Touch Test Fails (Poor Robot Positioning Accuracy) after Mild Collision
Problem
After a mild collision, your robot positioning accuracy is compromised. This is observed as offsets in object picking/placement and failed touch tests, where the robot’s tool tip does not land on the expected point.
Before the collision, your hand-eye calibration results were good, and the touch test passed successfully.
Hand-eye matrix |
Calibration residuals |
Projection verification |
Touch test |
|---|---|---|---|
Reasonable |
Good |
Good |
Good → Collision → Bad |
Example of good hand-eye results
Hand-Eye Calibration Matrix
0.999 |
-0.002 |
0.0412 |
-55.598 |
0.001 |
0.999 |
0.0283 |
-90.654 |
-0.041 |
-0.028 |
0.998 |
129.044 |
0 |
0 |
0 |
1 |
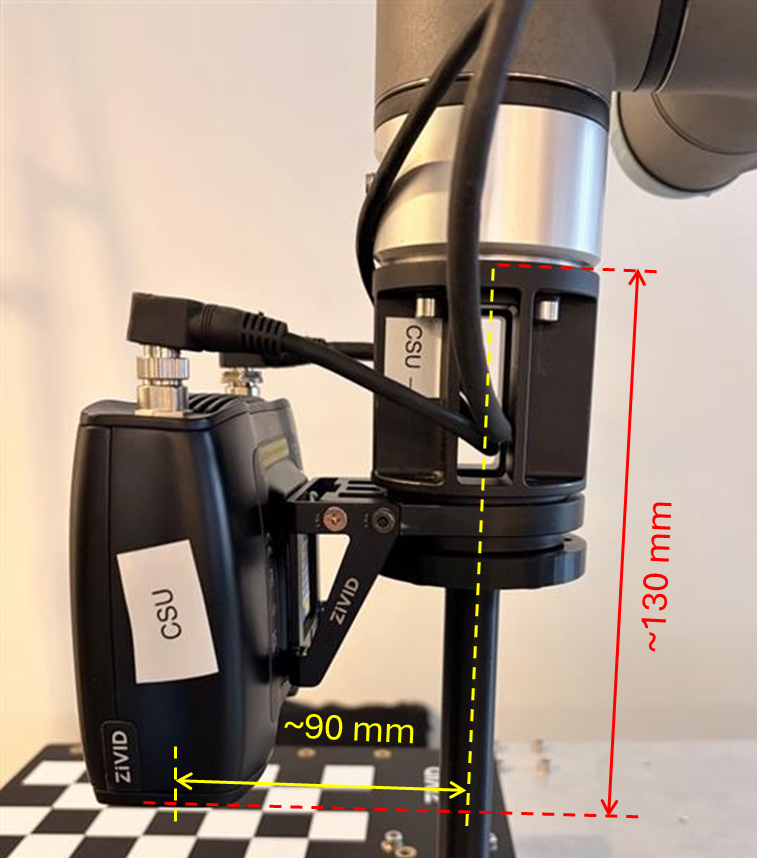
The Hand-Eye Calibration Matrix appears reasonable and is consistent with what one would expect from rough manual measurements (see image below).
Residuals
The calibration residuals are within an acceptable range, indicating that the optimization has converged successfully. For smaller robots, we expect the residuals to in the sub-millimeter range, while for larger robots, the residuals can be in the millimeter range. As for the rotational component of the residuals, we expect them to be in the sub-degree range.
