Touch Test Fails (Poor Robot Positioning Accuracy) after Mild Collision
Problem
After a mild collision, your robot positioning accuracy is compromised. This is observed as offsets in object picking/placement and failed touch tests, where the robot’s tool tip does not land on the expected point.
Before the collision, your hand-eye calibration results were good, and the touch test passed successfully.
Hand-Eye Transform |
Hand-Eye Residuals |
Projection Verification |
Touch Test |
|---|---|---|---|
Reasonable |
Good |
Good |
Good → Collision → Bad |
Example of good hand-eye calibration results
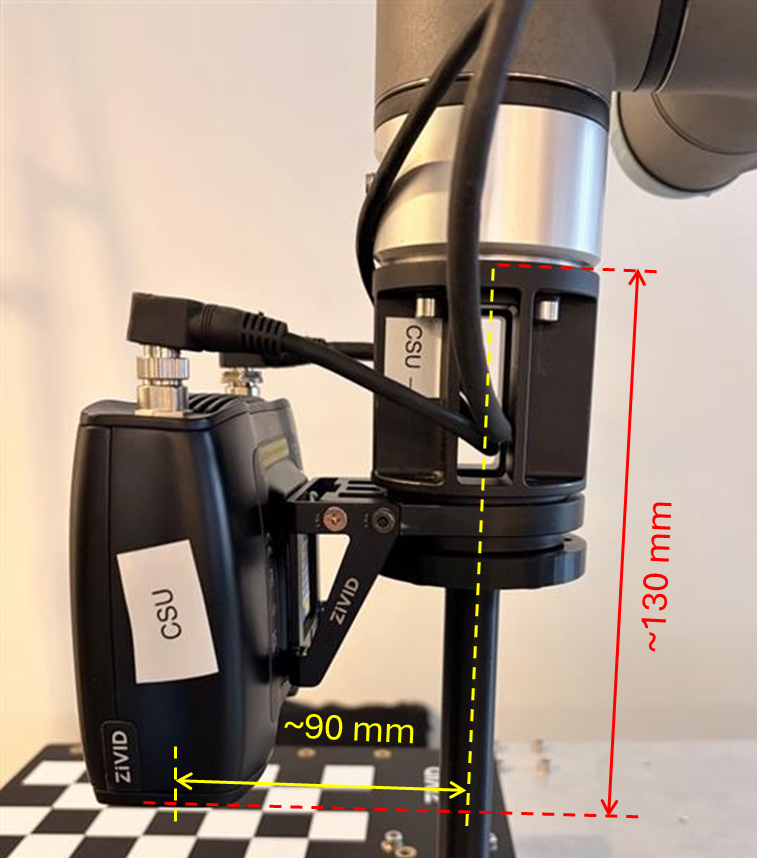
The Hand-Eye Transformation Matrix appears reasonable and is consistent with what one would expect from rough manual measurements (see table and image below).
0.999 |
-0.002 |
0.0412 |
-55.598 |
0.001 |
0.999 |
0.0283 |
-90.654 |
-0.041 |
-0.028 |
0.998 |
129.044 |
0 |
0 |
0 |
1 |
The calibration residuals are within an acceptable range, indicating that the optimization has converged successfully.
N (Poses) |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|
10 |
0.021 |
0.042 |
0.109 |
0.172 |
For smaller robots, we expect the residuals to in the sub-millimeter range, while for larger robots, the residuals can be in the millimeter range. As for the rotational component of the residuals, we expect them to be in the sub-degree range.
