手眼标定的流程
收集标定所需数据包括以下步骤:
机器人执行一系列区别足够大的动作(无论是人工操作还是自动规划)。
每次移动后,相机都需要捕获一副标定对象的图像。
从相机图像中提取标定物体的位姿。
从机器人控制器获取相应的机器人位姿。
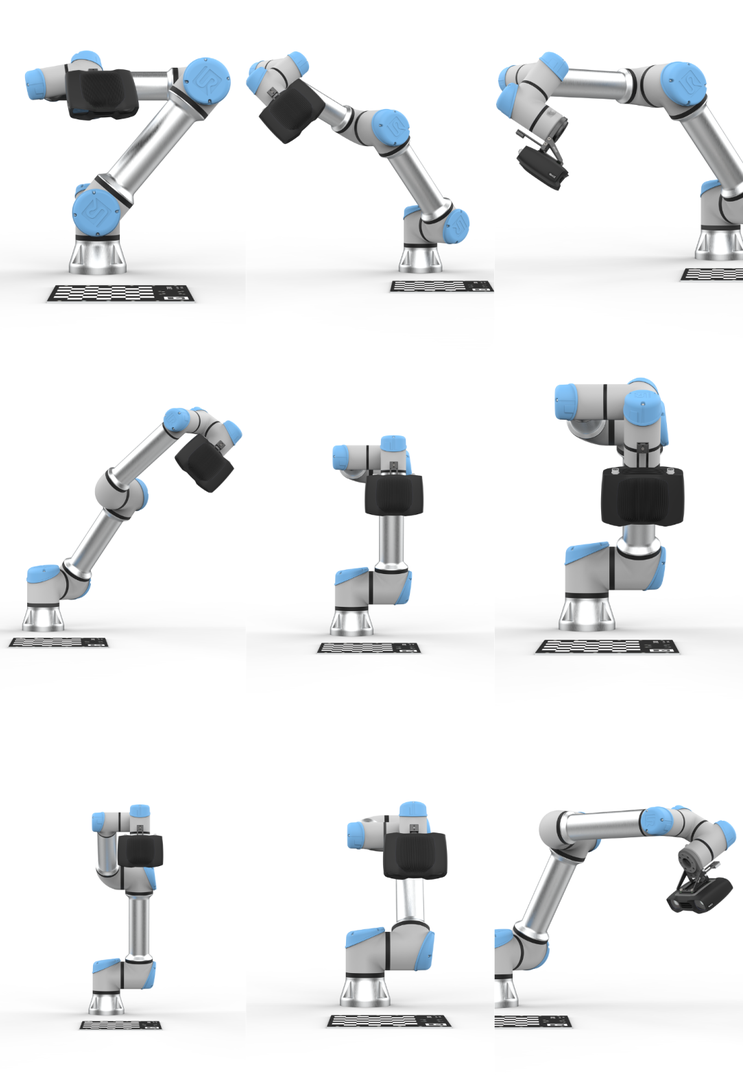
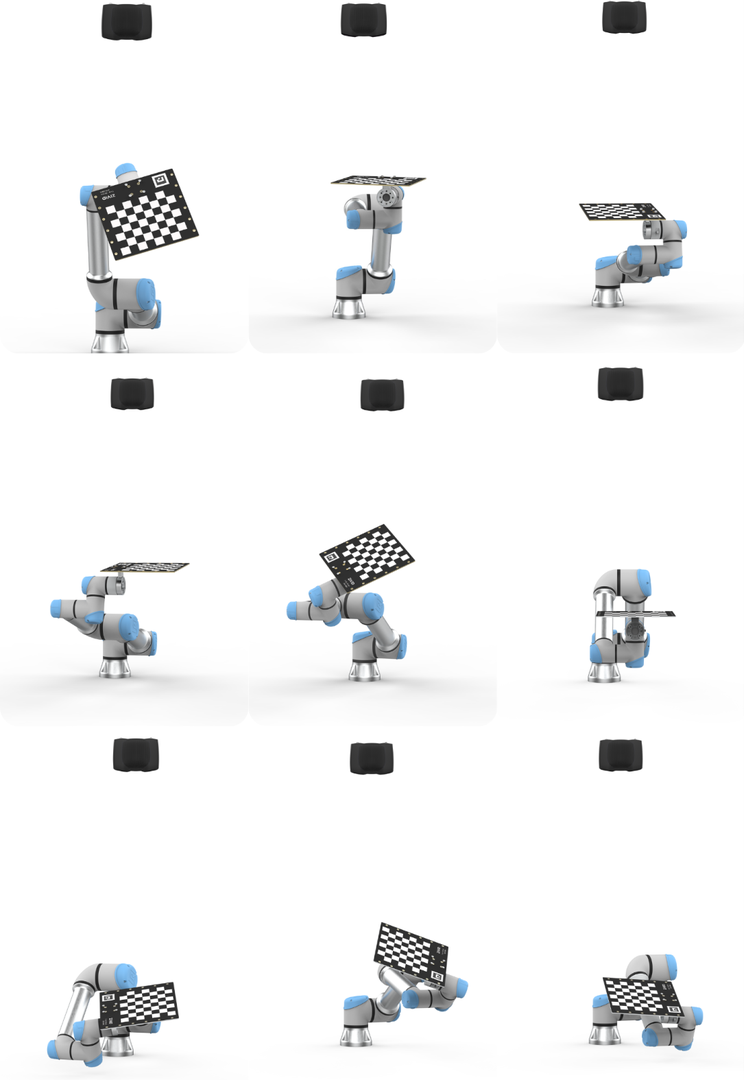
