如何验证手眼标定
完成手眼标定后,可以使用多种方法来验证所得变换矩阵是否正确,并满足精度要求。
残差验证
良好的 手眼标定的残差 表明手眼标定已成功收敛到解决方案。
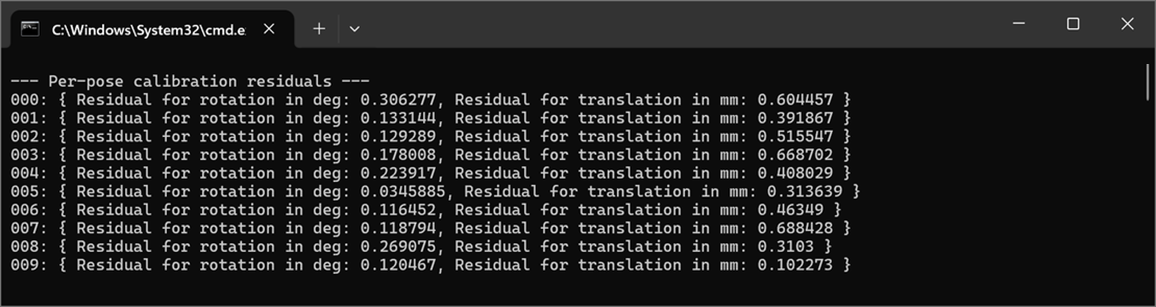
对于小型机器人,我们预计残差在亚毫米范围内;而对于大型机器人,残差则在毫米范围内。至于残差的旋转分量,我们预计其在亚度范围内。
备注
良好的残差并不能保证手眼标定准确。此外,残差并非机器人定位预期精度的直接衡量指标。因此,使用其他方法验证手眼标定结果至关重要。
触碰测试验证(推荐)
推荐的手眼标定验证方法是将 标定对象 放置在场景中,然后移动机器人进行触碰测试。该方法包括捕获并检测标定对象,计算其位姿,然后移动机器人(配备指向性手眼验证工具)使其触碰对象上的特定点。之后,可以通过检查工具尖端与目标点的接近程度来直观地评估机器人移动到目标位姿的准确度。工具尖端越接近目标点,手眼标定效果越好。
