优化彩色图像
介绍
本教程旨在帮助您优化Zivid相机捕获的彩色图像的质量。我们将首先介绍如何使用获得良好颜色信息的基本工具:调整采集和颜色设置。然后我们将解决最常见的挑战(HDR中的光晕/过度饱和现象和颜色不一致性),并就如何克服这些问题提供我们的建议。
小技巧
与 Zivid 2 相机相比,Zivid 3 和 Zivid 2+ 相机具有更高的分辨率和改进的彩色图像算法。因此,Zivid 3 和 Zivid 2+ 相机能够生成更高质量的 2D 彩色图像。
调整采集设置
彩色图像的质量取决于 Acquisition Settings(采集设置)- 2D 。应调整采集参数,确保感兴趣区域的像素值远离噪声基底(noise floor),同时避免图像中出现像素饱和,尤其是在感兴趣区域。一个实用的经验法则是:让感兴趣区域的像素值尽可能高,但不要达到饱和状态,即 RGB 值应接近但不等于 255。这样可能会导致部分非关键区域像素饱和,但关键区域仍能获得良好曝光。在此情况下,请确保您的图像处理算法能够容忍一定程度的饱和。如需了解光强度如何转换为像素值,请参阅 相机捕获中可检测到的光强度 。
为了优化彩色图像的采集设置,您可以使用 Zivid Studio 中的 2D 视图和直方图,如下图所示。将鼠标光标悬停在感兴趣区域(图像中的红色十字)上方,即可在左下角显示像素的 RGB 值。
该像素的 RGB 值将在直方图视图中与其他具有相似 RGB 值的像素归入同一区间。如上图所示,像素 (783, 526) 的 RGB 值为:
红色值为 224
绿色值为 238
蓝色值为 215
这些RGB值表明该像素位于直方图的右上半部分,因此被认为是一个良好的像素。然而,我们也可以从直方图中看出,图像中有很多饱和像素(RGB值为255),这表明某些像素过曝了。
小心
要使用直方图作为调整采集设置的工具,您必须每次仅评估单次采集,并将 Color Mode 设置为 UseFirstAcquisition 或 Automatic 。此外,您还需将 Gamma 和 Color Balance 增益设置为 1.0。
这是因为默认的 Color Mode 为 Automatic ,这与使用不同采集设置的多采集HDR图像的 ToneMapping 设置相同。色调映射会修改像素值。 Gamma 和 Color Balance 设置也会改变像素值。
在调整采集设置以获得良好曝光的图像时,请考虑不同的采集设置会如何影响彩色图像的质量。
Exposure Time(曝光时间)和 Projector Brightness(投影仪亮度)
曝光时间和投影仪亮度不会影响彩色图像质量。我们建议使用投影仪的最大亮度值,这样可以缩短曝光时间,从而加快 2D 图像采集速度。前提是您的图像没有出现饱和现象,如上所述。
Aperture(光圈)
备注
Zivid 3 没有可调节光圈。以下关于光圈调节的信息仅适用于 Zivid 2 和 Zivid 2+ 相机。
正确的光圈值(f-number)对于避免彩色图像模糊至关重要;参见下图。一个实用的经验法则是:如果工作距离处于最佳范围内,建议使用较低的 f 值(最高至 4.0);如果相机位于最佳范围之外,则可尝试使用更高的 f 值,例如 5.6 或 8.0。如需更详细的说明和指导,请参阅: 焦深 和 Depth of Focus Calculator 。
 使用合适光圈设置的单次采集
