使用 CMake 配置 C++ 示例并在 Windows 的 Visual Studio 中构建它们
本教程展示了如何使用CMake配置Zivid C++示例,然后在Windows中使用Visual Studio构建它们。
要求
可选要求
一些示例依赖于外部库,特别是:
备注
下列指令已使用这些版本的依赖项进行了测试:
Visual Studio 2019 及更高版本
CMake 3.24 及更高版本
PCL 1.12.1
Eigen 3.4.0
OpenCV 4.7.0
如果您使用其他版本,可能会遇到问题。
说明
克隆C++示例
克隆 GitHub Zivid C++ Samples 存储库。要克隆它,请按键盘上的 Win + R 键启动命令提示符,然后输入 cmd 并按 Enter。
导航到要克隆存储库的位置,例如
cd C:\Users\Public
然后运行以下命令:
git clone https://github.com/zivid/zivid-cpp-samples
使用CMake配置解决方案
通过命令提示符或 CMake GUI 运行 CMake。
在 zivid-cpp-samples 目录中创建一个构建目录,并通过运行以下命令配置解决方案:
mkdir build && cd build
cmake -DUSE_EIGEN3=OFF -DUSE_OPENCV=OFF -DUSE_PCL=OFF ../source
小技巧
确保 cmake 在您的系统路径中才能使用上述命令。请参阅下面的下拉列表,了解如何将 CMake 添加到系统路径。
将 CMake 添加到系统 PATH
在您的 PC 上,导航至 Control Panel → System and Security → System → Advanced System Settings → Environment Variables 。在 系统变量 下,选择 Path 变量并单击 Edit 。
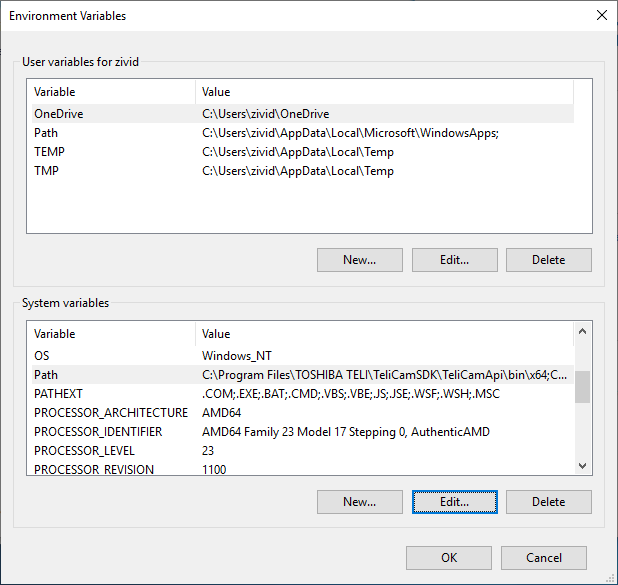