可用于进行触碰测试的工具:
手眼图形用户界面(推荐)
Python脚本
详细步骤请参见:
由于这是一项物理测试,需要使用末端执行器进行验证,因此并非人人都能轻松掌握。请继续阅读,了解更简便的验证方法。
投影验证
Zivid 相机内置投影仪,可以将任意图像投射到实际场景中。为了进行手眼标定验证,相机可以将圆形图像投射到 Zivid 标定板已知的棋盘格角点上。该验证方法利用手眼变换矩阵和已知的机器人位姿,计算标定对象在相机视野中的位置。然后,系统将这些预测位置投影回实际场景。
要运行此验证方法,请参阅:
手眼图形用户界面: 投影验证
如果绿线与棋盘格的实际角点对齐良好,则手眼标定准确。投影验证应格外谨慎,因为即使手眼标定不正确,投影误差也可能看起来可以接受。
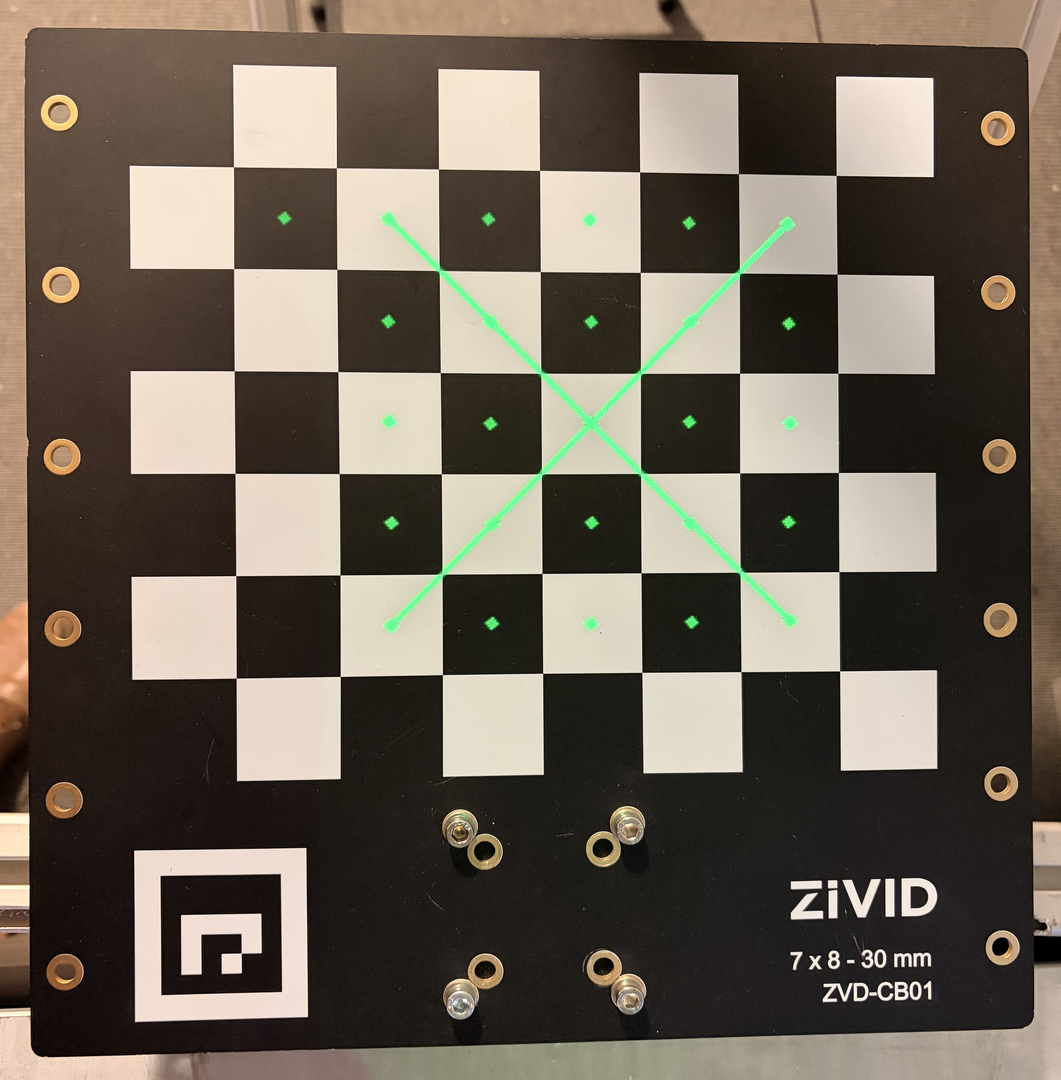 投影效果良好
投影效果良好
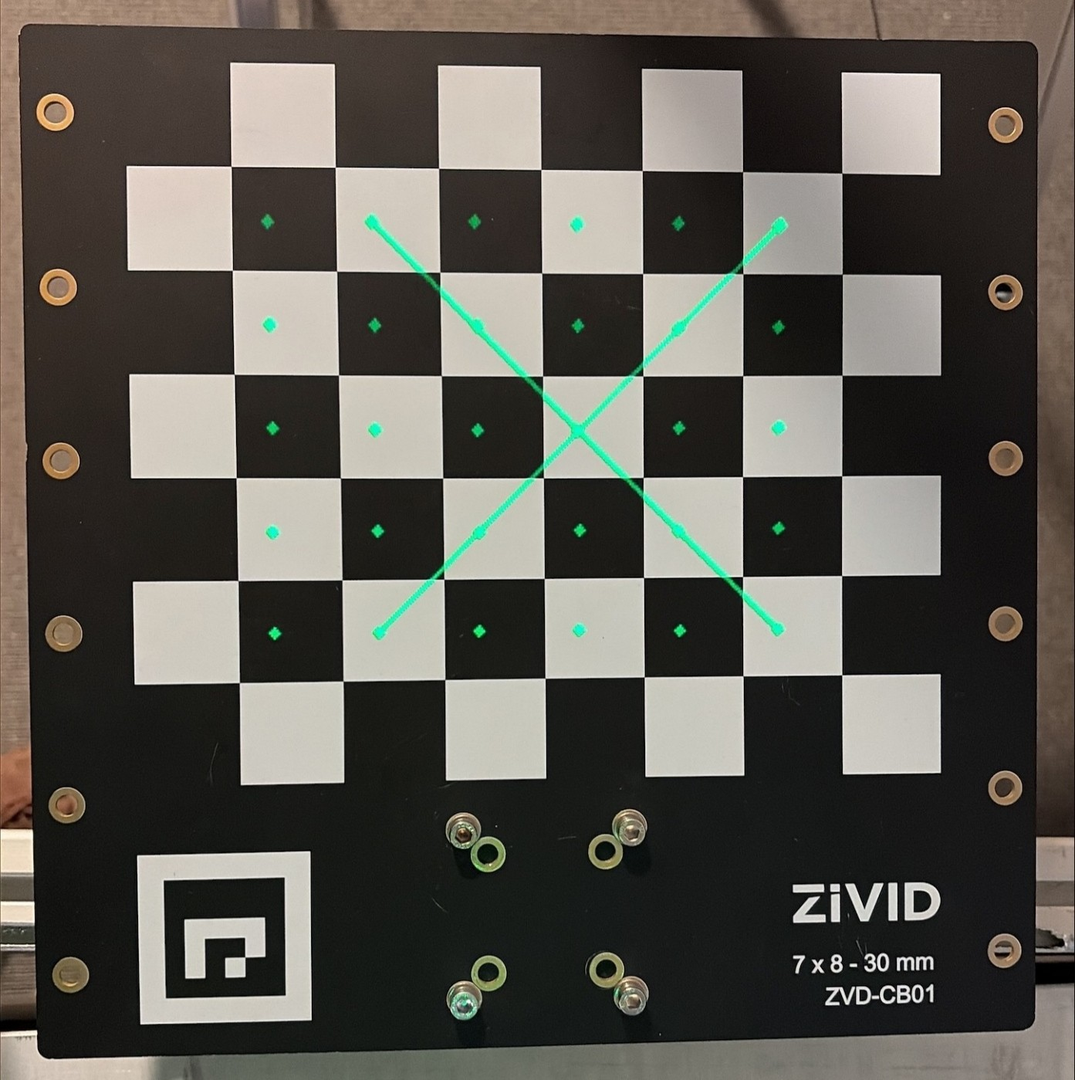 投影效果欠佳
投影效果欠佳
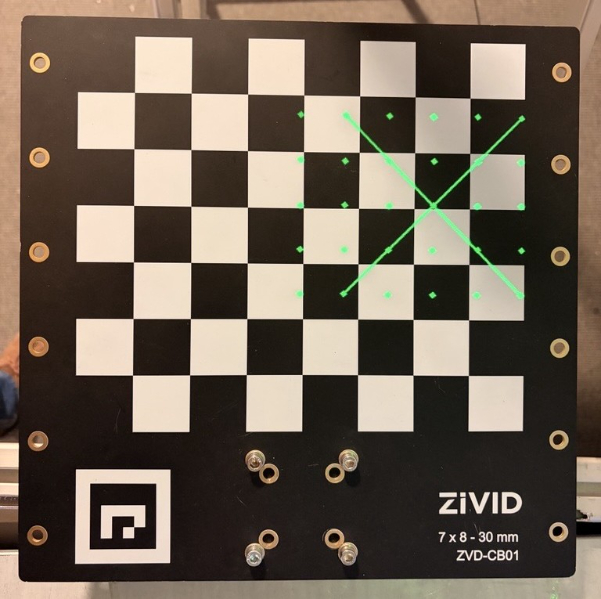 投影结果极差
投影结果极差
拼接验证
拼接手眼标定结果也是验证标定效果的有效方法。数据集中的所有点云都可以利用手眼标定变换转换到机器人基坐标系,并以重叠方式显示。这有助于我们了解机器人位姿和手眼变换的精度。手眼标定越精确,点云重叠部分越多,棋盘格图案也越清晰。
要运行此验证方法,请参阅:
手眼图形用户界面 拼接验证
Python 示例: verify_hand_eye_with_visualization.py
后续步骤
如果您的验证结果令人满意,请查看:
如果您对手眼标定结果不满意,请查看以下文章之一: