拼接
重要
下载示例拼接 Sample Data(示例数据) 数据集和参考文件,以便跟随操作或运行示例代码。
介绍
本文是关于如何拼接 Zivid 的无序点云的深入教程。
为了理解真正的问题,我们先来简单了解一下这个应用。与任何相机或人眼一样,Zivid 相机无法透视或绕过物体,它一次只能观察一侧。因此,要获得物体的完整 3D 模型,必须通过旋转物体或重新定位相机来从多个视角捕获它。
The Problem
Zivid SDK 返回的点云以 相机坐标系 表示,其中原点位于相机内部。从多个视角捕获时,每个点云都相对于捕获时相机的坐标系进行定义。如果只是简单地组合这些点云而不进行坐标系变换,它们将无法在空间上对齐,在 3D 空间中会显得脱节且不连贯。换句话说,这些点云并不共享与被扫描对象关联的通用坐标系。
解决方案
要将多个点云合并为对象的单个、空间对齐的 3D 表征,您需要:
将所有点云转换为附加在被扫描物体上的通用坐标系。
优化对齐以补偿位姿估计中的任何噪音或小错误。
The transformation from each camera coordinate system to the common coordinate system can come from various sources: robot kinematics, motion tracking systems, or manual measurements.
However, these transformations are rarely perfect and usually introduce small alignment errors.
To correct these errors, you can use Experimental::Toolbox::localPointCloudRegistration().
This API tool refines the alignment between two overlapping point clouds by computing a transformation matrix that best registers one point cloud to another.
Before starting to stitch point clouds, it is important to make sure that the point clouds are captured with enough overlapping feature points. Also we must discard data that can lead to incorrect stitching, such as points that are too far away from the camera or points that are not part of the object/scene we are stitching. We recommend using the Zivid's Region of Interest(感兴趣区域) before stitching. For the captures where the camera is stationary it is possible to define the region of interest once and use it for all captures. While using a robot arm to move the camera around the object, it is likely necessary to configure a different region of interest for each point cloud. Alternatively, you can define a single workspace ROI box in the robot base frame and apply it as post-processing after transforming each point cloud to the base frame. This way the same ROI volume filters every capture regardless of viewpoint.
备注
Zivid 样本数据中所有需要拼接的点云均已经过 ROI 过滤。
Stitching Point Clouds without Pre-Alignment
This section demonstrates stitching point clouds without pre-alignment.
The key requirement is that the relative movement between the object and the camera is small enough from one point cloud to another to ensure significant overlap between captures.
In this example, the object remains stationary while the camera is slightly moved between captures, and Experimental::Toolbox::localPointCloudRegistration() is used to align the point clouds.
We begin with a simple example that stitches two point clouds without prior pose information, followed by a more advanced case using a rotary table to scan the entire object.
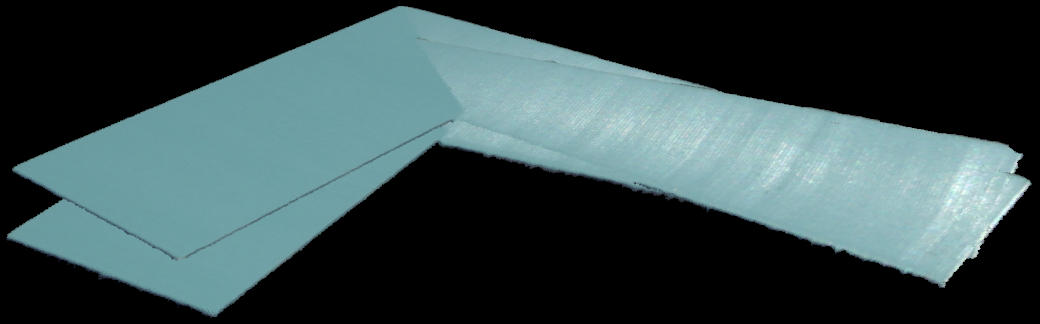
Stitching Two Point Clouds
这个简单示例演示了如何在没有预对齐的情况下拼接两个点云。要使用此方法进行拼接,我们需要:
加载两个 ZDF 文件。
将点云转换为无序格式。
应用体素下采样。
估计对齐的变换。
将点云拼接到一起。
对最终的拼接结果进行下采样。
Here is how to load the ZDF files and convert the point clouds to unorganized format using PointCloud::toUnorganizedPointCloud().
The unorganized point clouds are joined in one UnorganizedPointCloud object using UnorganizedPointCloud::extend(), and displayed.