在 Edit environment variable 窗口中,单击 New 并添加 CMake 二进制文件的路径,例如
C:\Program Files\CMake\bin
如果您已在 Program Files 中安装了 CMake。
警告
您可能需要退出 Windows 帐户并再次登录才能使更改生效。
在文件资源管理器中打开生成的 Visual Studio 解决方案 ZividCppSamples.sln 以进一步构建示例。
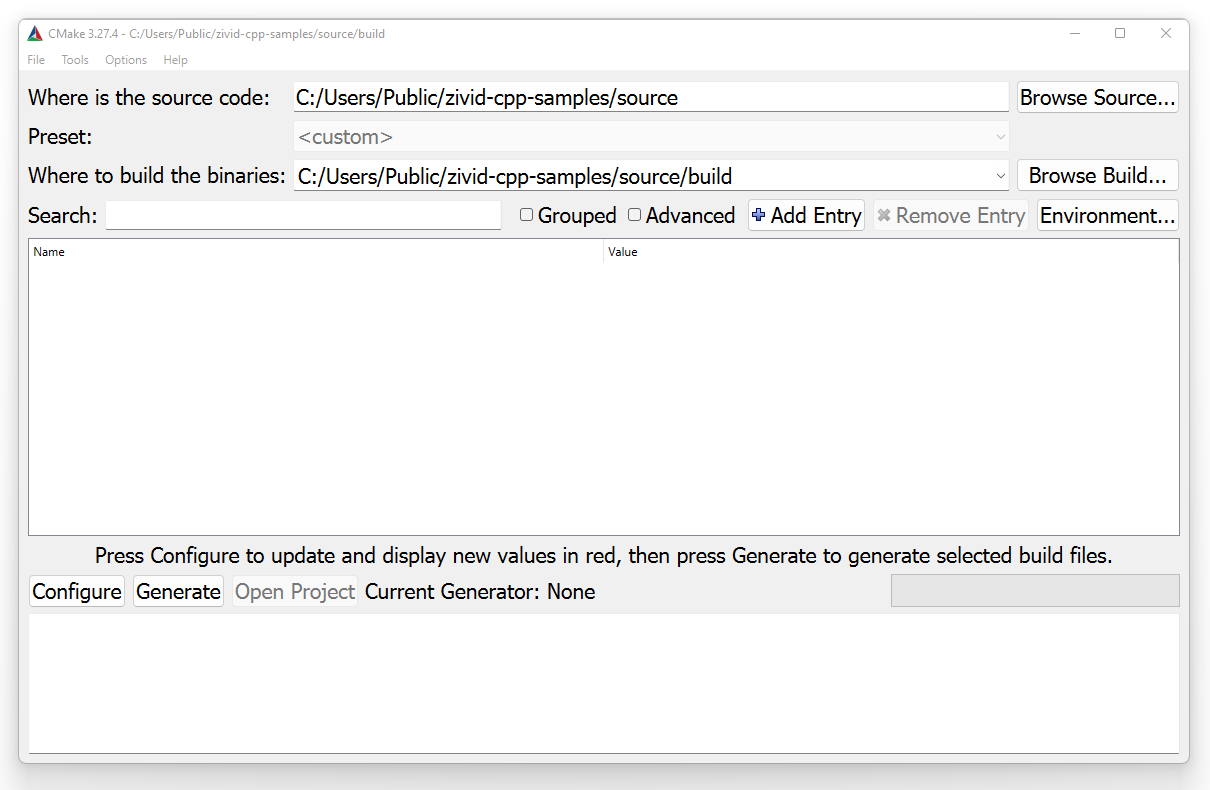
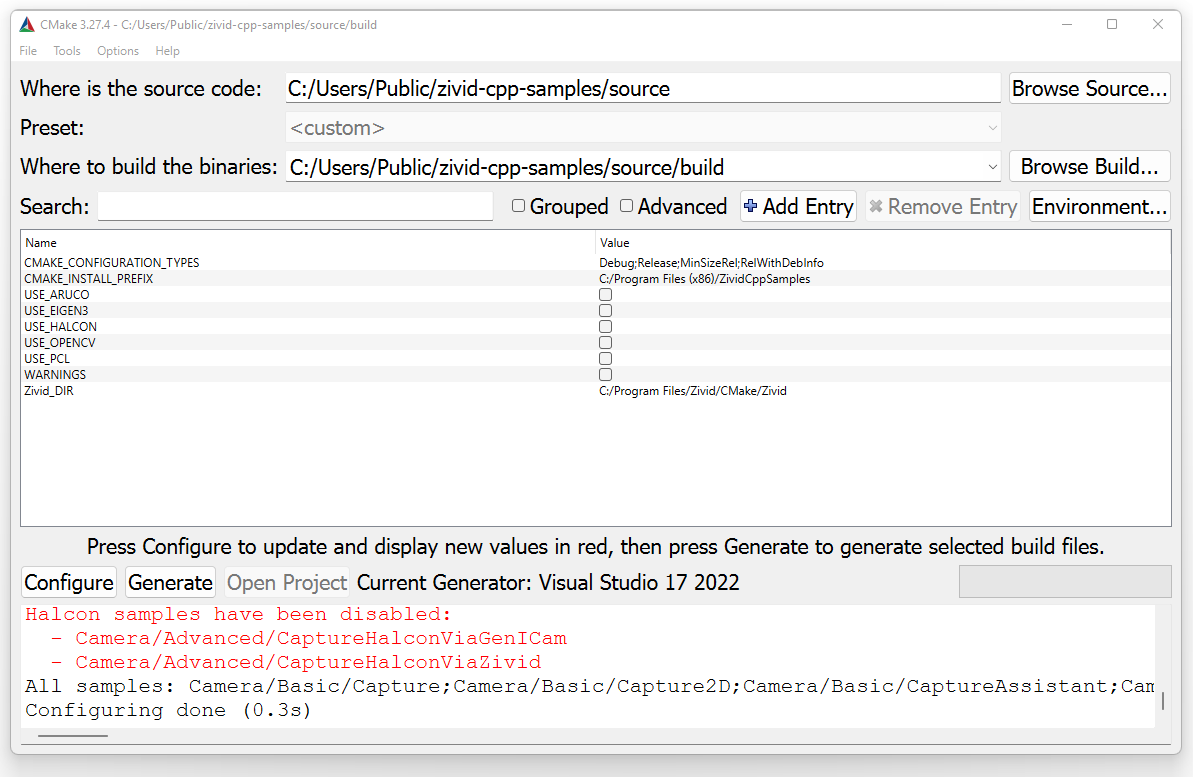
打开 CMake GUI 并选择构建文件夹的源文件夹和目标。
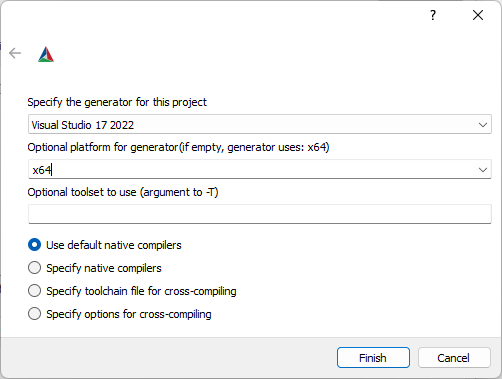
单击 Configure 。为项目指定生成器并确保(可选)平台为 x64 。单击 Finish 。
再次点击 Configure 。
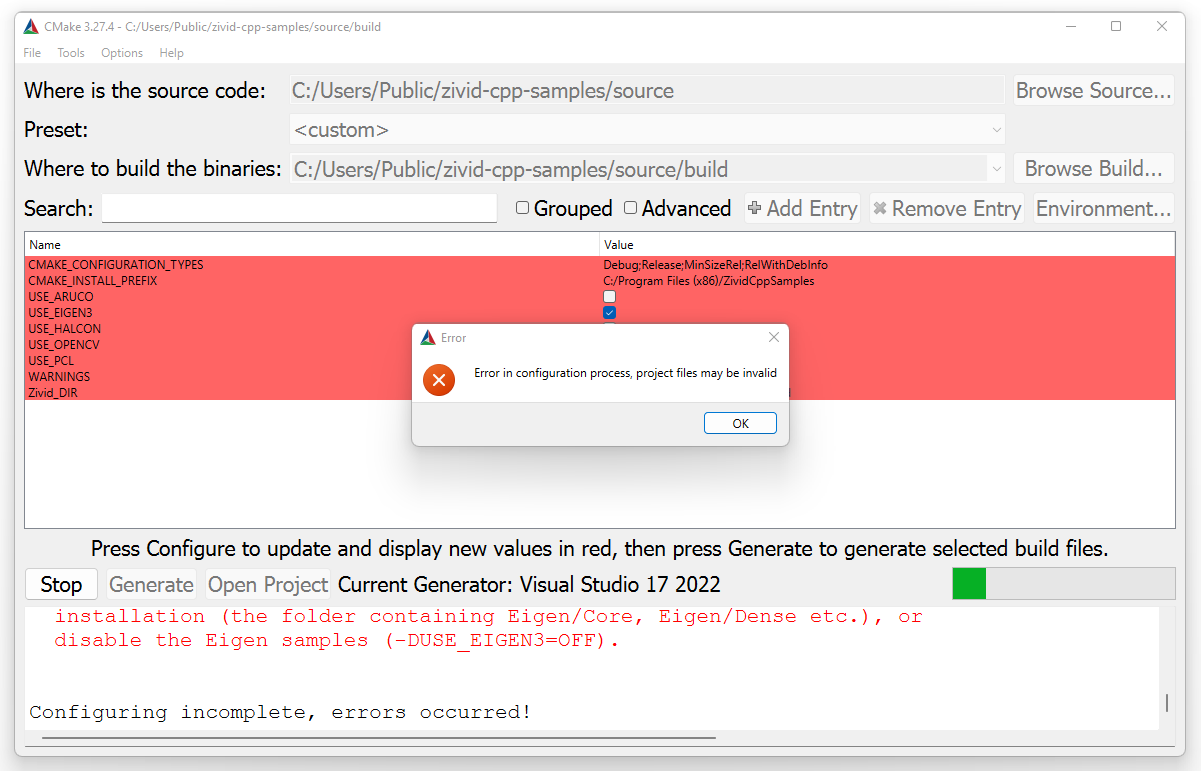
