angle(rotation_matrix: np.ndarray) -> AxisAngle:
"""Convert from Rotation Matrix --> Axis Angle.
Args:
rotation_matrix: A numpy array (3x3)
Returns:
AxisAngle
"""
rotation = R.from_matrix(rotation_matrix)
return AxisAngle(rotation.as_rotvec())
def rotation_matrix_to_rotation_vector(rotation_matrix: np.ndarray) -> np.ndarray:
"""Convert from Rotation Matrix --> Rotation Vector.
Args:
rotation_matrix: A numpy array (3x3)
Returns:
Rotation Vector
"""
rotation = R.from_matrix(rotation_matrix)
return rotation.as_rotvec()
def rotation_matrix_to_quaternion(rotation_matrix: np.ndarray) -> np.ndarray:
"""Convert from Rotation Matrix --> Quaternion.
Args:
rotation_matrix: A numpy array (3x3)
Returns:
Quaternion
"""
rotation = R.from_matrix(rotation_matrix)
return rotation.as_quat()
def rotation_matrix_to_roll_pitch_yaw(rotation_matrix: np.ndarray) -> List[Dict]:
"""Convert from Rotation Matrix --> Roll Pitch Yaw.
Args:
rotation_matrix: A numpy array (3x3)
Returns:
rpy_list: List of Roll Pitch Yaw angles in radians
"""
rpy_list = []
rotation = R.from_matrix(rotation_matrix)
for convention in RotationConvention:
roll_pitch_yaw = rotation.as_euler(convention.value)
print(f"Roll-Pitch-Yaw angles ({convention.name}):")
print(f"{roll_pitch_yaw}")
rpy_list.append({"convention": convention, "roll_pitch_yaw": roll_pitch_yaw})
return rpy_list
def axis_angle_to_rotation_matrix(axis_angle: AxisAngle) -> np.ndarray:
"""Convert from AxisAngle --> Rotation Matrix.
Args:
axis_angle: An AxisAngle object with axis and angle
Returns:
Rotation Matrix (3x3 numpy array)
"""
return R.from_quat(axis_angle.as_quaternion()).as_matrix()
def rotation_vector_to_rotation_matrix(rotvec: np.ndarray) -> np.ndarray:
"""Convert from Rotation Vector --> Rotation Matrix.
Args:
rotvec: A 3x1 numpy array
Returns:
Rotation Matrix (3x3 numpy array)
"""
return R.from_rotvec(rotvec).as_matrix()
def quaternion_to_rotation_matrix(quaternion: np.ndarray) -> np.ndarray:
"""Convert from Quaternion --> Rotation Matrix.
Args:
quaternion: A 4x1 numpy array
Returns:
Rotation Matrix (3x3 numpy array)
"""
return R.from_quat(quaternion).as_matrix()
def roll_pitch_yaw_to_rotation_matrix(rpy_list: List[Dict]) -> None:
"""Convert from Roll Pitch Yaw --> Rotation Matrix.
Args:
rpy_list: List of Roll Pitch Yaw angles in radians
"""
for rotation in rpy_list:
rotation_matrix = R.from_euler(rotation["convention"].value, rotation["roll_pitch_yaw"]).as_matrix()
print(f"Rotation Matrix from Roll-Pitch-Yaw angles ({rotation['convention'].name}):")
print(f"{rotation_matrix}")
def print_header(txt: str) -> None:
"""Print decorated header.
Args:
txt: Text to be printed in header
"""
terminal_width = 70
print()
print(f"{'*' * terminal_width}")
print(f"* {txt} {' ' * (terminal_width - len(txt) - 4)}*")
print(f"{'*' * terminal_width}")
def _main() -> None:
# Application class must be initialized before using other Zivid classes.
app = zivid.Application() # noqa: F841 # pylint: disable=unused-variable
np.set_printoptions(precision=4, suppress=True)
print_header("This example shows conversions to/from Transformation Matrix")
transformation_matrix = load_and_assert_affine_matrix(get_sample_data_path() / "RobotTransform.yaml")
print(f"Transformation Matrix:\n{transformation_matrix}")
# Extract Rotation Matrix and Translation Vector from Transformation Matrix
rotation_matrix = transformation_matrix[:3, :3]
translation_vector = transformation_matrix[:-1, -1]
print(f"Rotation Matrix:\n{rotation_matrix}")
print(f"Translation Vector:\n{translation_vector}")
###
# Convert from Zivid to Robot (Transformation Matrix --> any format)
###
print_header("Convert from Zivid (Rotation Matrix) to Robot")
axis_angle = rotation_matrix_to_axis_angle(rotation_matrix)
print(f"AxisAngle:\n{axis_angle.axis}, {axis_angle.angle:.4f}")
rotation_vector = rotation_matrix_to_rotation_vector(rotation_matrix)
print(f"Rotation Vector:\n{rotation_vector}")
quaternion = rotation_matrix_to_quaternion(rotation_matrix)
print(f"Quaternion:\n{quaternion}")
rpy_list = rotation_matrix_to_roll_pitch_yaw(rotation_matrix)
###
# Convert from Robot to Zivid (any format --> Rotation Matrix (part of Transformation Matrix))
###
print_header("Convert from Robot to Zivid (Rotation Matrix)")
rotation_matrix_from_axis_angle = axis_angle_to_rotation_matrix(axis_angle)
print(f"Rotation Matrix from Axis Angle:\n{rotation_matrix_from_axis_angle}")
rotation_matrix_from_rotation_vector = rotation_vector_to_rotation_matrix(rotation_vector)
print(f"Rotation Matrix from Rotation Vector:\n{rotation_matrix_from_rotation_vector}")
rotation_matrix_from_quaternion = quaternion_to_rotation_matrix(quaternion)
print(f"Rotation Matrix from Quaternion:\n{rotation_matrix_from_quaternion}")