// Ensure the dataset is extracted to the correct location depending on the operating system:
// - Windows: %ProgramData%/Zivid/StitchingPointClouds/
// - Linux: /usr/share/Zivid/data/StitchingPointClouds/
// StitchingPointClouds/
// └── BlueObject/
std::cout << "Reading point clouds from ZDF files" << std::endl;
const auto directory = std::filesystem::path(ZIVID_SAMPLE_DATA_DIR) / "StitchingPointClouds" / "BlueObject";
if(!std::filesystem::exists(directory))
{
std::ostringstream oss;
oss << "Missing dataset folders.\n"
<< "Make sure 'StitchingPointClouds/BlueObject/' exist at " << ZIVID_SAMPLE_DATA_DIR << ".\n\n"
<< "You can download the dataset (StitchingPointClouds.zip) from:\n"
<< "https://support.zivid.com/en/latest/api-reference/samples/sample-data.html";
throw std::runtime_error(oss.str());
}
const auto frame1 = Zivid::Frame((directory / "BlueObject.zdf").string());
const auto frame2 = Zivid::Frame((directory / "BlueObjectSlightlyMoved.zdf").string());
std::cout << "Converting organized point clouds to unorganized point clouds and voxel downsampling"
<< std::endl;
const auto unorganizedPointCloud1 = frame1.pointCloud().toUnorganizedPointCloud();
const auto unorganizedPointCloud2 = frame2.pointCloud().toUnorganizedPointCloud();
std::cout << "Displaying point clouds before stitching" << std::endl;
Zivid::UnorganizedPointCloud unorganizedNotStitchedPointCloud;
unorganizedNotStitchedPointCloud.extend(unorganizedPointCloud1);
unorganizedNotStitchedPointCloud.extend(unorganizedPointCloud2);
visualizePointCloud(unorganizedNotStitchedPointCloud);
// Ensure the dataset is extracted to the correct location depending on the operating system:
// - Windows: %ProgramData%/Zivid/StitchingPointClouds/
// - Linux: /usr/share/Zivid/data/StitchingPointClouds/
// StitchingPointClouds/
// └── BlueObject/
var sampleDataDir = Environment.GetFolderPath(Environment.SpecialFolder.CommonApplicationData) + "/Zivid";
var directory = Path.Combine(sampleDataDir, "StitchingPointClouds", "BlueObject");
Console.WriteLine("Reading point clouds from ZDF files");
if (!Directory.Exists(directory))
{
Console.WriteLine("Missing dataset folders.");
Console.WriteLine("Make sure 'StitchingPointClouds/BlueObject/' exists at " + sampleDataDir);
Console.WriteLine("You can download the dataset (StitchingPointClouds.zip) from:");
Console.WriteLine("https://support.zivid.com/en/latest/api-reference/samples/sample-data.html");
return 1;
}
var frame1 = new Zivid.NET.Frame(Path.Combine(directory, "BlueObject.zdf"));
var frame2 = new Zivid.NET.Frame(Path.Combine(directory, "BlueObjectSlightlyMoved.zdf"));
Console.WriteLine("Converting organized point clouds to unorganized point clouds and voxel downsampling");
var unorganizedPointCloud1 = frame1.PointCloud.ToUnorganizedPointCloud();
var unorganizedPointCloud2 = frame2.PointCloud.ToUnorganizedPointCloud();
Console.WriteLine("Displaying point clouds before stitching");
var unorganizedNotStitchedPointCloud = new Zivid.NET.UnorganizedPointCloud();
unorganizedNotStitchedPointCloud.Extend(unorganizedPointCloud1);
unorganizedNotStitchedPointCloud.Extend(unorganizedPointCloud2);
VisualizePointCloud(unorganizedNotStitchedPointCloud);
# Ensure the dataset is extracted to the correct location depending on the operating system:
# • Windows: %ProgramData%\\Zivid\\StitchingPointClouds\\
# • Linux: /usr/share/Zivid/data/StitchingPointClouds/
# The folder must contain:
# StitchingPointClouds/
# └── BlueObject/
print("Reading point clouds from files")
directory = get_sample_data_path() / "StitchingPointClouds" / "BlueObject"
if not directory.exists() or not directory.exists():
raise FileNotFoundError(
f"Missing dataset folders.\n"
f"Make sure 'StitchingPointClouds/BlueObject' exist at {get_sample_data_path()}.\n\n"
f"You can download the dataset (StitchingPointClouds.zip) from:\n"
f"https://support.zivid.com/en/latest/api-reference/samples/sample-data.html"
)
frame_1 = zivid.Frame(directory / "BlueObject.zdf")
frame_2 = zivid.Frame(directory / "BlueObjectSlightlyMoved.zdf")
print("Converting organized point clouds to unorganized point clouds and voxel downsampling")
unorganized_point_cloud_1 = frame_1.point_cloud().to_unorganized_point_cloud()
unorganized_point_cloud_2 = frame_2.point_cloud().to_unorganized_point_cloud()
print("Displaying point clouds before stitching")
unorganized_not_stitched_point_cloud = zivid.UnorganizedPointCloud()
unorganized_not_stitched_point_cloud.extend(unorganized_point_cloud_1)
unorganized_not_stitched_point_cloud.extend(unorganized_point_cloud_2)
display_pointcloud(unorganized_not_stitched_point_cloud)
Voxel downsampling is applied to reduce the number of points for faster registration.