使用合适光圈设置的单次采集
 使用了不合适光圈设置的单次采集
使用了不合适光圈设置的单次采集
备注
上面的图像是在最佳成像距离之外拍摄的,以强调大光圈值时的失焦效果,而在最佳范围内拍摄时,图像不会如此模糊。
Gain(增益)
我们建议使用较低的增益值,例如1-2,因为高增益值会增加图像噪声(粒度)水平,从而降低2D图像质量;见下图。
增益设置为1的单次采集捕获
 增益设置为16的单次采集捕获
增益设置为16的单次采集捕获
调整颜色设置
除了采集设置外,彩色图像质量还取决于伽玛值(Gamma)、色彩平衡( Color Balance)和色彩模式(Color Mode )设置。本节旨在深入探讨如何优化这些设置,以获得理想的彩色图像色彩质量。
Gamma
相机对亮度的编码与人眼不同。人眼侧重于光谱的较暗端,相机则以线性比例编码亮度。为了补偿这种影响,gamma校正被应用于使图像变暗或变亮,使其更接近人类的感知。
Gamma值越低,场景会显得越亮。如果增加Gamma值,则场景会显得更暗。
 使用 Gamma 设置为 0.6 拍摄的图像
使用 Gamma 设置为 0.6 拍摄的图像
 使用 Gamma 设置为 1.3 拍摄的图像
使用 Gamma 设置为 1.3 拍摄的图像
是否需要gamma校正来优化图像质量用于机器视觉算法是有疑问的。尽管如此,它仍然可以帮助我们评估彩色图像质量的某些方面,例如焦点和颗粒/噪声水平。
有关示例的实现,请查看 Gamma校正。该教程展示了如何使用可配置的gamma校正捕获2D图像。
Color Balance(色彩平衡)
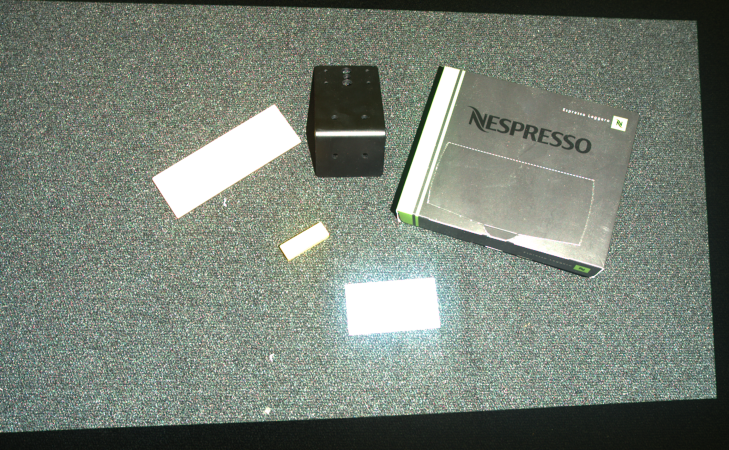
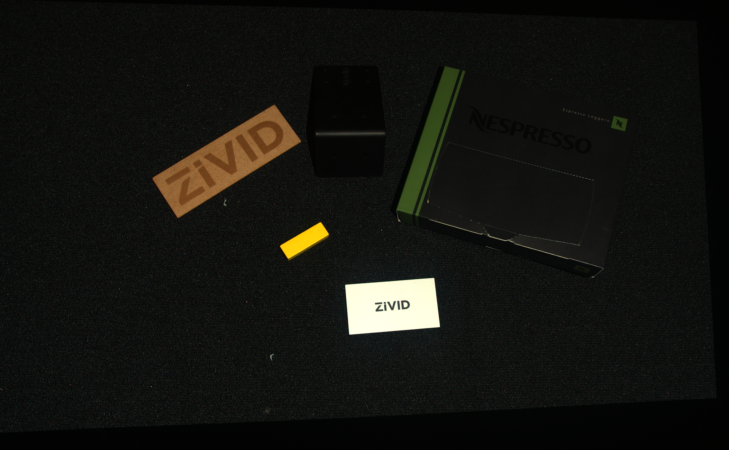
Zivid 3 以及 Zivid 2+ MR130、MR60 和 LR110 相机内置了自动白平衡功能,因此强烈的或非白色的环境光对彩色图像中的 RGB 值影响很小。这使得在这些相机型号上无需额外运行白平衡算法。
下图显示了在不同环境光条件下使用 Zivid 2+ MR130 拍摄的二维彩色图像的细节。
300 LUX |
1000 LUX |
2000 LUX |
|
3200K |
|
||
5000K |
|||
6500K |
|||

如果您使用的是 Zivid 3 或 Zivid 2+ MR130、MR60、LR110 相机,可以跳过本节其余内容。本节剩余部分仅适用于其他 Zivid 相机型号。
环境光的 色温 会影响彩色图像的显示效果。存在两种默认的颜色平衡设置:使用和不使用投影仪时的设置。当投影仪亮度设置为 0 或关闭时,颜色平衡校准为 4500 K,这在工业环境中是典型的。对于高于 0 的投影仪亮度值,颜色平衡则根据投影仪光源的色温进行校准。您可以通过调整红色、绿色和蓝色通道的数字增益,使彩色图像看起来更加自然。下面,您可以对比一张图像在颜色平衡前后的效果。
备注
Zivid相机的色彩平衡增益值范围在1.0到8.0之间。

在强光且环境光变化较大的情况下,执行色彩平衡操作非常有益。关于具体实现方法,请参阅教程 调整色彩平衡 。该教程演示了如何通过循环拍摄白色表面(如一张纸、墙面等)来对 2D 图像进行白平衡校正。
Color Mode(颜色模式)
颜色模式设置控制了如何计算彩色图像。颜色模式设置可设为以下模式:
ToneMappingAutomatic