下图展示了 eye-to-hand 和 eye-in-hand 系统的成像位姿和标定对象图像数据集。
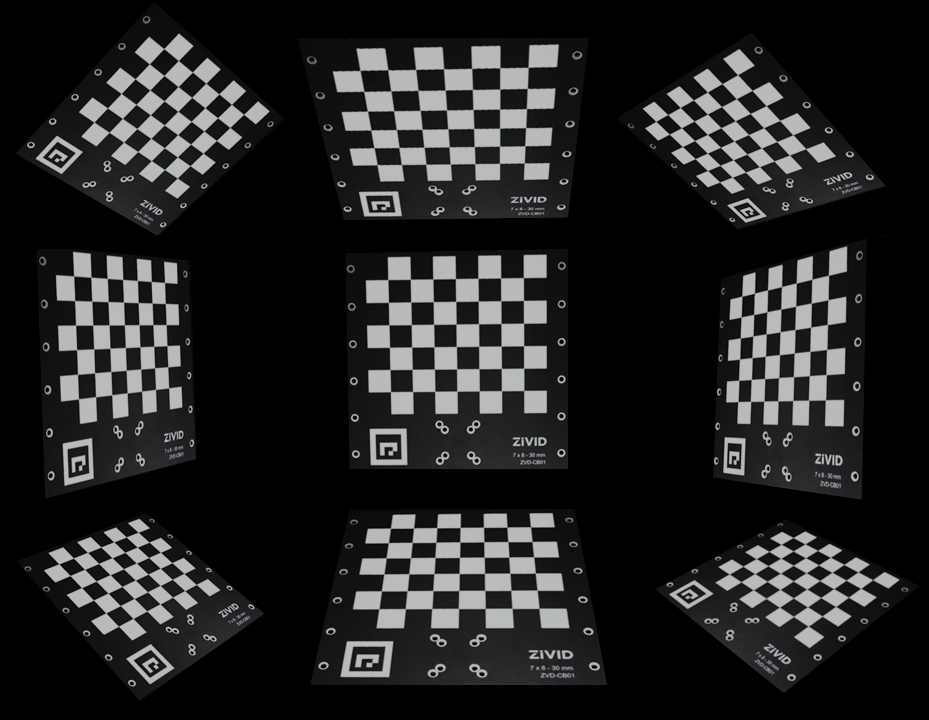
下图展示了相机看到的标定对象。
随后,手眼标定算法的任务便是求解齐次变换方程,以估算标定对象位置的旋转与平移分量,以及手眼变换的相应分量。详细的数学解释请参阅 手眼标定解决方案 。
继续阅读 手眼标定的残差 。