We then compute the transformation matrix between two point clouds using Experimental::Toolbox::localPointCloudRegistration().
The second point cloud is transformed using the resulting transform and added to the final point cloud (UnorganizedPointCloud object containing the first point cloud).
To complete the stitching, we apply voxel downsampling to the stitched point cloud, and display the result.
std::cout << "Estimating transformation between point clouds" << std::endl;
const auto unorganizedPointCloud1LPCR = unorganizedPointCloud1.voxelDownsampled(1.0, 3);
const auto unorganizedPointCloud2LPCR = unorganizedPointCloud2.voxelDownsampled(1.0, 3);
const auto registrationParams = Zivid::Experimental::LocalPointCloudRegistrationParameters{};
const auto localPointCloudRegistrationResult = Zivid::Experimental::Toolbox::localPointCloudRegistration(
unorganizedPointCloud1LPCR, unorganizedPointCloud2LPCR, registrationParams);
if(!localPointCloudRegistrationResult.converged())
{
throw std::runtime_error("Registration did not converge...");
}
const auto pointCloud1ToPointCloud2Transform = localPointCloudRegistrationResult.transform();
const auto unorganizedPointCloud2Transformed =
unorganizedPointCloud2.transformed(pointCloud1ToPointCloud2Transform.toMatrix());
std::cout << "Stitching and displaying painted point clouds to evaluate stitching quality" << std::endl;
Zivid::UnorganizedPointCloud finalPointCloud;
finalPointCloud.extend(unorganizedPointCloud1);
finalPointCloud.extend(unorganizedPointCloud2Transformed);
Zivid::UnorganizedPointCloud paintedFinalPointCloud;
paintedFinalPointCloud.extend(unorganizedPointCloud1.paintedUniformColor(Zivid::ColorRGBA{ 255, 0, 0, 255 }));
paintedFinalPointCloud.extend(
unorganizedPointCloud2Transformed.paintedUniformColor(Zivid::ColorRGBA{ 0, 255, 0, 255 }));
visualizePointCloud(paintedFinalPointCloud);
std::cout << "Voxel-downsampling the stitched point cloud" << std::endl;
finalPointCloud = finalPointCloud.voxelDownsampled(2.0, 1);
std::cout << "Visualize the overlapped point clouds" << std::endl;
visualizePointCloud(finalPointCloud);
Console.WriteLine("Estimating transformation between point clouds");
var unorganizedPointCloud1LPCR = unorganizedPointCloud1.VoxelDownsampled(1.0f, 3);
var unorganizedPointCloud2LPCR = unorganizedPointCloud2.VoxelDownsampled(1.0f, 3);
var registrationParams = new Zivid.NET.Experimental.LocalPointCloudRegistrationParameters();
var identityPose = new Pose(Zivid.NET.Matrix4x4.Identity());
var localPointCloudRegistrationResult = PointCloudRegistration.LocalPointCloudRegistration(
unorganizedPointCloud1LPCR,
unorganizedPointCloud2LPCR,
registrationParams,
identityPose);
if (!localPointCloudRegistrationResult.Converged)
{
throw new Exception("Registration did not converge...");
}
var pointCloud1ToPointCloud2Transform = localPointCloudRegistrationResult.Transform;
var unorganizedPointCloud2Transformed =
unorganizedPointCloud2.Transform(pointCloud1ToPointCloud2Transform.ToMatrix());
Console.WriteLine("Stitching and displaying painted point clouds to evaluate stitching quality");
var finalPointCloud = new Zivid.NET.UnorganizedPointCloud();
finalPointCloud.Extend(unorganizedPointCloud1);
finalPointCloud.Extend(unorganizedPointCloud2Transformed);
var paintedFinalPointCloud = new Zivid.NET.UnorganizedPointCloud();
paintedFinalPointCloud.Extend(unorganizedPointCloud1.PaintedUniformColor(new Zivid.NET.ColorRGBA { r = 255, g = 0, b = 0, a = 255 }));
paintedFinalPointCloud.Extend(unorganizedPointCloud2Transformed.PaintedUniformColor(new Zivid.NET.ColorRGBA { r = 0, g = 255, b = 0, a = 255 }));
VisualizePointCloud(paintedFinalPointCloud);
Console.WriteLine("Voxel-downsampling the stitched point cloud");
finalPointCloud = finalPointCloud.VoxelDownsampled(2.0f, 1);
Console.WriteLine("Visualize the overlapped point clouds");
VisualizePointCloud(finalPointCloud);
print("Estimating transformation between point clouds")
unorganized_point_cloud_1_lpcr = unorganized_point_cloud_1.voxel_downsampled(voxel_size=1.0, min_points_per_voxel=3)
unorganized_point_cloud_2_lpcr = unorganized_point_cloud_2.voxel_downsampled(voxel_size=1.0, min_points_per_voxel=3)
registration_params = LocalPointCloudRegistrationParameters()
local_point_cloud_registration_result = local_point_cloud_registration(
target=unorganized_point_cloud_1_lpcr, source=unorganized_point_cloud_2_lpcr, parameters=registration_params
)
assert local_point_cloud_registration_result.converged(), "Registration did not converge..."
point_cloud_1_to_point_cloud_2_transform = local_point_cloud_registration_result.transform()
unorganized_point_cloud_2_transformed = unorganized_point_cloud_2.transformed(
point_cloud_1_to_point_cloud_2_transform.to_matrix()
)
print("Stitching and displaying painted point clouds to evaluate stitching quality")
final_point_cloud = zivid.UnorganizedPointCloud()
final_point_cloud.extend(unorganized_point_cloud_1)
final_point_cloud.extend(unorganized_point_cloud_2_transformed)
painted_final_point_cloud = zivid.UnorganizedPointCloud()
painted_final_point_cloud.extend(unorganized_point_cloud_1.painted_uniform_color([255, 0, 0, 255]))
painted_final_point_cloud.extend(unorganized_point_cloud_2_transformed.painted_uniform_color([0, 255, 0, 255]))
display_pointcloud(painted_final_point_cloud)
print("Voxel-downsampling the stitched point cloud")
final_point_cloud = final_point_cloud.voxel_downsampled(voxel_size=2.0, min_points_per_voxel=1)
display_pointcloud(final_point_cloud)
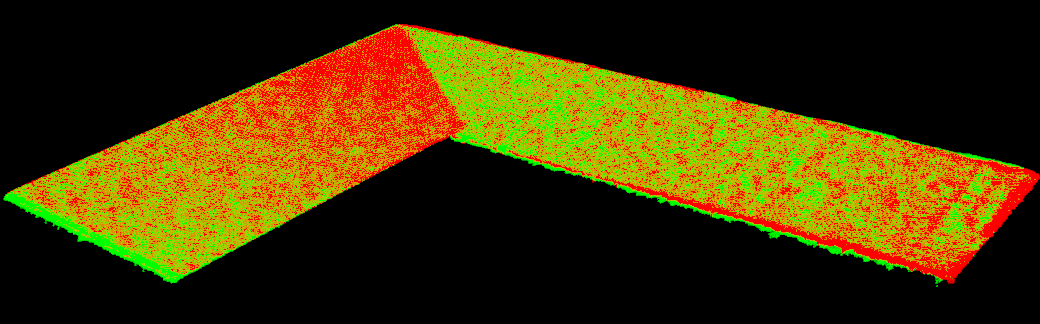
可以在拼接前为各个点云赋予统一的颜色,以直观地可视化对齐质量。
Stitching with a Rotary Table
此示例演示了如何拼接放置在旋转台上的物体的点云。要使用此方法进行拼接,我们需要:
连接到 Zivid 相机。
加载使用了感兴趣区域 (ROI) 的相机设置。
当物体旋转时捕获多个点云。
将每次捕获转换为无序的点云并进行下采样。
将新的 frame 注册到不断增长的模型中。
将不断增长的模型拼接到新的 frame 中。
进行下采样、显示结果并将最终结果导出为多边形文件格式 (.ply)。
备注
在此示例中,旋转台在约 25 秒内完成 360 度旋转。由于每个周期耗时超过 250 毫秒(包括捕获、传输、处理和拼接),我们在每次捕获之间添加了 1 秒的延迟。这样一来,我们便可以从物体周围均匀分布的角度进行约 20 次捕获。
我们首先连接相机,并加载一个包含已定义 ROI 的捕获设置。如前所述,ROI 的定义应包含转台上的物体。理想情况下,最好避免捕获转台本身的点,但如果物体足够大,通常也可以包含一些转台上的点。
std::cout << "Connecting to camera" << std::endl;
auto camera = app.connectCamera();
std::cout << "Loading settings from file: " << settingsPath << std::endl;
const auto settings = Zivid::Settings(settingsPath);
Console.WriteLine("Connecting to camera");
using (var camera = zivid.ConnectCamera())
{
Console.WriteLine("Loading settings from file: " + settingsPath);
var settings = new Zivid.NET.Settings(settingsPath);
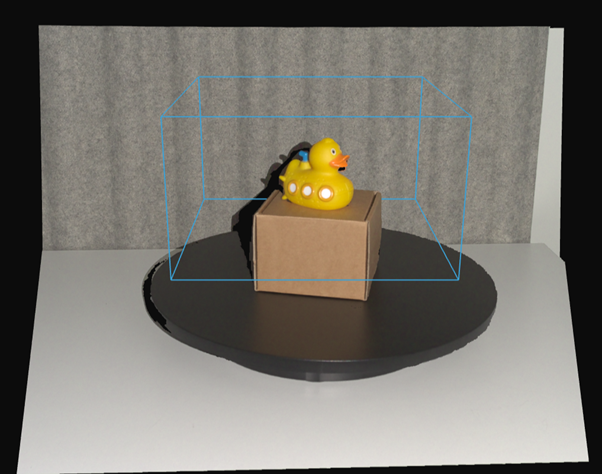 演示点云中感兴趣区域的放置。
演示点云中感兴趣区域的放置。
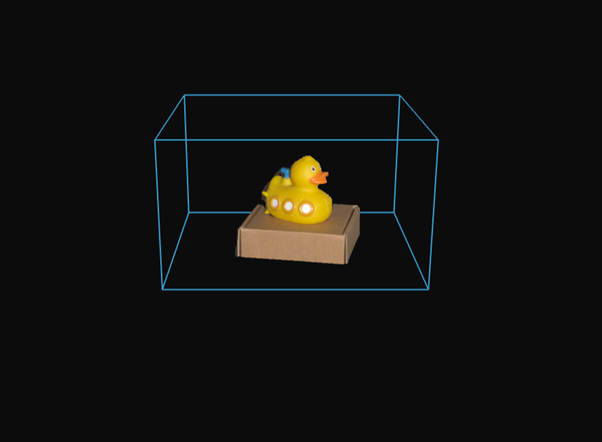 点云中感兴趣区域的放置结果。
点云中感兴趣区域的放置结果。
接下来,我们需要捕获旋转物体的点云,并应用局部点云配准技术进行对齐。每个新捕捉到的点云都将成为参考 frame,之前拼接的模型将转换到该 frame 中。
为什么要转换拼接模型而不是最后一次捕获呢?因为将最后一次捕获的模型转换为固定的世界坐标系需要应用所有之前的转换,从而导致误差累积。通过始终将现有模型转换为最新的 frame,误差可以保持在局部范围内,更易于控制。
Zivid::UnorganizedPointCloud unorganizedStitchedPointCloud;
auto registrationParams = Zivid::Experimental::LocalPointCloudRegistrationParameters{};
auto previousToCurrentPointCloudTransform = Zivid::Matrix4x4::identity();
for(int numberOfCaptures = 0; numberOfCaptures < 20; ++numberOfCaptures)
{
std::this_thread::sleep_for(std::chrono::seconds(1));