在 CMake 错误上单击 OK 并禁用变量 USE_EIGEN3 、 USE_OPENCV 和 USE_PCL 以配置没有这些依赖项的解决方案。
再一次单击 Configure ,然后单击 Generate 和 Open Project 打开 Visual Studio 解决方案。
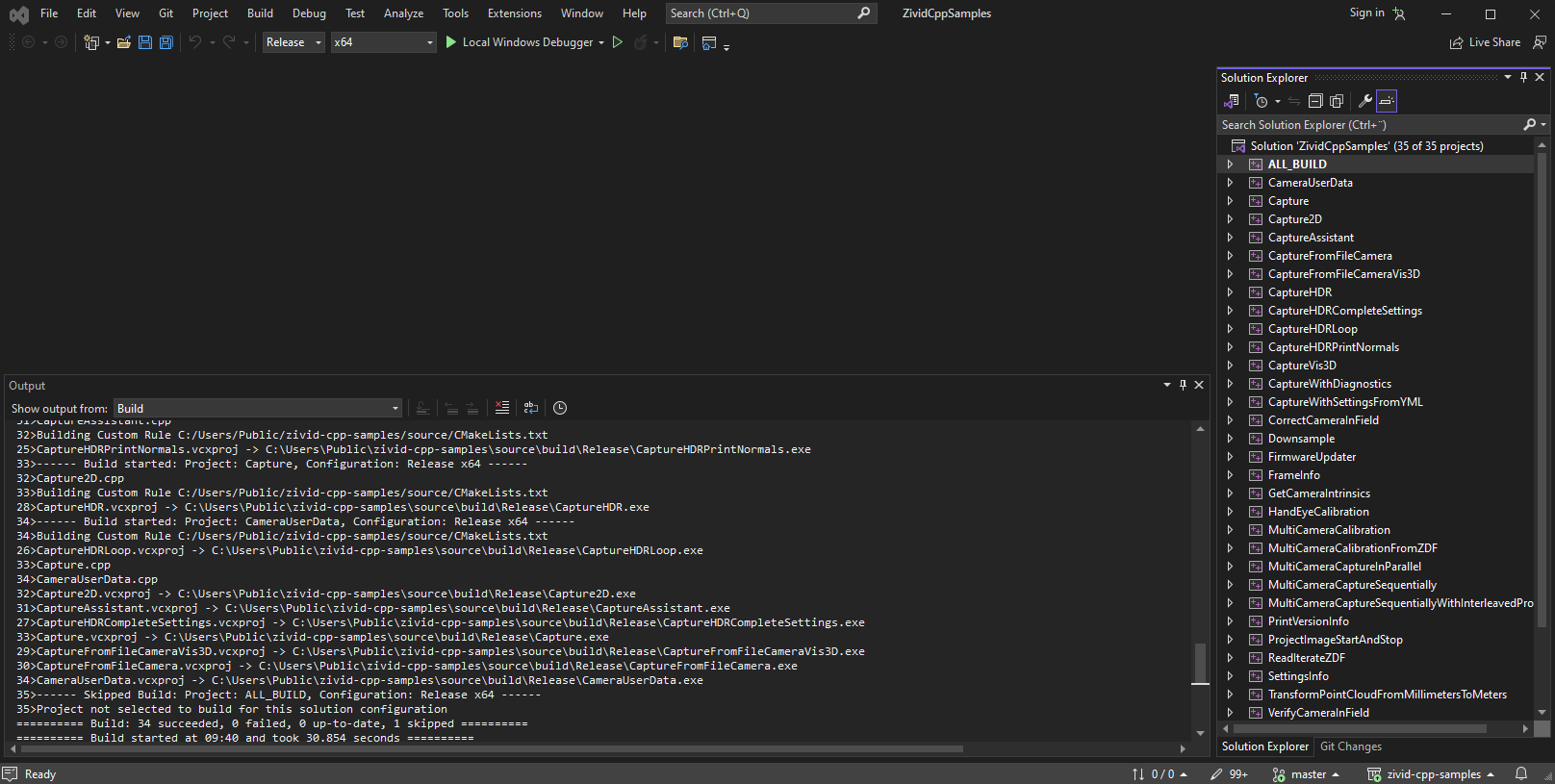
构建解决方案
In Visual Studio, change the build configuration from Debug to Release. Debug builds disable compiler optimizations and significantly degrade performance, which is not suitable for benchmarking or production use.
Build the solution by pressing Ctrl + Shift + B.