ToneMapping 功能使用了所有采集项来创建一个合并和标准化的彩色图像。对于多采集 HDR 捕获,捕获图像的动态范围通常高于 8 位彩色图像范围。色调映射将通过应用缩放因子将 HDR 颜色数据映射到 8 位颜色输出范围。色调映射还可用于单采集捕获,以将捕获的彩色图像标准化为完整的 8 位输出。使用 ToneMapping 时,如果您移动、添加或移除场景中的对象,颜色值在重复捕获中可能会不一致。
Automatic是默认设置。在进行具有不同采集设置的多次采集HDR时,
Automatic等同于ToneMapping。
对于单次采集捕获,色调映射可用于将较暗的图像变亮。
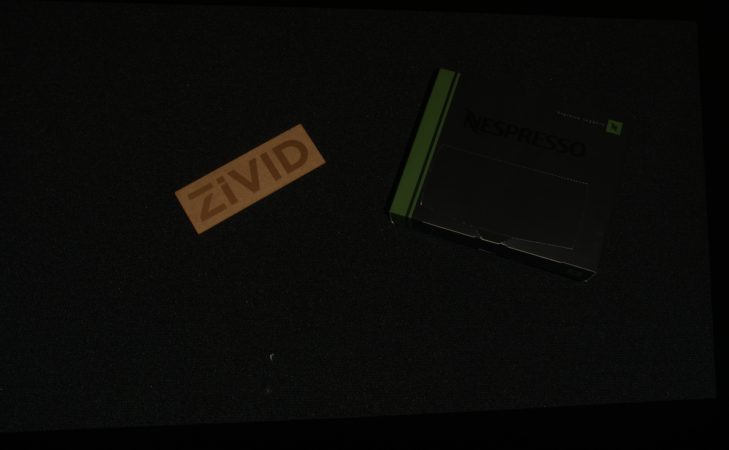 将色彩模式设置为自动(Automatic)(即无色调映射)的单次采集
将色彩模式设置为自动(Automatic)(即无色调映射)的单次采集
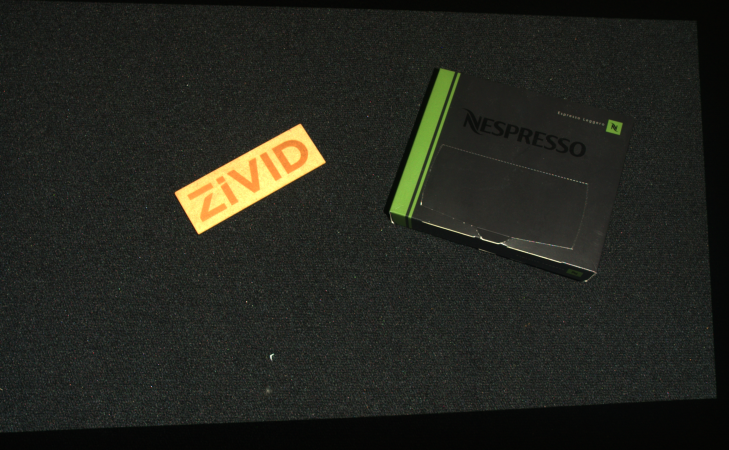 将色彩模式设置为色调映射 (ToneMapping) 的单次采集
将色彩模式设置为色调映射 (ToneMapping) 的单次采集
对于多采集HDR,色调映射可用于将高动态范围颜色映射到更有限的动态输出范围。
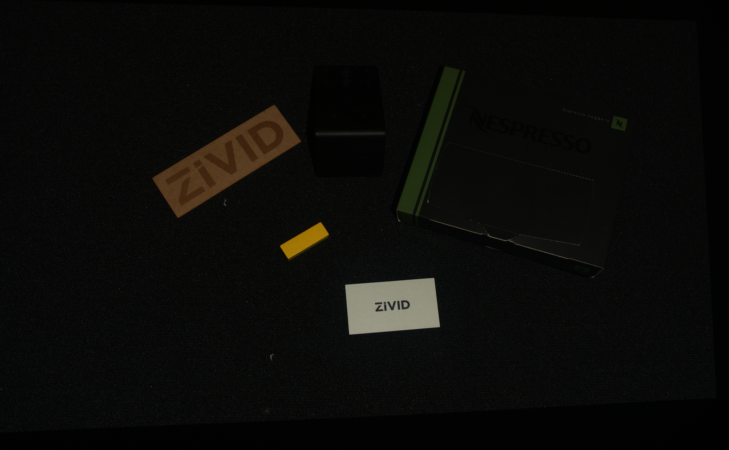 在色彩模式设置为自动(无色调映射)的情况下,对三次 HDR 采集中的第一次进行单次采集
在色彩模式设置为自动(无色调映射)的情况下,对三次 HDR 采集中的第一次进行单次采集
 在色彩模式设置为自动(无色调映射)的情况下,对三次 HDR 采集中的第二次进行单次采集
在色彩模式设置为自动(无色调映射)的情况下,对三次 HDR 采集中的第二次进行单次采集
 在色彩模式设置为自动(无色调映射)的情况下,对三次 HDR 采集中的第三次进行单次采集
在色彩模式设置为自动(无色调映射)的情况下,对三次 HDR 采集中的第三次进行单次采集
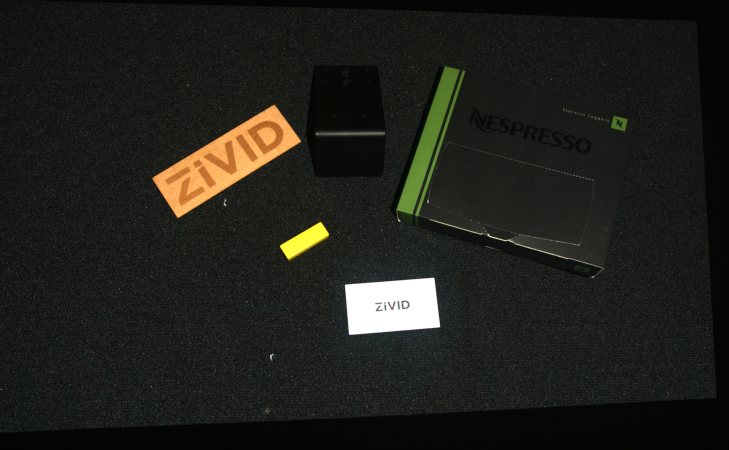
 Color Mode设置为ToneMapping或Automatic的具有三个采集项的HDR
Color Mode设置为ToneMapping或Automatic的具有三个采集项的HDR
查看如何使用Zivid SDK配置数据处理的设置,包括Gamma、Color Balance和Color Mode:

std::cout << "Configuring settings for capture:" << std::endl;
Zivid::Settings2D settings2D{
Zivid::Settings2D::Sampling::Color::rgb,
Zivid::Settings2D::Sampling::Pixel::all,
Zivid::Settings2D::Sampling::Interval::Enabled::no,
Zivid::Settings2D::Sampling::Interval::Duration{ microseconds{ 10000 } },
Zivid::Settings2D::Processing::Color::Balance::Blue{ 1.0 },
Zivid::Settings2D::Processing::Color::Balance::Green{ 1.0 },