auto frame = camera.capture2D3D(settings);
const auto unorganizedPointCloud = frame.pointCloud().toUnorganizedPointCloud().voxelDownsampled(1.0, 2);
if(numberOfCaptures != 0)
{
if(unorganizedStitchedPointCloud.size() < 4 || unorganizedPointCloud.size() < 4)
{
std::cout << "Not enough points for registration, skipping stitching..." << std::endl;
continue;
}
const auto registrationResult = Zivid::Experimental::Toolbox::localPointCloudRegistration(
unorganizedStitchedPointCloud,
unorganizedPointCloud,
registrationParams,
previousToCurrentPointCloudTransform);
if(!registrationResult.converged())
{
std::cout << "Registration did not converge..." << std::endl;
continue;
}
previousToCurrentPointCloudTransform = registrationResult.transform().toMatrix();
unorganizedStitchedPointCloud.transform(previousToCurrentPointCloudTransform.inverse());
}
unorganizedStitchedPointCloud.extend(unorganizedPointCloud);
std::cout << "Captures done: " << numberOfCaptures << std::endl;
}
std::cout << "Voxel-downsampling the stitched point cloud" << std::endl;
unorganizedStitchedPointCloud = unorganizedStitchedPointCloud.voxelDownsampled(0.75, 2);
visualizePointCloud(unorganizedStitchedPointCloud);
var unorganizedStitchedPointCloud = new Zivid.NET.UnorganizedPointCloud();
var registrationParams = new Zivid.NET.Experimental.LocalPointCloudRegistrationParameters();
var previousToCurrentPointCloudTransform = new Pose(Zivid.NET.Matrix4x4.Identity());
var captureCount = 20;
for (int numberOfCaptures = 0; numberOfCaptures < captureCount; ++numberOfCaptures)
{
Thread.Sleep(TimeSpan.FromSeconds(1));
using (var frame = camera.Capture2D3D(settings))
{
var unorganizedPointCloud = frame.PointCloud.ToUnorganizedPointCloud().VoxelDownsampled(1.0f, 2);
if (numberOfCaptures != 0)
{
if (unorganizedStitchedPointCloud.Size < 4 || unorganizedPointCloud.Size < 4)
{
Console.WriteLine("Not enough points for registration, skipping stitching...");
continue;
}
var registrationResult = PointCloudRegistration.LocalPointCloudRegistration(
unorganizedStitchedPointCloud,
unorganizedPointCloud,
registrationParams,
previousToCurrentPointCloudTransform);
if (!registrationResult.Converged)
{
Console.WriteLine("Registration did not converge, skipping this frame...");
continue;
}
previousToCurrentPointCloudTransform = registrationResult.Transform;
var previousToCurrentMatrix = new Zivid.NET.Matrix4x4(previousToCurrentPointCloudTransform.ToMatrix());
unorganizedStitchedPointCloud.Transform(previousToCurrentMatrix.Inverse());
}
unorganizedStitchedPointCloud.Extend(unorganizedPointCloud);
Console.WriteLine("Captures done: " + (numberOfCaptures + 1));