运行示例程序
导航到 Release 文件夹并通过双击文件资源管理器中的 exe 或使用命令提示符来运行示例程序,例如
.\CaptureVis3D.exe
运行示例需要Sample Data
一些示例需要额外的数据才能运行,例如点云、文件相机、转换关系等。请参阅 Sample Data 以获取有关如何下载和安装的说明这些。
使用可选依赖项配置示例
部分示例依赖于 Point Cloud Library 、 Eigen 、 OpenCV 和/或 Halcon 。如果您希望运行包含上述一个或多个依赖项的示例,请按照下方折叠面板中的说明进行操作。
可选依赖项
根据您要运行的示例程序安装所需的依赖项;见下表。
示例程序 |
PCL |
Eigen |
OpenCV |
OpenCV (CUDA) |
Halcon |
|---|---|---|---|---|---|
ReadPCLVis3D |
YES |
||||
CaptureWritePCLVis3D |
YES |
||||
CaptureAndVisualizeNormals |
YES |
||||
StitchByTransformation |
YES |
||||
StitchByTransformationFromZDF |
YES |
||||
StitchViaLocalPointCloudRegistration |
YES |
||||
StitchContinuouslyRotatingObject |
YES |
||||
StitchUsingRobotMountedCamera |
YES |
||||
MaskPointCloud |
YES |
||||
Capture2DAnd3D |
YES |
YES |
|||
ROIBoxViaCheckerboard |
YES |
||||
UtilizeHandEyeCalibration |
YES |
||||
PoseConversions |
YES |
||||
ROIBoxViaArucoMarker |
YES |
||||
CaptureUndistort2D |
YES |
||||
CreateDepthMap |
YES |
||||
ProjectAndFindMarker |
YES |
||||
ReprojectPoints |
YES |
||||
ReadProjectAndCaptureImage |
YES |
||||
GammaCorrection |
YES |
||||
AllocateMemoryForPointCloudData |
YES |
||||
CaptureAndConvertImageWithOpenCVOnCuda |
YES |
||||
