相机捕获中可检测到的光强度
介绍
相机与我们的眼睛非常相似,因为它将光子流转换为包含信息的图像。相机中的成像传感器包含一个像素网格。其中每个像素都对在读取阶段或曝光过程中接收的光子进行计数,并输出强度分数。
相机的动态范围定义了从黑色到白色的最小和最大可测量光强度之间的比率,是摄影中的一个基本属性。
成像传感器中的光强度
对于单次图像采集,相机传感器会测量特定范围内每个像素的光强度。典型的传感器可以检测到 256 到 4096 个光强度级别,相当于每个像素 8 到 12 位数据。
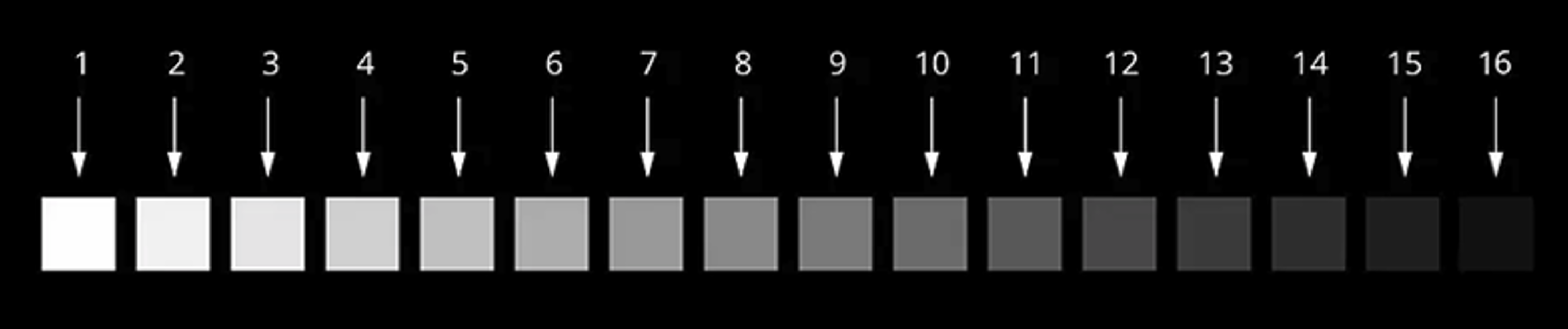
像素的亮度必须处于传感器可测量的范围内,即对于 8 位图像,亮度值需高于 0 且低于 255。所有超出该范围的值都会被赋予可能的最小值(0)或最大值(255)。因此,当亮度值为 0 或 255 时,将无法区分真实的像素强度。例如,若亮度值为 255,其真实值可能是 255、275,甚至是 10000。
光测量中的信号和噪声
为了方便说明,请看下面的图片,该图显示了一个典型的信号,该信号由一个幅度不断增大的正弦波和热噪声组成。
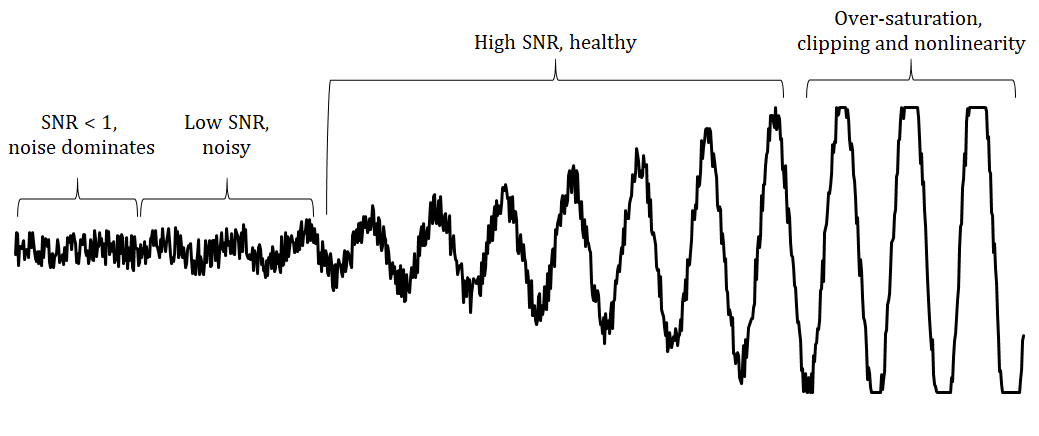
强度测量过程如下:
Noise Floor/噪声基底(左):最低可测量强度受噪声(如读取和量化噪声)限制。光强度必须超过此噪声基底才能被检测到。
Usable Signal Range/可用信号范围(中):低 SNR 和高 SNR 的区域是信号强度足够高以进行准确测量和区分强度级别的范围。
Saturation/过饱和(右):当光强度过高时,像素会变得饱和,从而导致裁剪和信息丢失。
从最低可检测强度到最高可测量强度的整个范围是传感器的动态范围 (DR)。有用信号与噪声的比率称为信噪比 (SNR)。
下图显示了信号电平、噪声和光强度之间的关系。

裁剪和高对比度场景
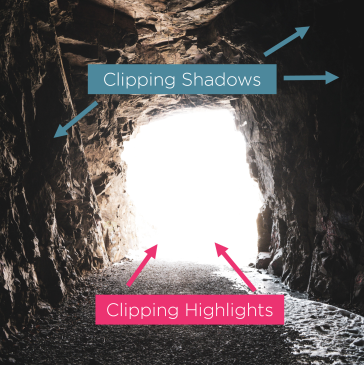
成像传感器通常无法捕获场景的完整动态范围,从而导致一种称为 "裁剪" 的光学现象。裁剪是指特定区域的强度超出传感器可以表示的最小和最大强度。这种细节损失发生在高对比度场景中,其中既有非常亮的场景,也有非常暗的场景。
值为 255(对于 8 位图像)的像素是饱和的(白色),值接近 0(黑色)的像素则处于噪声基底。
调整曝光
相机传感器的读出上限和下限在光子计数方面大致是固定的。然而,调整曝光会改变进入相机、照射到像素上并被读取的光子数量。
增加曝光:更多光子撞击像素,从而改善深色物体的读数。
减少曝光:更少的光子撞击像素,从而防止明亮物体饱和。
调整曝光可确保传感器在最佳范围内运行,为给定的关注区域提供良好的信噪比 (SNR)。这有助于实现场景明暗区域强度水平的平衡。
进一步阅读
要了解有关曝光的更多信息,我们建议您阅读我们的下一篇文章 Stops(曝光级数)简介。