}
}
Console.WriteLine("Voxel-downsampling the stitched point cloud");
unorganizedStitchedPointCloud = unorganizedStitchedPointCloud.VoxelDownsampled(0.75f, 2);
VisualizePointCloud(unorganizedStitchedPointCloud);
previous_to_current_point_cloud_transform = np.eye(4)
unorganized_stitched_point_cloud = zivid.UnorganizedPointCloud()
registration_params = LocalPointCloudRegistrationParameters()
for number_of_captures in range(20):
time.sleep(1)
frame = camera.capture_2d_3d(settings)
unorganized_point_cloud = (
frame.point_cloud().to_unorganized_point_cloud().voxel_downsampled(voxel_size=1.0, min_points_per_voxel=2)
)
if number_of_captures != 0:
local_point_cloud_registration_result = local_point_cloud_registration(
target=unorganized_stitched_point_cloud,
source=unorganized_point_cloud,
parameters=registration_params,
initial_transform=previous_to_current_point_cloud_transform,
)
if not local_point_cloud_registration_result.converged():
print("Registration did not converge...")
continue
previous_to_current_point_cloud_transform = local_point_cloud_registration_result.transform().to_matrix()
unorganized_stitched_point_cloud.transform(np.linalg.inv(previous_to_current_point_cloud_transform))
unorganized_stitched_point_cloud.extend(unorganized_point_cloud)
print(f"Captures done: {number_of_captures}")
print("Voxel-downsampling the stitched point cloud")
unorganized_stitched_point_cloud = unorganized_stitched_point_cloud.voxel_downsampled(
voxel_size=0.75, min_points_per_voxel=2
)
display_pointcloud(unorganized_stitched_point_cloud)
备注
由于旋转台以恒定的角速度旋转,连续点云之间的变换应该相似。因此,可以将前一次的变换作为下一次配准的初始猜测。
最终,拼接结果会进一步进行体素下采样(voxel-downsampled)并显示。请参见下方的拼接点云结果。
Stitching Point Clouds with Pre-Alignment
When you have a way to estimate the relative pose between captures up front, that pre-alignment can be combined with local point cloud registration to refine the result. The pre-alignment transformation can come from different sources, and the right choice depends on your setup:
Using a Robot Arm (Hand-Eye Calibration): relative motion between camera and object is provided by a robot. Either the camera is mounted on the robot and moved around a stationary object (eye-in-hand), or the camera is stationary and the robot moves the object in front of it (eye-to-hand).
Using Multi-Camera Calibration (Multiple Stationary Cameras): multiple stationary cameras observing the same scene from different angles.
Using a transformation known from another source (e.g. a turntable pose, a Zivid calibration board, or an ArUco marker): see Stitch by transform for how to apply such transforms before stitching.