roll_pitch_yaw_to_rotation_matrix(rpy_list)
# Replace rotation matrix in transformation matrix
transformation_matrix_from_quaternion = np.eye(4)
transformation_matrix_from_quaternion[:3, :3] = rotation_matrix_from_quaternion
transformation_matrix_from_quaternion[:-1, -1] = translation_vector
# Save transformation matrix which has passed through quaternion representation
assert_affine_matrix_and_save(
transformation_matrix_from_quaternion, Path(__file__).parent / "RobotTransformOut.yaml"
)
if __name__ == "__main__":
_main()
Potential Solution
Ensure the correct rotation convention is used when converting robot poses from the robot controller into the transformation matrices for Zivid hand-eye calibration.
Re-run the hand-eye calibration (using the corrected dataset).
Verify the hand-eye calibration results (transform, residuals, projection).
Run the touch test (if the hand-eye calibration results are good).
Reproducing the issue (wrong rotation convention)
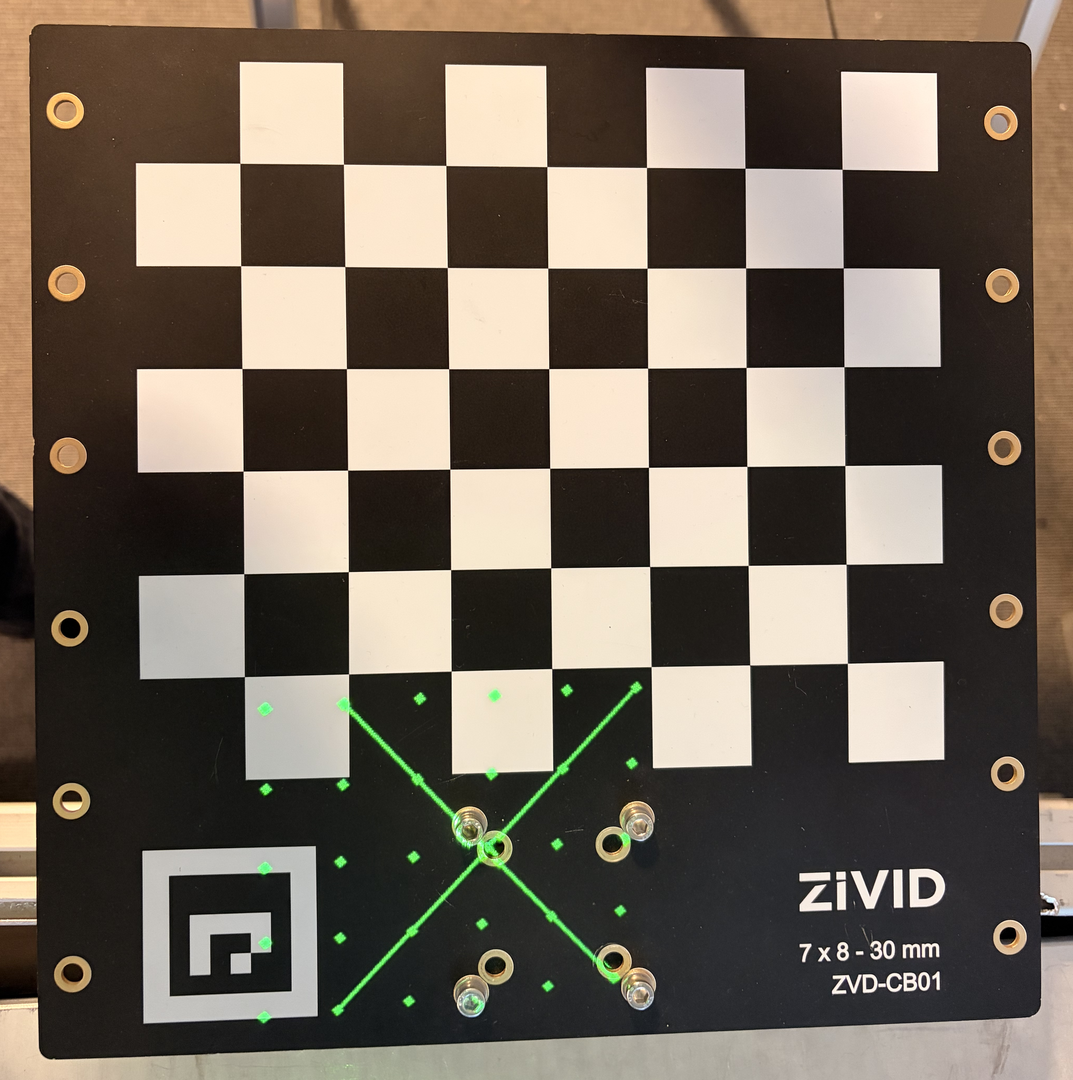
Good Dataset
A hand-eye calibration was successfully performed using the dataset shown in the images below.

The calibration resulted in the following results:
0.9991385 |
-0.00262377 |
0.04141687 |
-55.73573 |
0.001416378 |
0.9995739 |
0.02915465 |
-91.3017 |
-0.04147572 |
-0.02907087 |
0.9987165 |
129.1951 |
0 |
0 |
0 |
1 |
N (Poses) |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|
14 |
0.028 |
0.068 |
0.133 |
0.278 |
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
0.030 |
0.149 |
2 |
0.039 |
0.278 |
3 |
0.021 |
0.065 |
4 |
0.037 |
0.138 |
5 |
0.013 |
0.272 |
6 |
0.014 |
0.079 |
7 |
0.018 |
0.133 |
8 |
0.013 |
0.075 |
9 |
0.038 |
0.088 |
10 |
0.015 |
0.061 |
11 |
0.026 |
0.179 |
12 |
0.036 |
0.065 |
13 |
0.068 |
0.209 |
14 |
0.023 |
0.066 |
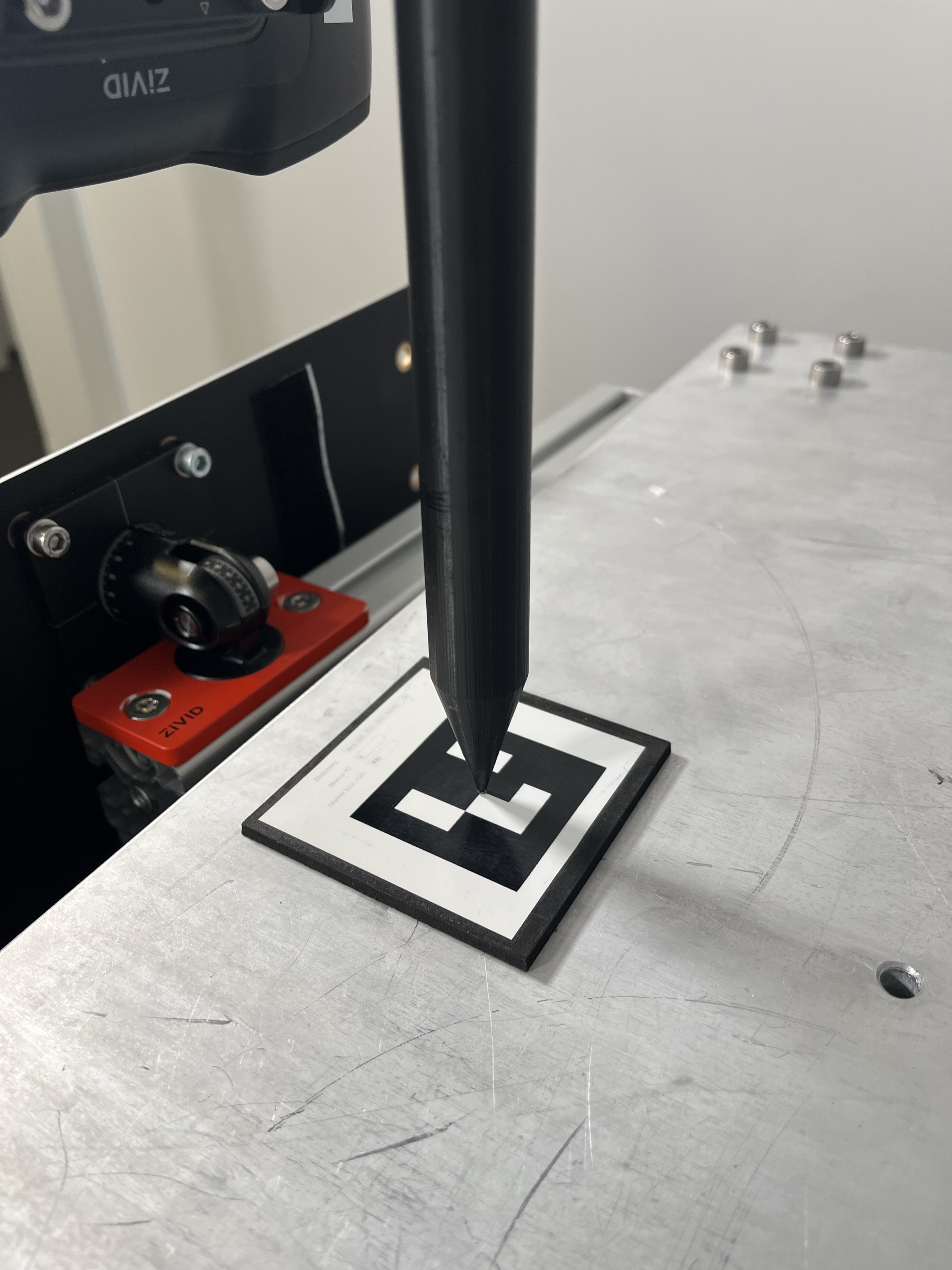
The Hand-Eye calibration was verified with a touch test.

