2D 边缘检测不良
问题
依赖于二维边缘检测的机器视觉算法(例如二维模板匹配和条形码扫描)的效果不佳。
原因
分辨率过低
Zivid 2 相机配备 2.3 MP 图像传感器。此分辨率可能不足以满足需要精确边缘检测或精细细节的应用,例如 2D 模板匹配或条形码扫描。
传统的去马赛克算法
Zivid 2 相机以及 Zivid 2+ M130、M60 和 L110 相机中的去马赛克算法可能会引入图像伪影,包括:
RGB 混叠:在高对比度边缘(例如黑白线)之间出现不应存在的绿色或粉红色像素。
错误的插值:对像素数据的错误解释会产生不准确的边缘细节。
拉链效果:沿对角线或曲线出现阶梯状图案,进一步降低边缘质量。
这些因素共同限制了机器视觉系统的性能,特别是在需要高精度和清晰图像特征的应用中。
可能的解决方案
我们建议升级到 Zivid 2+ MR30、MR60 或 LR110 相机以获得最佳效果。这些型号可消除 RGB 混叠并提供最清晰、最可靠的 2D 图像质量。
升级至 Zivid 2+
增强型图像传感器:
Zivid 2+ 相机配备 5MP 图像传感器,可捕捉更精细的细节。更多像素可更清晰地描述边缘等图像特征,在需要精确度的应用中提供竞争优势。
改进的去马赛克算法:
Zivid 2+ 中的新去马赛克算法可确保出色的边缘和精细细节。此增强功能可显著减少伪影,使图像更可靠,更适合分析。
消除 RGB 混叠:
与 Zivid 2 相机不同,部分 Zivid 2+ 相机(特别是 MR30、MR60 和 LR110)经过精心设计,可避免 RGB 混叠。因此,黑白线条之间不会出现多余的绿色或粉红色像素,从而确保色彩再现的准确性。
性能比较:Zivid 2 与 Zivid 2+
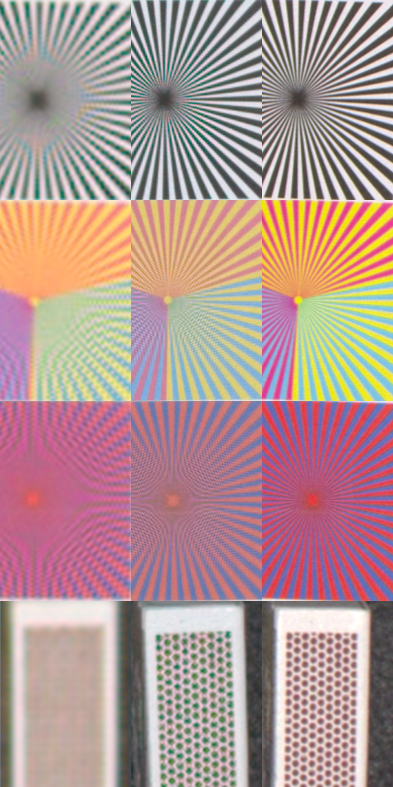
下面的图片展示了这些改进:
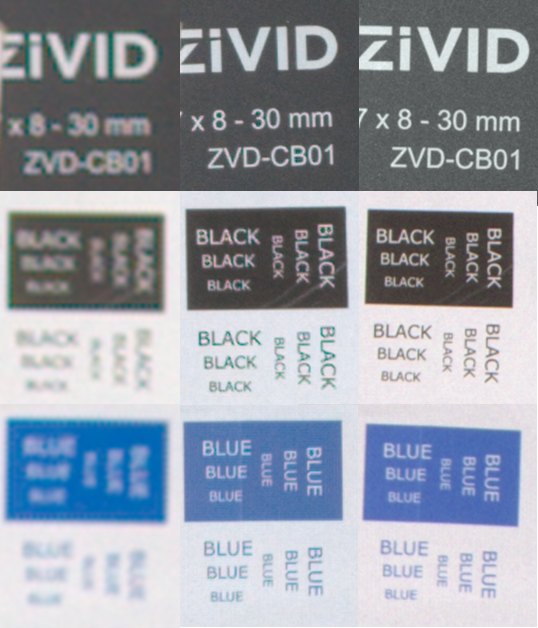
左:Zivid 2
中锋:Zivid 2+ M130
右:Zivid 2+ MR130
所有图像均在 1.3 米的距离处拍摄。
条形码线条
Zivid 2:条形码线条看起来很模糊并与相邻的线条混合,通常会显示出明显的拉链效果。
Zivid 2+ M130:条形码线条明显更清晰,混合减少,但线条之间有明显的 RGB 混叠。
Zivid 2+ MR130:条形码线条最清晰,没有 RGB 混叠。黑白过渡清晰准确。

文本可读性
Zivid 2:文本模糊,导致字符更难阅读或无法阅读。
Zivid 2+ M130:文本更清晰,但边缘有明显的 RGB 混叠。
Zivid 2+ MR130:文本边缘清晰明快,无 RGB 混叠伪影。
色彩图案
Zivid 2:色彩图案模糊,并且经常因 RGB 混叠伪影而受到扭曲。
Zivid 2+ M130:色彩图案更清晰,保存得更好,但仍然存在 RGB 混叠的问题。
Zivid 2+ MR130:提供最佳效果,确保彩色图像准确且无伪影。