Using a Robot Arm (Hand-Eye Calibration)
This section outlines the process of stitching point clouds acquired from different relative poses between camera and object, using hand-eye calibration data and local point cloud registration. The same approach applies to both hand-eye configurations:
Eye-in-hand: the camera is mounted on the robot and moved around a stationary object.
Eye-to-hand: the camera is stationary and the robot holds and moves the object in front of it.
The rest of this section uses the eye-in-hand configuration as the running example. The workflow and math are equivalent for eye-to-hand. The robot pose then describes the object's pose, not the camera's.
概述和要求
这种拼接方法可通过机械臂搭载相机围绕物体移动,从而生成该物体完整的三维点云。它特别适用于以下场景:
物体比相机的视野范围更大。
需要从多个角度对物体进行捕获,以用于检测、建模或操作。
要使用此方法,您需要一个有效的 手眼标定 结果。该结果通常以 hand_eye_transform.yaml 文件形式提供,该文件定义了机器人末端执行器坐标系与相机坐标系之间的转换关系。利用这一变换,可以将不同相机位姿下捕获的点云转换到同一公共坐标系中,从而实现多视角点云的精确对齐。
您需要:
一组已捕获的 Zivid 点云(
capture_*.zdf)一组对应的机器人位姿文件(
robot_pose_*.yaml)——每次捕获对应一个位姿文件从成功的手眼标定过程中获得的
hand_eye_transform.yaml
这些元素结合起来,可以让您将各个捕获的数据在统一的坐标系中进行预对齐。
拼接工作流程
拼接过程主要包括以下几个步骤:
加载从不同机器人位姿捕获的多个点云。
加载每个位姿(
robot_pose_*.yaml)和手眼标定结果(hand_eye_transform.yaml)。使用手眼变换将每个机器人位姿转换到相机位姿。
将点云从相机坐标系转换到机器人基坐标系,对点云进行预对齐。
Apply a workspace ROI box in the base frame to discard background from every viewpoint.
对每个点云(体素网格)进行下采样,以加快处理速度并减少噪声。
使用局部点云配准(Local Point Cloud Registration)来优化不断增加数据的已拼接点云与每个新加入点云之间的对齐精度。
(可选)重新加载原始的全分辨率点云,并应用估计的转换关系,以全分辨率进行拼接。
将最终结果导出为拼接后的 .ply 点云文件。
[Robot Arm (Pose A)] -> capture_1.zdf
[Robot Arm (Pose B)] -> capture_2.zdf
...
[Robot Arm (Pose N)] -> capture_N.zdf
Each capture is paired with:
- robot_pose_*.yaml
- hand_eye_transform.yaml
Apply:
- Pre-alignment using robot pose and hand-eye calibration
- Workspace ROI box filtering in robot base frame
- Local point cloud registration for refinement
Output:
- Combined and visualized point cloud
- Optionally reload original captures for full-resolution stitching
Export:
- Final stitched point cloud as a PLY file
A workspace ROI box is defined in the robot base frame and applied as post-processing after each point cloud is transformed to the base frame. This filters out background from every viewpoint without needing a per-capture ROI configuration:
const auto smallWorkspaceRoiBox = Zivid::Settings::RegionOfInterest::Box{
Zivid::Settings::RegionOfInterest::Box::Enabled::yes,
Zivid::Settings::RegionOfInterest::Box::PointO{ -150, 300, 50 },
Zivid::Settings::RegionOfInterest::Box::PointA{ -150, 600, 50 },
Zivid::Settings::RegionOfInterest::Box::PointB{ 150, 300, 50 },
Zivid::Settings::RegionOfInterest::Box::Extents{ -75, 40 },
};
auto pointCloud = frame.pointCloud();
pointCloud.transform(baseToCameraTransform);
pointCloud.maskByRegionOfInterest(workspaceRoiBox);
var smallWorkspaceRoiBox = new Zivid.NET.Settings.RegionOfInterestGroup.BoxGroup
{
Enabled = true,
PointO = new Zivid.NET.PointXYZ { x = -150, y = 300, z = 50 },
PointA = new Zivid.NET.PointXYZ { x = -150, y = 600, z = 50 },
PointB = new Zivid.NET.PointXYZ { x = 150, y = 300, z = 50 },
};
smallWorkspaceRoiBox.Extents = new Zivid.NET.Range<double>(-75, 40);
var pointCloud = frame.PointCloud;
pointCloud.Transform(baseToCameraTransform);
pointCloud.MaskByRegionOfInterest(workspaceRoiBox);
small_workspace_roi_box = zivid.Settings.RegionOfInterest.Box(
enabled=True,
point_o=[-150, 300, 50],
point_a=[-150, 600, 50],
point_b=[150, 300, 50],
extents=(-75, 40),
)
point_cloud = frame.point_cloud()
point_cloud.transform(base_to_camera_transform)
point_cloud.mask_by_region_of_interest(workspace_roi_box)
局部配准(Local Registration)的工作原理
在利用机器人位姿和手眼标定结果完成初始预对齐后,仍需进一步优化,以补偿微小的位姿误差。局部点云配准通过将每个下采样后的点云与不断增长的拼接点云(即先前已拼接的点云)进行对齐,从而提高整体精度。