The touch test was successful, which confirms that the hand-eye calibration is correct and accurate.
Bad Dataset (wrong rotation convention)
To simulate the mistake of using the wrong rotation convention, the following was done for each robot pose from the good dataset:
The transformation matrix was converted to Roll-Pitch-Yaw angles, assuming extrinsic fixed Z-Y-X:
The resulting Roll-Pitch-Yaw angles (same numeric angles) were converted back to the transformation matrix form, but using the wrong convention (intrinsic z-y-x):
The translation vector was kept unchanged.
The calibration resulted in the following results:
-0.402 |
0.908 |
-0.117 |
134.552 |
-0.910 |
-0.411 |
-0.060 |
-440.257 |
-0.102 |
0.082 |
0.991 |
-706.041 |
0 |
0 |
0 |
1 |
N (Poses) |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|
14 |
10.764 |
20.647 |
99.307 |
176.708 |
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
1.800 |
46.595 |
2 |
15.119 |
64.707 |
3 |
14.726 |
143.476 |
4 |
7.726 |
176.708 |
5 |
12.562 |
99.719 |
6 |
5.175 |
94.542 |
7 |
20.020 |
109.891 |
8 |
14.028 |
92.717 |
9 |
20.647 |
88.241 |
10 |
10.870 |
142.423 |
11 |
1.818 |
52.156 |
12 |
7.910 |
108.207 |
13 |
11.969 |
65.376 |
14 |
6.329 |
105.534 |
Verification by Projection failed, which suggest that the hand-eye calibration is not correct, and that the touch test would fail badly.
Comparisons
The results between hand-eye calibration matrices (translation values) and hand-eye calibration residuals are compared in the tables below.
Dataset |
X (mm) |
Y (mm) |
Z (mm) |
|---|---|---|---|
Good |
-55.73573 |
-91.3017 |
129.1951 |
Bad (wrong rot. convention) |
134.552 |
-440.257 |
-706.041 |
Δ (Good - Bad) |
-190.288 |
348.955 |
835.236 |
Dataset |
N |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|---|
Good |
14 |
0.028 |
0.068 |
0.133 |
0.278 |
Bad (wrong rot. convention) |
14 |
10.764 |
20.647 |
99.307 |
176.708 |