相互反射产生的波纹现象
问题
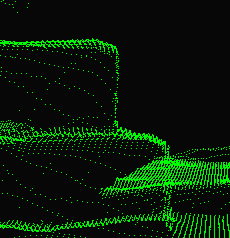
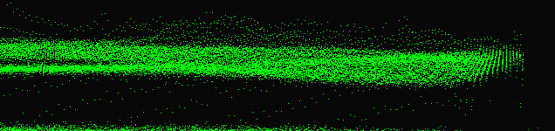
由于点云中的波纹或波浪图案,物体形状显得扭曲失真。
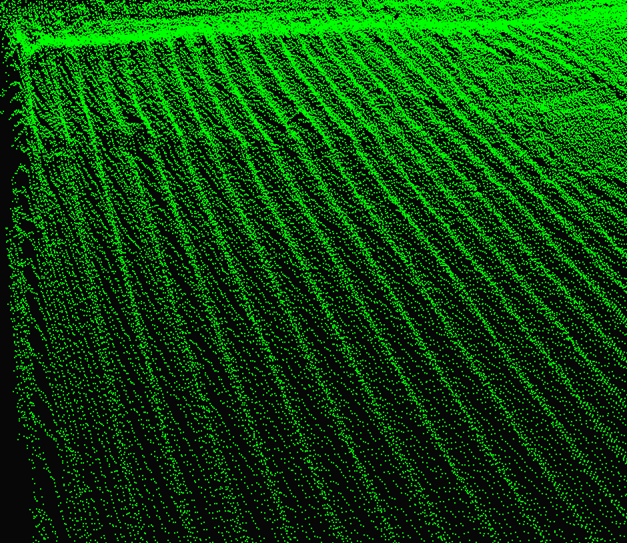 对于反光材质的料箱,由于箱壁与箱底和物体之间的相互反射,可能会出现波纹失真。
对于反光材质的料箱,由于箱壁与箱底和物体之间的相互反射,可能会出现波纹失真。
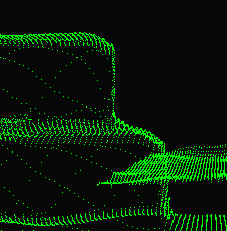
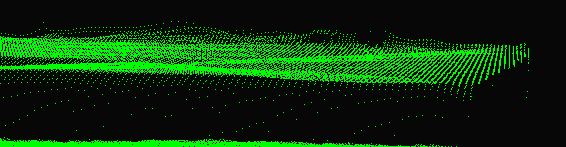
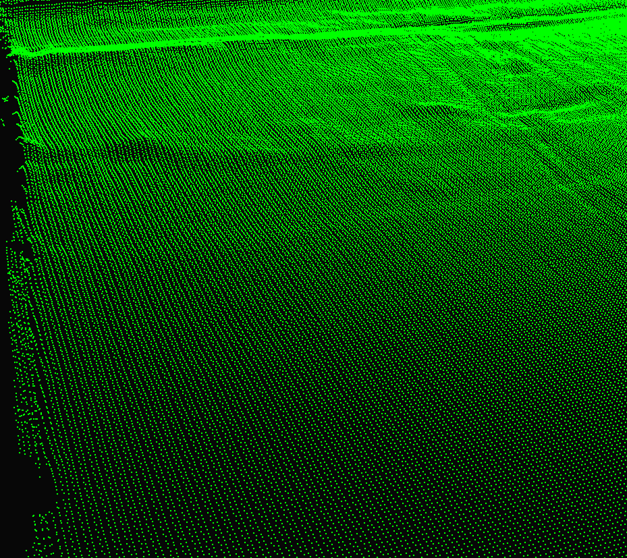 使用高斯滤波器抑制箱底的波纹现象(在这种情况下可以将 sigma 设置为 2)。
使用高斯滤波器抑制箱底的波纹现象(在这种情况下可以将 sigma 设置为 2)。
潜在原因
- 相互反射
Zivid 相机的投影仪光线旨在直接从工件反射回相机。然而,光线也会从闪亮的箱壁或附近的物体上反射,产生干扰直接信号的额外反射。这种现象称为相互反射,可能导致点云中出现波纹或波浪。
- 环境光干扰
点云中的波纹也可能是由环境光干扰引起的;请参阅如何处理 环境光干扰产生的波纹 。
潜在解决方案
确定问题
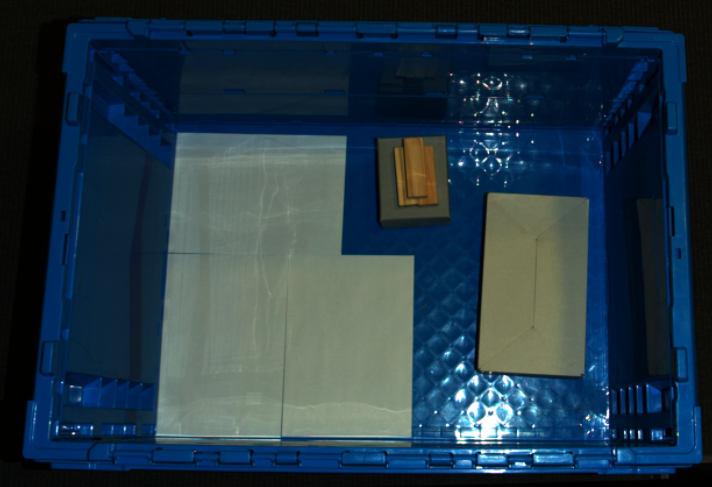
检查 2D 图像是否有光反射的迹象,尤其是从闪亮的箱壁反射到物体上的光反射。例如,在下图中,光线清楚地从箱壁反射到箱底的信封上。这种相互反射会产生涟漪效果;请参见左上角的图像。
选择正确的视觉引擎
Stripe Engine 、 Sage Engine 或 Omni Engine :这些引擎本身会减少波纹干扰,因此可能不需要进一步抑制。
