手眼标定良好(TCP 不正确),但触碰测试失败(机器人定位精度差)
问题
您的手眼标定结果看起来不错,但触碰测试失败了。
手眼变换 |
手眼残差 |
投影验证 |
触碰测试 |
|---|---|---|---|
合理的 |
好 |
好 |
差 |
良好的手眼标定结果示例
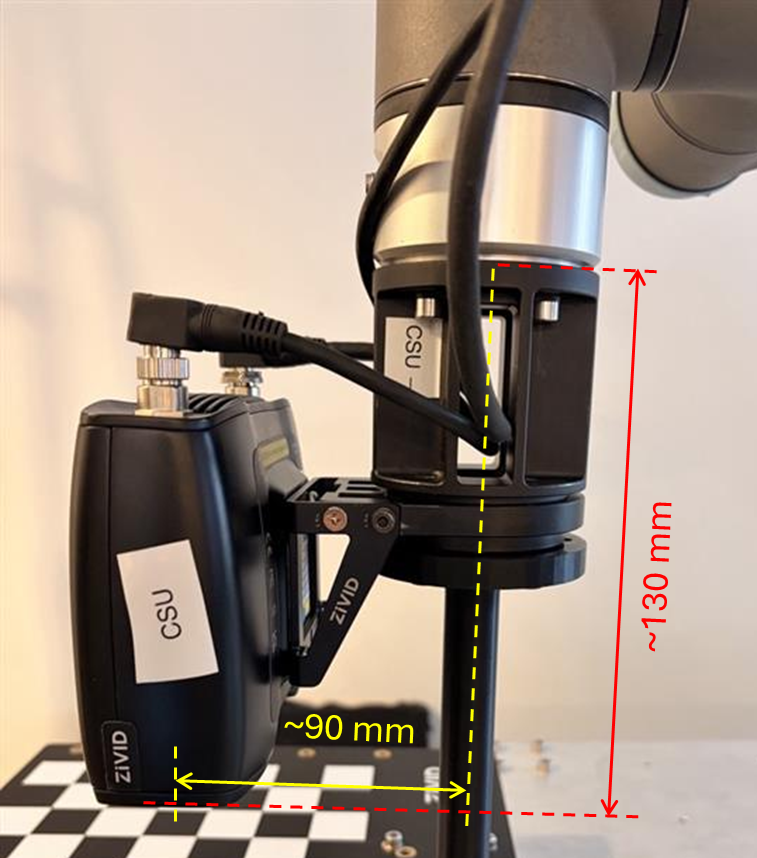
手眼变换矩阵看起来合理,与粗略的手动测量结果一致(见下表和图像)。
0.999 |
-0.002 |
0.0412 |
-55.598 |
0.001 |
0.999 |
0.0283 |
-90.654 |
-0.041 |
-0.028 |
0.998 |
129.044 |
0 |
0 |
0 |
1 |
标定的残差在可接受的范围内,表明优化已成功收敛。
N(位姿) |
平均旋转角度(°) |
最大旋转角度(°) |
平均平移残差(mm) |
最大平移残差(mm) |
|---|---|---|---|---|
10 |
0.021 |
0.042 |
0.109 |
0.172 |
对于小型机器人,我们预计残差在亚毫米范围内;而对于大型机器人,残差则在毫米范围内。至于残差的旋转分量,我们预计其在亚度范围内。
全部的残差数据
位姿 |
旋转角度(°) |
平移量(mm) |
|---|---|---|
1 |
0.017292 |
0.163 |
2 |
0.008218 |
0.135 |
3 |
0.028 |
0.172 |
4 |
0.009 |
0.053 |
5 |
0.042 |
0.080 |
6 |
0.008 |
0.098 |
7 |
0.022 |
0.138 |
8 |
0.025 |
0.077 |
9 |
0.036 |
0.125 |
10 |
0.013 |
0.048 |
使用投影进行验证也通过了,表明手眼变换是正确和准确的。
成功完成手眼标定后,您会立即观察到以下一种或多种情况:
触碰测试失败(未落在预期位置)。
机器人定位似乎不准确(例如,物体拾取/放置始终存在偏移)。
在 TCP 坐标系中旋转时,机器人尖端会"漂移"或以小弧线扫过。
潜在原因
工具中心点 (TCP) 不正确(测量错误或未对准)。
即使手眼标定结果的残差看起来良好,错误的TCP也意味着机器人*假定的*工具尖端位置与*实际*尖端位置不符。这会导致:
良好的手眼标定数学
物理精度差
触碰测试未命中目标
TCP坐标系中的旋转导致工具尖端出现可见漂移(这是最可靠的指标)。
这种不匹配是手眼标定正确完成后触碰测试失败的最常见原因。
如果触碰测试失败,如何验证 TCP?
这是推荐且最安全的 TCP 验证方法。它无需任何接触,只需 旋转 即可,并且能够清晰地显示 TCP 错误。
备注
建议使用机器人制造商提供的 TCP 校准方法和验证工具。
先决条件:
已启用示教/慢速模式。
坚硬、固定的尖状物体(例如,垂直立在平面上的螺丝)。
配备尖锐工具的机器人。
流程:
定位工具末端:移动机器人,使工具的尖端与参考对象的尖端精确重合。(无需施加接触力,仅进行对齐即可。)
切换到 TCP 坐标系:在机器人示教器上,选择 TCP 坐标系。
围绕 TCP 旋转:围绕 X、Y 和 Z 轴进行小幅旋转(±10-30°)。不要 进行平移。
请查看工具尖端:
如果 TCP 正确: 工具尖端在整个旋转过程中始终保持在参考点上。
如果TCP不正确: 旋转过程中,工具尖端会明显地扫过一个圆弧或相对于参考点发生偏移。这种漂移是 TCP 错误或测量不准的决定性标志。
如果发现漂移,则重新测量 TCP。
潜在解决方案
使用尖头参考物以及机器人内置的 TCP 校准程序,重新标定 TCP。
重复进行 TCP 验证旋转测试。
确认 TCP 正确后,重新运行触碰测试。
备注
即使 TCP 错误,手眼标定残差看起来良好也是正常的。手眼标定解决的是坐标系之间的转换问题,而不是工具尖端的物理位置问题。
当有疑问的时候,通过旋转法来验证 TCP 比重跑一次标定要快得多。