N (Poses) |
Rotation avg (deg) |
Rotation max (deg) |
Translation avg (mm) |
Translation max (mm) |
|---|---|---|---|---|
10 |
0.021 |
0.042 |
0.109 |
0.172 |
Pose |
Rotation (deg) |
Translation (mm) |
|---|---|---|
1 |
0.017292 |
0.163 |
2 |
0.008218 |
0.135 |
3 |
0.028 |
0.172 |
4 |
0.009 |
0.053 |
5 |
0.042 |
0.080 |
6 |
0.008 |
0.098 |
7 |
0.022 |
0.138 |
8 |
0.025 |
0.077 |
9 |
0.036 |
0.125 |
10 |
0.013 |
0.048 |
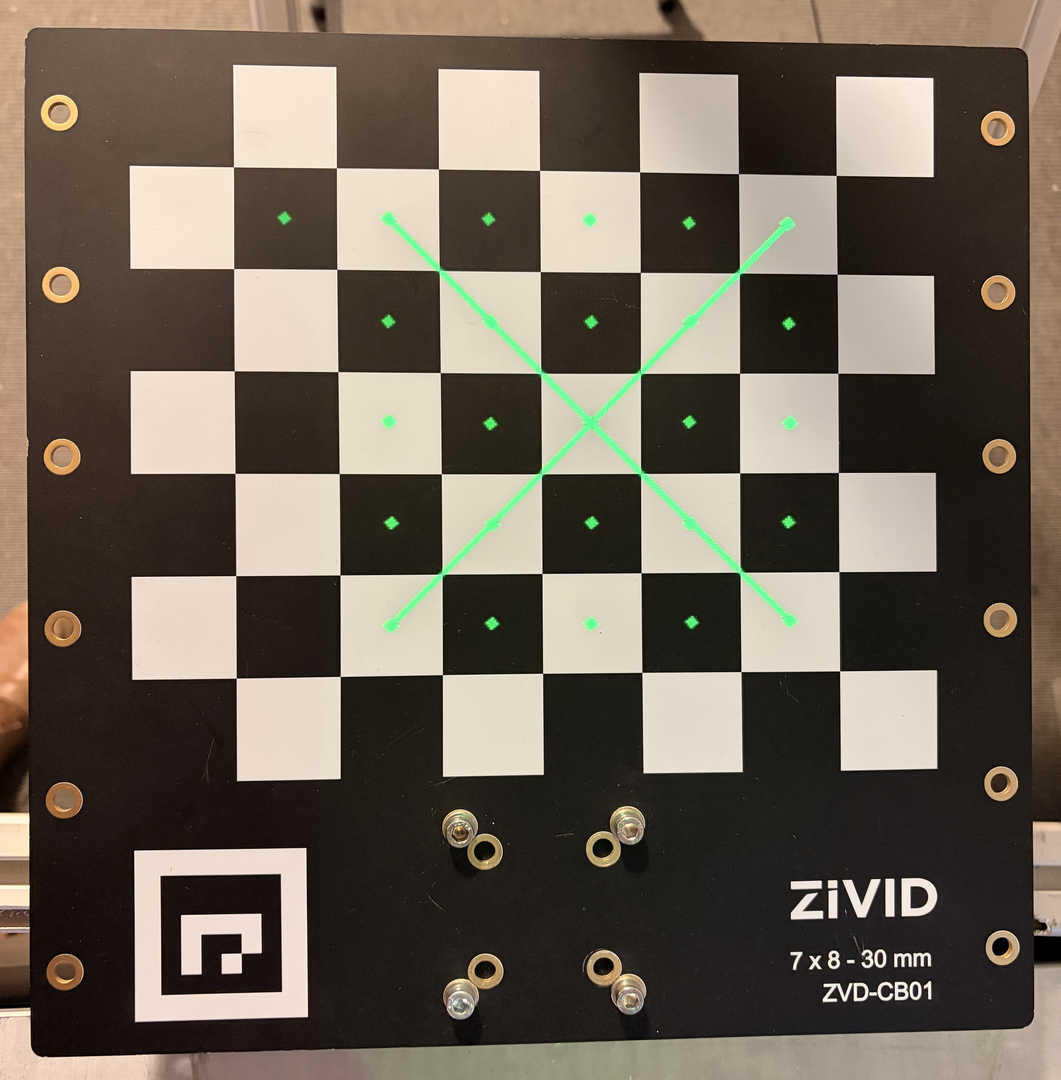
Verification using projection also passes, indicating that the hand-eye transformation is correct and accurate.
Potential Cause
Mild collisions can cause slight shifts in the robot’s joints or end-effector, which may not be severe enough to cause visible damage but can still affect the accuracy of the hand-eye calibration. This can result in failed touch tests and inaccurate robot positioning.
Potential Solution
Warm-up the camera and perform Infield Correction.
Repeat the Hand-Eye Calibration using the initial dataset.
Verify the Hand-Eye Calibration results (matrix, residuals, projection).
Re-run the touch test.