Phase Engine :如果速度是优先考虑因素,请使用此引擎,但更容易出现波纹干扰,如果仍出现干扰,请按照下面步骤进行抑制处理。
调整平滑滤波器
Noise Filter(噪声过滤器) Suppression(抑制):启用此过滤器并检查波纹是否被消除或减少,如上图所示。
Gaussian Smoothing(高斯平滑) :如果波纹现象持续存在,则逐渐增加
sigma值,直到波纹消除或充分减少。
评估对物体形状的影响
应用过滤器后,仔细评估平滑对场景中的边缘和形状的影响。下图说明了此场景中的平滑效果。
确保对象保持完整且可供应用程序识别。例如,确定拾取姿势或执行基于 CAD 的匹配的算法依赖于清晰的边缘和准确的形状。如果平滑会扭曲边缘或使形状变形过多,请减少高斯过滤器
sigma或关闭噪声过滤器Suppression以找到平衡。此过滤器对于保留高对比度物体(例如闪亮的金属圆柱体)的形状至关重要,这些物体容易产生 对比度失真伪影 。在这种情况下,请保持启用该过滤器。对于没有对比度失真问题的场景,请禁用此滤镜以最大限度地减少不必要的平滑。
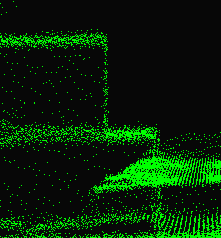 上表面和相邻表面上都有数据点的边缘的示例。
上表面和相邻表面上都有数据点的边缘的示例。
 当使用高斯过滤器抑制纹波时,这种类型的边缘会被平滑。
当使用高斯过滤器抑制纹波时,这种类型的边缘会被平滑。
 当高斯过滤器和对比度失真过滤器组合时,边缘更加平滑。
当高斯过滤器和对比度失真过滤器组合时,边缘更加平滑。
 由于边缘相对于投影仪的位置,因此该边缘的顶面上仅有数据点。
由于边缘相对于投影仪的位置,因此该边缘的顶面上仅有数据点。
 当使用高斯过滤器抑制纹波时,这种类型的边缘会被最低限度地平滑。
当使用高斯过滤器抑制纹波时,这种类型的边缘会被最低限度地平滑。