Zivid::Settings2D::Processing::Color::Balance::Red{ 1.0 },
Zivid::Settings2D::Processing::Color::Gamma{ 1.0 },
Zivid::Settings2D::Processing::Color::Experimental::Mode::automatic,
};
Console.WriteLine("Configuring settings for capture:");
var settings2D = new Zivid.NET.Settings2D()
{
Sampling =
{
Color = Zivid.NET.Settings2D.SamplingGroup.ColorOption.Rgb,
Pixel = Zivid.NET.Settings2D.SamplingGroup.PixelOption.All,
Interval =
{
Enabled = false,
Duration = Duration.FromMicroseconds(10000),
},
},
Processing =
{
Color =
{
Balance =
{
Blue = 1.0,
Green = 1.0,
Red = 1.0,
},
Gamma = 1.0,
Experimental = { Mode = Zivid.NET.Settings2D.ProcessingGroup.ColorGroup.ExperimentalGroup.ModeOption.Automatic },
},
},
};
print("Configuring settings for capture:")
settings_2d = zivid.Settings2D()
settings_2d.sampling.color = zivid.Settings2D.Sampling.Color.rgb
settings_2d.sampling.pixel = zivid.Settings2D.Sampling.Pixel.all
settings_2d.sampling.interval.enabled = False
settings_2d.sampling.interval.duration = timedelta(microseconds=10000)
settings_2d.processing.color.balance.red = 1.0
settings_2d.processing.color.balance.blue = 1.0
settings_2d.processing.color.balance.green = 1.0
settings_2d.processing.color.gamma = 1.0
settings_2d.processing.color.experimental.mode = zivid.Settings2D.Processing.Color.Experimental.Mode.automatic
故障排除
如果您遇到任何与彩色图像有关的问题,请查看 视觉 故障排除文章。
进一步阅读
继续阅读 处理高光和闪亮的物体 。
版本历史记录
SDK |
变更 |
|---|---|
2.17.0 |
新增对 Zivid 3 XL250 的支持。 |