How to Optimize the Placement of the Calibration Object
카메라를 서로 180도에 배치하려는 경우를 고려하십시오. 즉, 카메라가 서로 마주보고 있습니다. 우리가 calibration object 을 FOV의 중간에 배치하면 다음 시나리오를 얻습니다.

다행히도 칼리브레이션 대상을 FOV의 한쪽으로 이동하여 각도 제한을 줄일 수 있습니다. 이렇게 하면 칼리브레이션 대상이 두 카메라의 ZY 평면과 정렬되더라도(180도 시나리오) 카메라가 칼리브레이션 대상을 확인 할 수 있습니다.
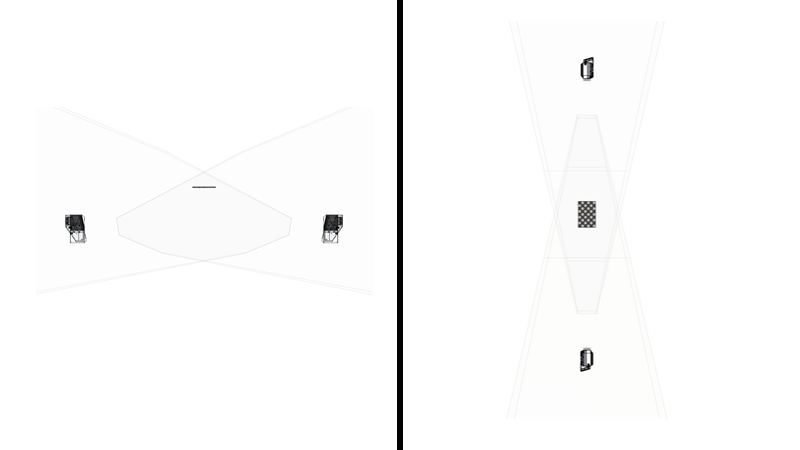
실제로 체커보드는 카메라의 시야에 있어도 감지되지 않을 수 있습니다. 이러한 가파른 각도에서는 체커보드의 픽셀 수가 적으므로 해상도가 떨어집니다. 따라서 실제로 제한은 < 180도(이하) 입니다.
이 개념을 2개 이상의 카메라로 확장할 수 있습니다. 다음 사용 사례를 고려하십시오.
3대의 카메라
서로 120도 각도
수직으로 장착(YZ 평면 공유)
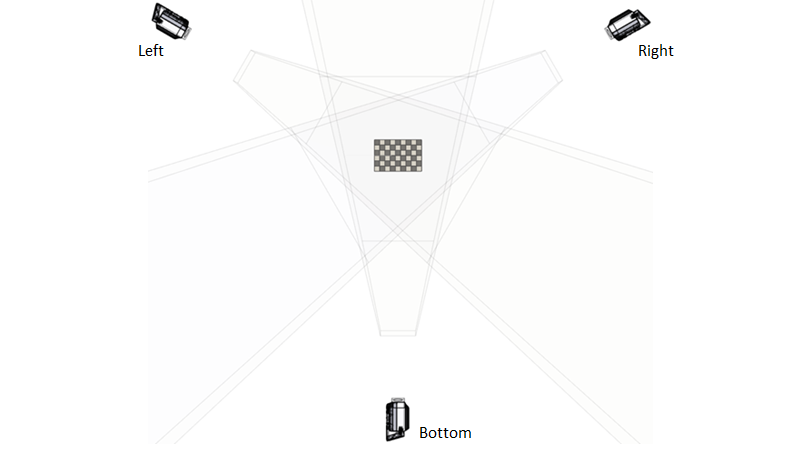
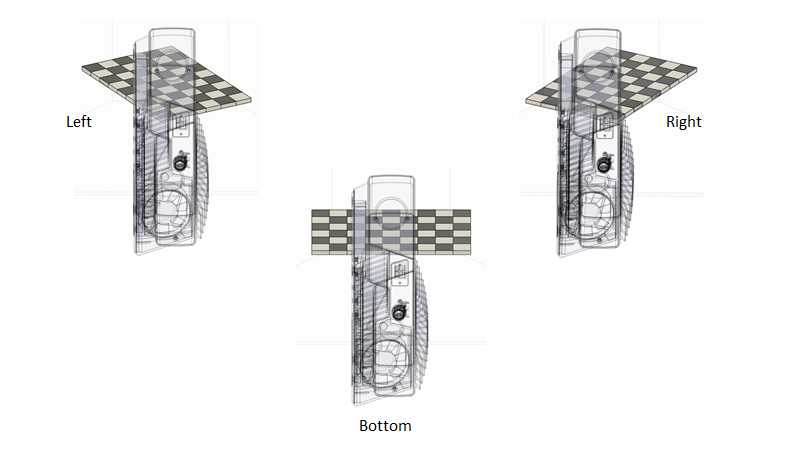
이 경우 체커보드를 캡쳐하여 칼리브레이션을 수행할 수 있습니다.
이제 더 큰 수평 FOV를 갖기 위해 모든 카메라를 수평으로 기울인다고 가정해 보겠습니다.
3대의 카메라
서로 120도 각도
수평으로 장착(XZ 평면 공유)
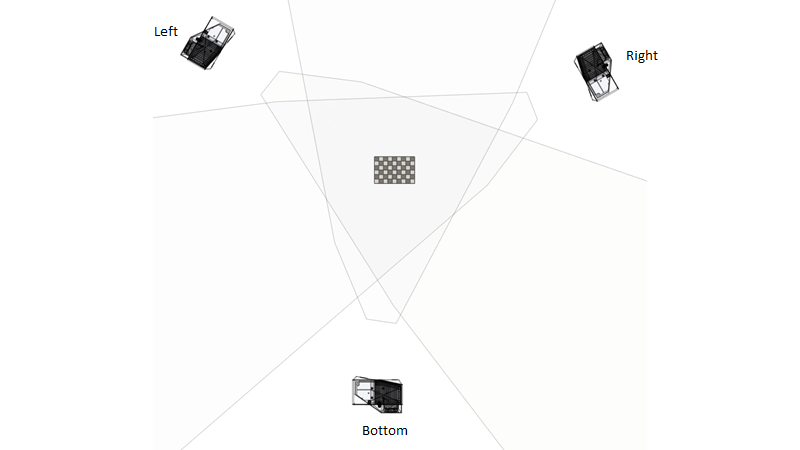
FOV 비율은 칼리브레이션 대상을 공통 평면에 더 가깝게 이동하도록 합니다. 그렇게하면 카메라와 칼리브레이션 대상 사이의 각도가 더 가파르게 됩니다. 체커보드의 해상도가 너무 낮아 칼리브레이션을 수행할 수 없거나 포인트 클라우드 품질이 충분하지 않은 경우 다음을 확인합니다. Multi-step calibration.