如何获取用于手眼标定的优质数据集
高质量的手眼标定很大程度上取决于您收集的数据集。为了获得准确的结果,收集高质量的数据至关重要,因为标定质量完全取决于用户。
我们建议采集 10-20 对机器人位姿和点云数据,以进行可靠的标定。
机器人位姿要求
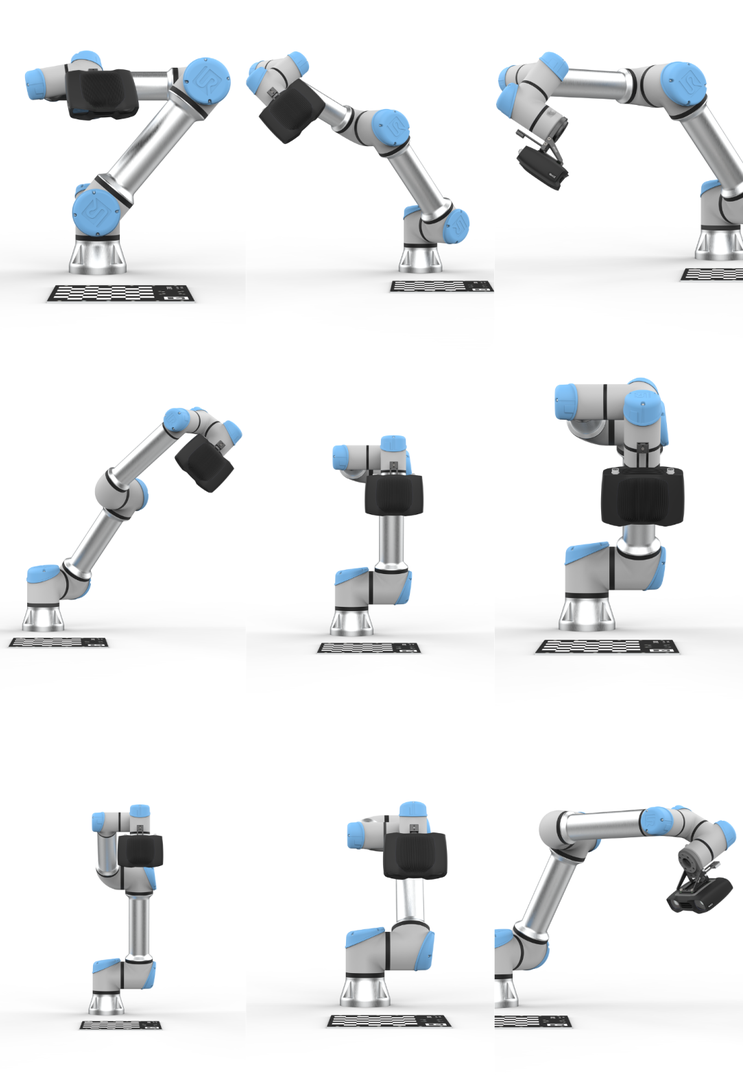
当相机拍摄标定对象图像时,机器人应采用以下位姿:
种类丰富,提供不同的视角
分布于所有关节,而不仅仅是部分关节
这确保了视角的多样性。下图展示了眼在手外(eye-to-hand)和眼在手上(eye-in-hand)两种情况下所需的不同位姿。
备注
Zivid 点云数据的单位是毫米(mm);因此,请确保用于手眼标定的机器人输入位姿中,平移量也使用毫米(mm)作为单位。
如果可能,机器人位姿还应满足以下条件:
使用与最终应用相同的机器人配置(位姿)(例如,执行抓取任务时使用的位姿配置)。
在与实际应用相同的工作空间区域内(例如,执行抓取任务的料箱处)。
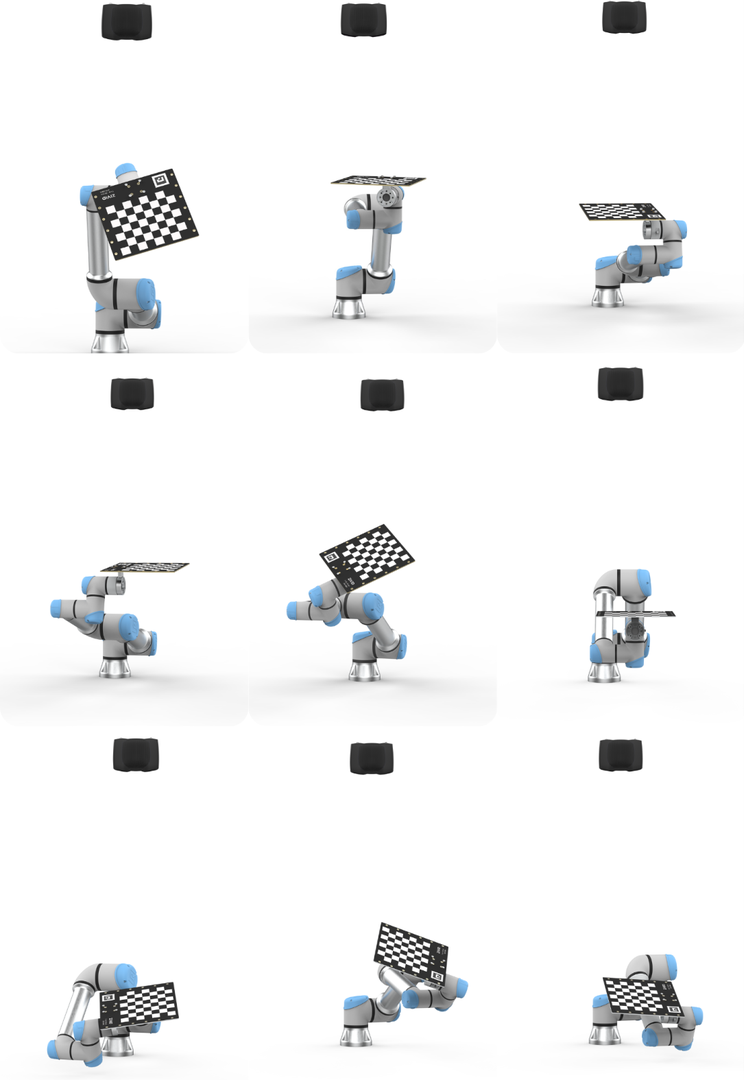
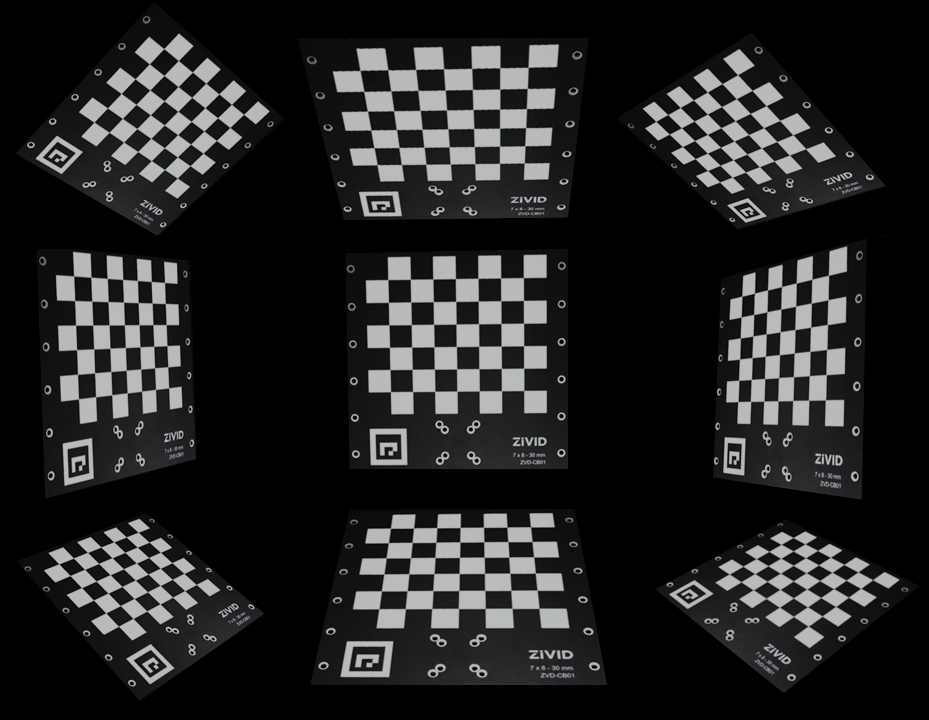
标定对象可见性
标定对象 应在相机视野中曝光良好且完全可见。如果可能,请尽量将标定板保持在相机 FOV 的中心位置。采集数据时,请务必考虑相机的成像范围。
备注
如果使用 ArUco 标记点作为标定对象,并不要求在每个机器人位姿下,相机 FOV 内都必须完整显示所有标记。不过,视野中可见的标记数量越多,检测效果和标定结果就会越理想。
下图展示了相机捕获到的标定对象。
获取数据集
在进行手眼标定之前:
在预热、现场标定以及手眼标定阶段,请使用与最终实际应用完全相同的采集周期。使用我们的 手眼标定图形用户界面(Hand-Eye GUI) 可以让这一过程变得简单直观。
为了进一步降低温度相关性能因素带来的影响,请确保已启用 Thermal Stabilization(热稳定功能) 。
小技巧
如果您想在没有自己的数据集的情况下测试 Zivid 手眼标定过程,可以使用 Hand-Eye Calibration Sample Dataset 。
如果您在采集高质量点云时遇到困难,请查阅 如何获取 Zivid 标定对象的高质量数据 。否则,请继续阅读 手眼标定的注意事项和建议 。