TransformPointCloudViaCheckerboard |
YES |
||||
TransformPointCloudViaArucoMarker |
YES |
||||
CaptureHalconViaGenICam |
YES |
||||
CaptureHalconViaZivid |
YES |
Download the latest stable release of Eigen from https://libeigen.gitlab.io/ and extract the folder to your desired destination. When configuring the CMake project, include Eigen to configure the samples that depend on it.
导航到您在 zivid-cpp-samples 中创建的构建目录并运行
cmake -DEIGEN3_INCLUDE_DIR=<path> -DUSE_OPENCV=OFF -DUSE_PCL=OFF ../source其中
<path>是安装 Eigen 的完整路径,例如C:/Program Files/Eigen。在 CMake GUI 中,单击 Add Entry 添加 Eigen 的路径。添加
EIGEN3_INCLUDE_DIR并将值指向您提取文件夹的位置。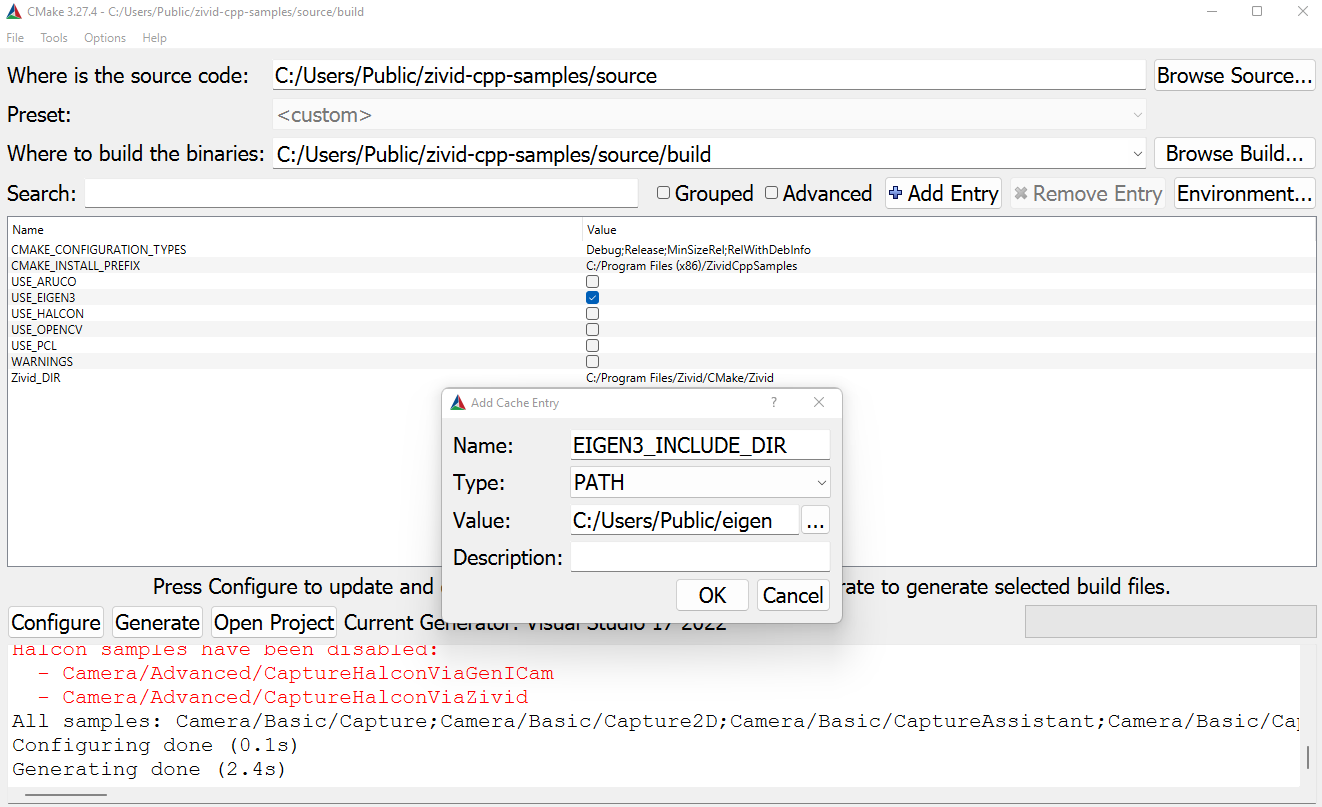
确保选中
USE_EIGEN3,然后单击 Configure 。单击 Generate 和 Open Project 以打开 Visual Studio 解决方案。通过在 https://github.com/PointCloudLibrary/pcl/releases 选择
.exe下载并安装预构建的 PCL binaries 。选中安装第三方库的选项。
在配置 Zivid PCL 代码示例之前,必须将某些设置包含在 PATH 系统变量中。在您的 PC 上,导航至 Control Panel → System and Security → System → Advanced System Settings → Environment Variables 。在 系统变量 下,选择
Path变量并单击 Edit 。在 Edit environment variable 窗口中,单击 New 并添加 PCL binaries 和 OpenNI2(第三方库)的路径,例如
C:\Program Files\PCL 1.12.1\bin C:\Program Files\OpenNI2\Tools如果您已在 Program Files 中安装了 PCL 1.12.1 和 OpenNI2。您可能需要退出 Windows 帐户并再次登录以使更改生效。
