处理被光滑的3D边缘
保留 3D 边缘对于具有精细细节/小特征的对象以及薄且重叠的对象非常重要。此外,此类几何复杂工件的物体检测和姿态估计的准确性依赖于保持其真实的形状和明显的深度差异。
然而,散焦和过度过滤等某些因素可能会平滑 3D 边缘,从而对点云的形状产生不利影响。在本文中,我们讨论解决 3D 边缘过度平滑问题的策略。
如何改善物体的形状,使其边缘更明显、深度差异更清晰?
选择合适的相机
部分 Zivid 相机型号拥有更窄的 FOV 和更高分辨率的 2D 相机,因此能够在相同距离下捕获到更精细的细节。选择相机时,请考虑您的拍摄距离,并选择在该范围内提供最佳空间分辨率的型号。确保您选择的距离在相机的最佳测量范围内。以下是一些有助于选择相机的工具:
物理设置
将相机放置在更靠近场景的位置。虽然投影仪的发光功率是有限的,但投影仪与场景的接近程度决定了照度。这种更近的距离增强了信号,同时环境光的噪声保持不变。更强的信噪比可以提高数据质量和置信度,从而增强点云中的形状和边缘。此外,较短的成像距离提高了空间分辨率,从而能够捕获点云中更精细的细节。
使用正确的预设值
对于 Zivid 2+ 和 Zivid 3 相机,我们针对此特定应用场景提供了专用预设,可生成高分辨率点云。需要注意的是,使用这些特殊预设可能会导致动态范围降低,从而造成数据丢失,尤其是在深色表面和镜面反射表面上。然而,在某些应用和算法(例如 3D 模板匹配)中,牺牲部分数据以获得更清晰的 3D 边缘是值得的。这是因为与大的平坦平面相比,边缘在确保精确匹配方面起着至关重要的作用。
应用 |
捕获时间 (3D) |
相机设置 |
||
|---|---|---|---|---|
高端电脑 |
中端电脑 |
低端电脑 |
||
Small Features(微小特征) |
~1800 毫秒 |
~2300 毫秒 |
~2800 毫秒 |
|
如果预设值无法产生令人满意的结果,请手动微调设置和过滤器。
采集设置
Projector Brightness(投影仪亮度) 将投影仪亮度调至最大值,即可提高信号强度。从而提高信噪比(SNR)。
Gain(增益) 通过将增益(gain)设置降至最低(1.0),可最大限度地减少噪声的影响。因为增益在放大信号的同时也会放大噪声,这是不希望出现的。
光圈/f-number 失焦的捕获会影响点云数据的噪声水平和形状。如果您的相机支持调节光圈,请在设置光圈(f 值)时注意考虑 景深 。
Exposure Time(曝光时间) 通过增加曝光时间来补偿增益和光圈的减小。
如果您不知道如何手动配置设置,请参照以下教程 调整合适的曝光以获取好的点云 。
过滤器
Cluster Filter(聚类过滤器) 过度使用聚类过滤器(Cluster Filter)可能会导致 3D 边缘被错误地移除。建议将
MinArea设置为小于 300,MaxNeighborDistance设置为 5 或更大。Hole Repair Filter(空洞修复过滤器) 通过禁用或采用保守设置来保留 3D 边缘,例如将
HoleSize设置为 0.2 或更小,并将Strictness设置为 3 或 4。Noise Filter(噪声过滤器) 根据应用需求微调
Threshold。使用较高的值可以仅保留高置信度的点。Gaussian Smoothing(高斯平滑) 由于您的应用对点云精度要求很高,请降低
Sigma值或直接禁用该过滤器。Contrast Distortion Filter(对比度失真过滤器) 受对比度失真影响的点被视为置信度较低。可使用对比度失真过滤器的移除功能来剔除这些点。如果您的场景未受到对比度失真的影响,请关闭该过滤器的校正功能,以更好地保留 3D 边缘的锐利度。
HDR
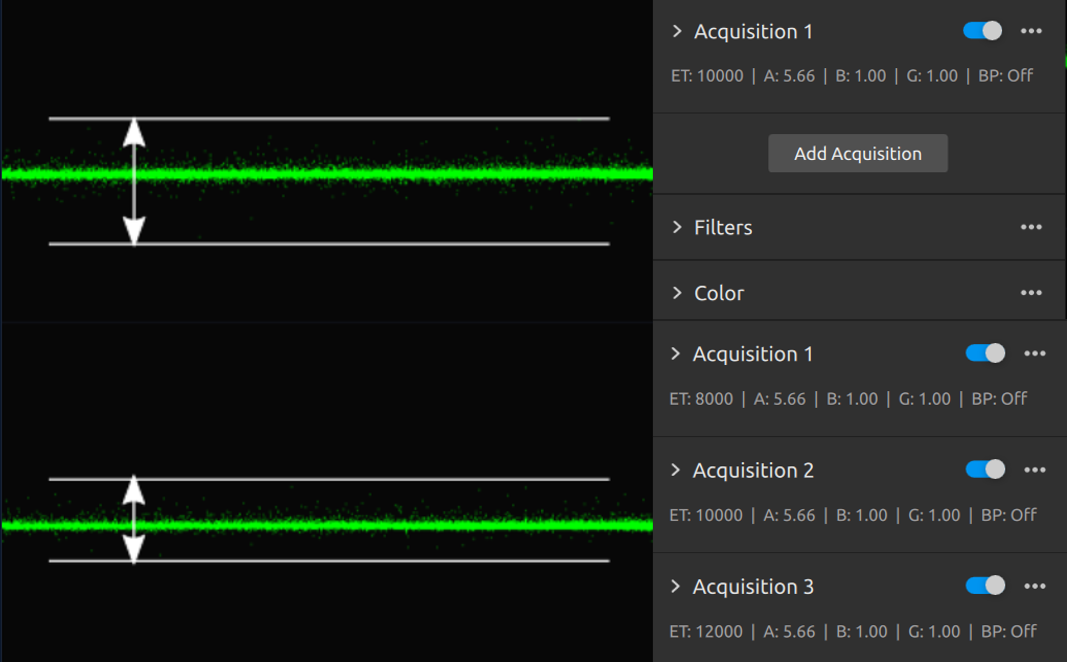
使用相似或相同的曝光捕获 HDR 采集,以提高 SNR。阅读有关此 平均技术 的更多信息。
版本历史记录
SDK |
变更 |
|---|---|
2.17.0 |
已添加 Zivid 3 设置文件的下载链接。 |