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
0.017292 |
0.163 |
2 |
0.008218 |
0.135 |
3 |
0.028 |
0.172 |
4 |
0.009 |
0.053 |
5 |
0.042 |
0.080 |
6 |
0.008 |
0.098 |
7 |
0.022 |
0.138 |
8 |
0.025 |
0.077 |
9 |
0.036 |
0.125 |
10 |
0.013 |
0.048 |
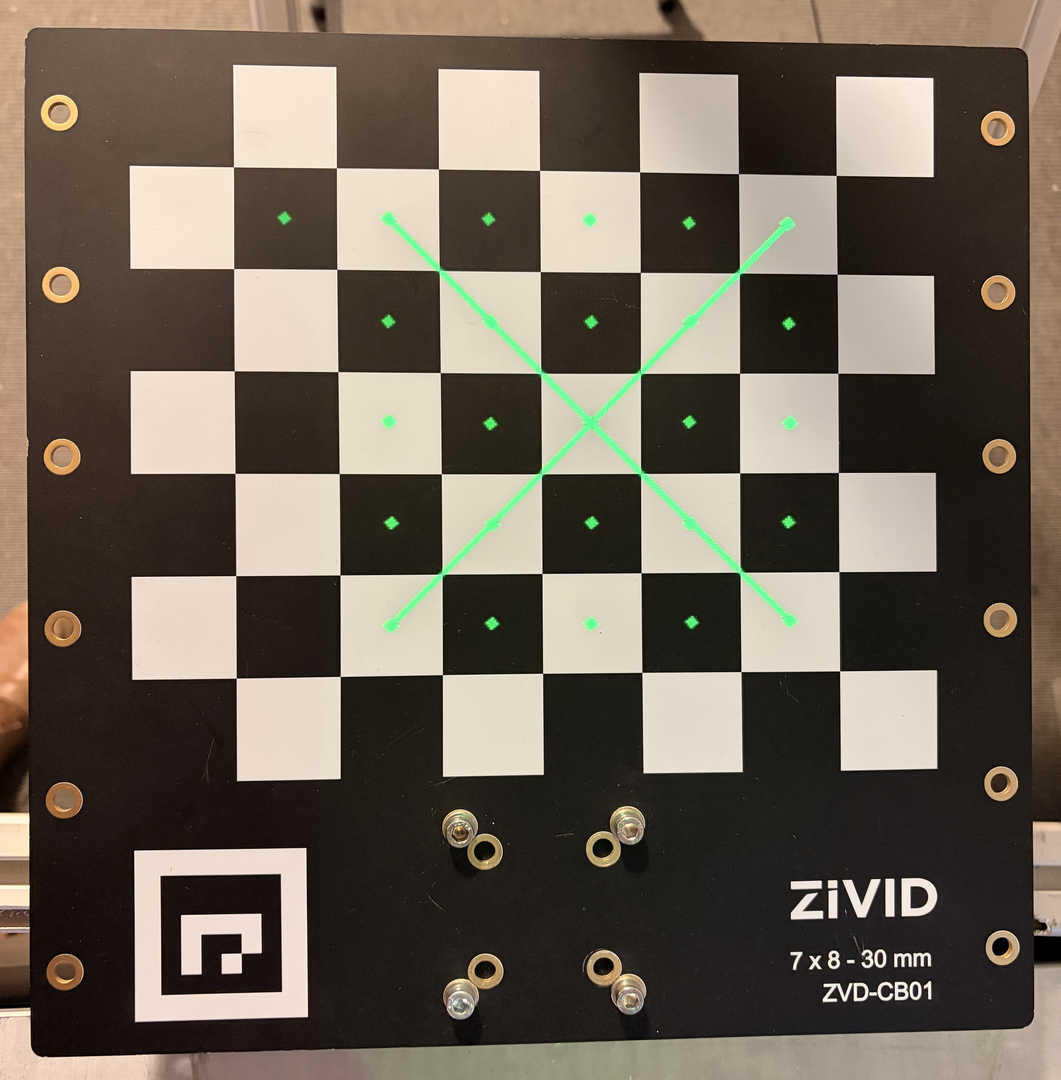
Verification using projection also passes, indicating that the hand-eye transformation is correct and accurate.
Potential Cause
Mild collisions can cause slight shifts in the robot’s joints or end-effector, which may not be severe enough to cause visible damage but can still affect the accuracy of the hand-eye calibration. This can result in failed touch tests and inaccurate robot positioning.
Potential Solution
Warm-up the camera and perform Infield Correction.
Repeat the Hand-Eye Calibration using the initial dataset.
Verify the Hand-Eye Calibration results (transform, residuals, projection).
Re-run the touch test.