警告
您可能必须手动链接到某些第三方 PCL 库,例如 VTK。如果遇到错误,请在 PATH 系统变量中添加库二进制文件的路径。例如,对于 VTK,如果您在 Program Files 中安装了 PCL 1.12.1,则应添加
C:/Program Files/PCL 1.12.1/3rdParty/VTK/bin。配置 CMake 项目时,应已配置 PCL 的路径。
导航到您在 zivid-cpp-samples 中创建的构建目录并运行
cmake -DUSE_PCL=ON -DUSE_EIGEN3=OFF -DUSE_OPENCV=OFF ../source在 CMake GUI 中,确保勾选了
USE_PCL,然后单击 Configure 。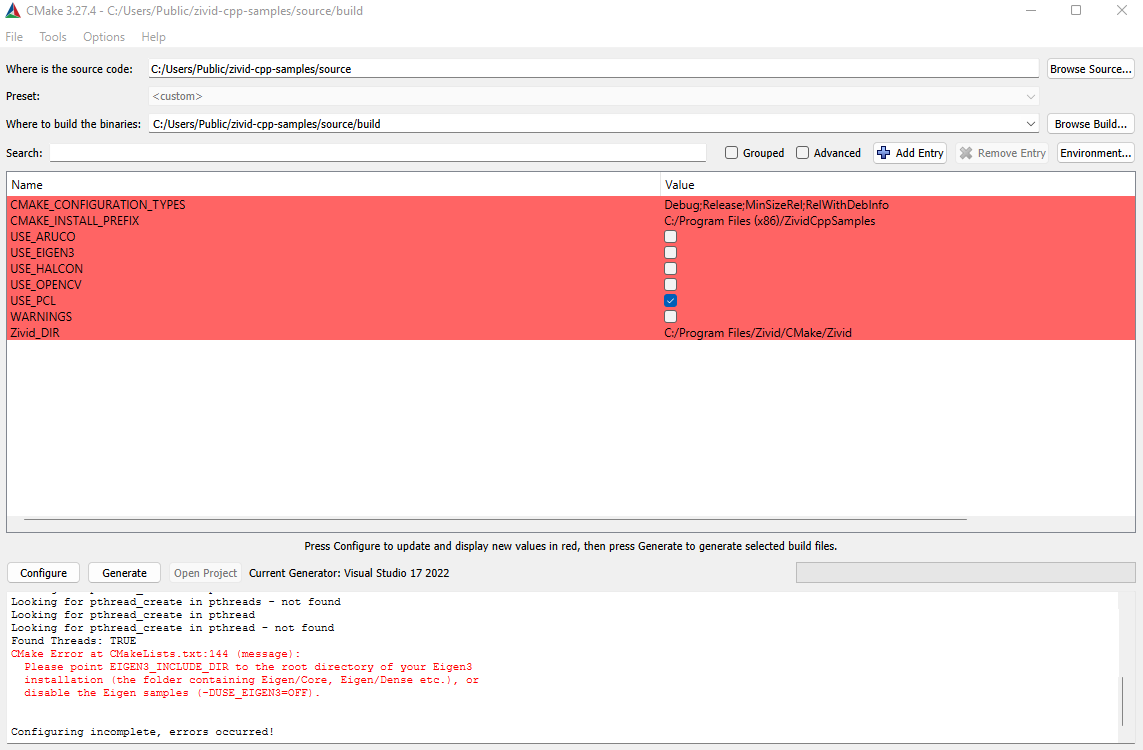
单击 Generate 和 Open Project 以打开 Visual Studio 解决方案。
从 https://opencv.org/releases/ 下载并安装预构建的 OpenCV binaries 。将它们提取到您希望放置的目录,例如
C:\Users\Public在配置 Zivid OpenCV 代码示例之前,必须将某些设置包含在 PATH 系统变量中。在您的 PC 上,导航至 Control Panel → System and Security → System → Advanced System Settings → Environment Variables 。在 系统变量 下,选择
Path变量并单击 Edit 。在 Edit environment variable 窗口中,单击 New 并添加 OpenCV binaries 的路径,例如
C:\Program Files\opencv\build\x64\vc16\bin如果您已经安装了 OpenCV 4.7.0 并将其解压到
C:/Program Files/opencv。警告
您可能需要退出 Windows 帐户并再次登录才能使更改生效。
配置 CMake 项目时,请包含 OpenCV 以配置依赖于它的示例。
导航到您在 zivid-cpp-samples 中创建的构建目录并运行
cmake -DOpenCV_DIR=<path> -DUSE_EIGEN3=OFF -DUSE_PCL=OFF ../source其中
<path>是 OpenCV 构建文件夹的完整路径,例如C:/Program Files/opencv/build。在 CMake GUI 中,单击 Add Entry 添加 OpenCV 的路径。添加