在进行配准之前,所有点云都会进行体素下采样。这一步骤对于拼接过程至关重要,因为它:
降低传感器噪声,从而实现更可靠的对齐
有助于移除离群点,避免其对配准过程造成干扰
通过在不损失结构细节的前提下减少点的数量,来提升处理速度
用户在流程开始前选择拼接策略,但实际的拼接操作仅在所有转换关系估计完成之后才执行:
低分辨率拼接:使用在对齐过程中准备好的下采样点云。
高分辨率拼接:重新加载原始的全分辨率点云,并应用已估计的变换,以生成细节更丰富的最终点云。
备注
不使用体素下采样( --full-resolution )的拼接可生成更好细节的点云,但需要更多的内存和计算时间。
备注
在进行局部配准时,点云必须已在预对齐步骤中达到相对较好的初始对齐状态。如果初始错位过大,算法可能无法收敛,或产生不准确的结果。
参数 max_correspondence_distance 定义了在源点云和目标点云之间搜索对应点的匹配半径。该参数应满足以下要求:
大于典型的点间距(以确保能够找到正确的匹配点)
但也不能过大,以免包含错误的对应点,从而降低对齐质量
auto registrationParameters = Zivid::Experimental::LocalPointCloudRegistrationParameters{
Zivid::Experimental::LocalPointCloudRegistrationParameters::MaxCorrespondenceDistance{ 2 }
};
var registrationParameters = new Zivid.NET.Experimental.LocalPointCloudRegistrationParameters();
registrationParameters.MaxCorrespondenceDistance = 2.0f;
下图展示了某个因尺寸超出相机视场而需要多次捕获的物体的拼接点云结果。
Zivid SDK 示例
探索使用机器人搭载相机进行点云拼接的完整示例代码:
Accuracy of a Robot-Mounted Stitched Point Cloud
The accuracy of a stitched point cloud captured from a robot-mounted camera is determined by the error in each individual static capture, plus any error introduced by the robot and the stitching pipeline. The main contributors are:
Camera dimension trueness error — the static accuracy of a single capture, specified per camera model. See Zivid Specs Terminology for the definition and how to read the datasheet values.
Hand-eye calibration error — how accurately the camera's pose on the robot flange is known relative to the robot's end-effector; in other words, the transformation from the camera coordinate system to the robot flange coordinate system. This is determined by hand-eye calibration and is sensitive to mount rigidity (see 手臂安装方案的机械注意事项).
Robot mastering error — how accurately the robot itself knows its joint zero positions and link geometry. This is a property of the robot and varies between manufacturers, models, and individual units.
Robot repeatability and absolute accuracy — the difference between commanded and actual robot pose. Repeatability is typically published by the robot manufacturer; absolute accuracy is usually worse than repeatability and is rarely published.
Stitching algorithm error — the residual misalignment left after pre-alignment from robot poses and refinement with local point cloud registration. This depends on overlap, scene texture, and registration parameters.
备注
Zivid does not publish a global accuracy specification for robot-mounted stitched point clouds because the non-camera contributors are heavily manufacturer, setup, and context-dependent.
To minimize the non-camera contributors:
Use a stiff, low-vibration mount so the camera-to-flange transform stays constant under load and motion. A stiff material and a short, compact bracket both reduce deflection and help keep that transform constant. See 手臂安装方案的机械注意事项.
Perform warm-up, in-field correction, and hand-eye calibration carefully, and re-verify them after any mechanical change.
Capture statically (robot stopped during exposure) rather than while moving.
Ensure sufficient overlap between adjacent captures so local point cloud registration can correct residual misalignment.
Using Multi-Camera Calibration (Multiple Stationary Cameras)
When multiple Zivid cameras are mounted in fixed positions around the scene, you can calibrate them against each other once, then use the resulting transformation matrices to stitch every capture from then on. This is the right choice when:
The cameras are stationary relative to the scene.
You want to capture all viewpoints simultaneously (or in quick succession) rather than moving a single camera.
The workflow has two parts:
版本历史记录
SDK |
变更 |
|---|---|
2.17.0 |
为 C# 添加了对本地点云配准的支持。 |