OpenCV_DIR并将值指向 OpenCV 构建文件夹。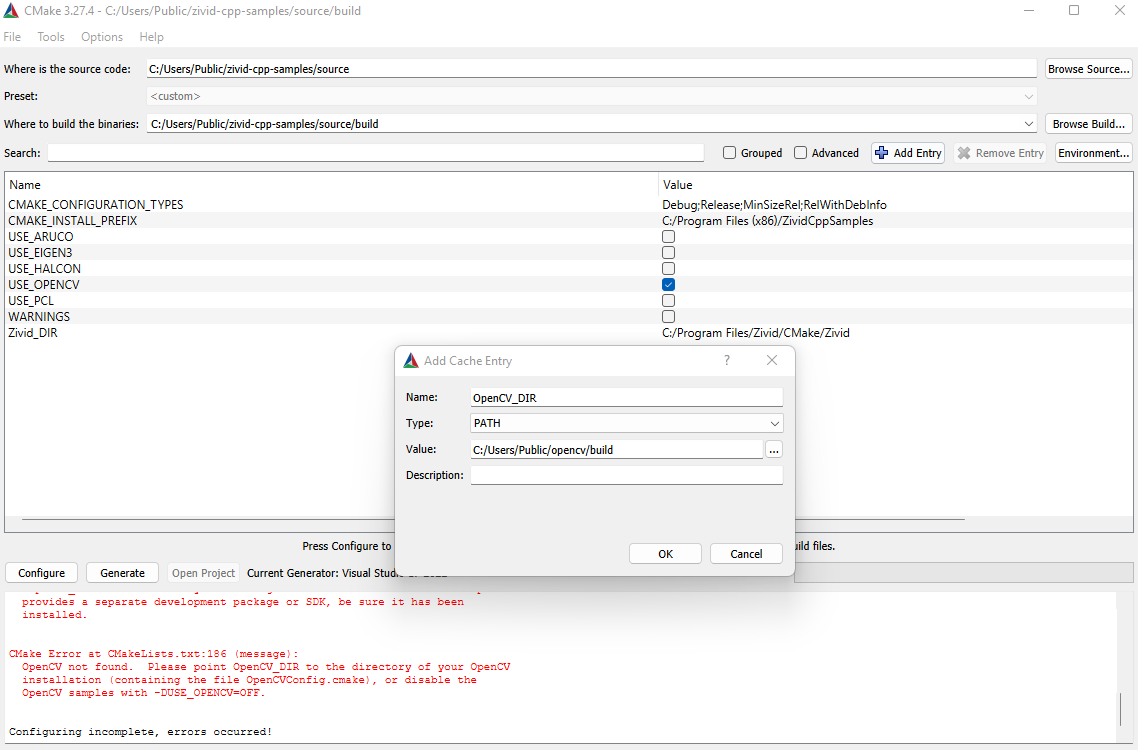
确保选中
USE_OPENCV框并单击 Configure 。然后单击 Generate 和 Open Project 以打开 Visual Studio 解决方案。您需要在 PC 上安装 Halcon 才能运行 Halcon C++ 示例。请转至 在Windows中安装Zivid + HALCON 了解更多说明。
安装 Halcon 后,配置 CMake 以使用 Halcon 示例。
导航到您在 zivid-cpp-samples 中创建的构建目录并运行
cmake -DUSE_HALCON=ON -DUSE_EIGEN3=OFF -DUSE_OPENCV=OFF -DUSE_PCL=OFF ../source确保勾选了
USE_HALCON,然后单击 Configure 。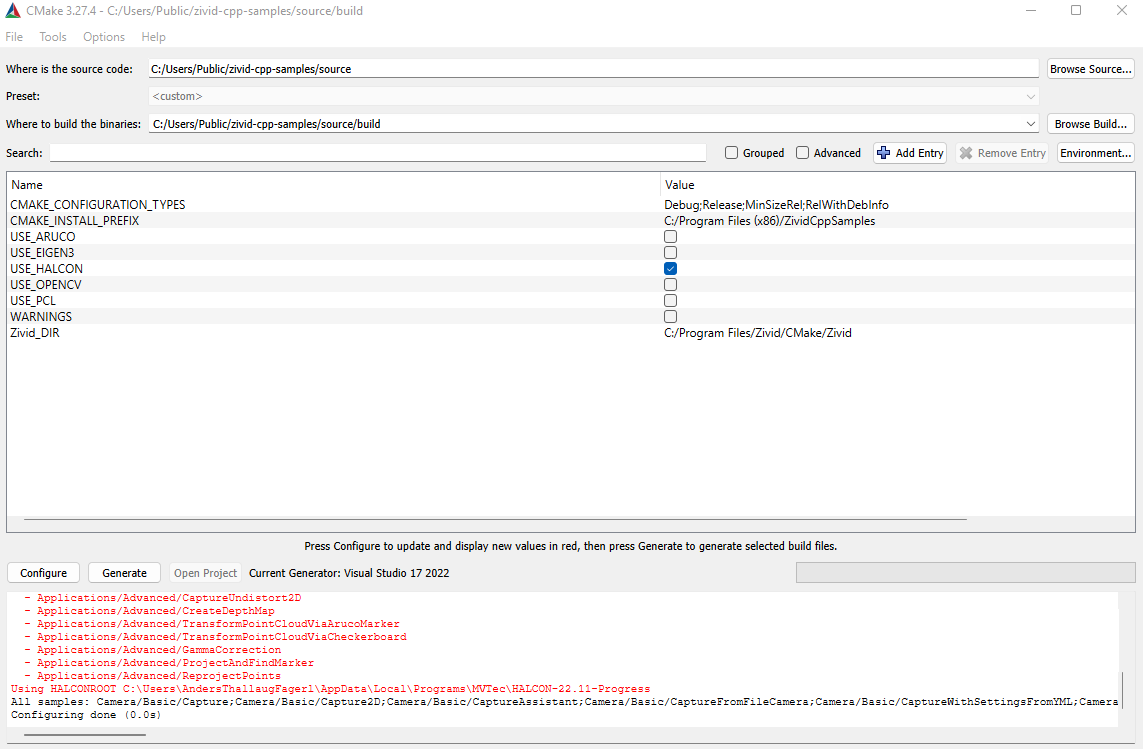
然后单击 Generate 和 Open Project 以打开 Visual Studio 解决方案。
如果您想一次配置多个依赖项,只需在 CMake 中同时添加多个依赖项即可。例如,如果您想使用需要 Eigen、PCL 和 OpenCV 等依赖项的所有示例,您可以运行
cmake -DEIGEN3_INCLUDE_DIR=<path-to-eigen> -DUSE_PCL=ON -DOpenCV_DIR=<path-to-opencv> ../source
其中 <path-to-eigen> 和 <path-to-opencv> 是 Eigen 和 OpenCV 文件夹的路径。
调试示例程序
如需debug示例,您必须将 C:/Program Files/Zivid/bin_debug 添加到 PATH 环境变量中。请按照以下下拉列表中的说明执行此操作。
调试示例程序
在您的PC上,导航到 Control Panel → System and Security → System → Advanced System Settings → Environment Variables。
在 系统变量 下,选择 Path 变量并单击 Edit 。
在 Environment variables 窗口中,单击 New (窗口右上角,在用户变量部分)并添加以下值:
C:\Program Files\Zivid\bin_debug
备注
如果要调试依赖于输入文件的程序,则必须将工作目录更改为 ${TargetDir} 。
将构建配置从 Release 更改为 Debug 。然后单击 F5 以使用调试模式进行构建和运行。
版本历史记录
SDK |
变更 |
|---|---|
2.17.0 |
由于原生支持对无序点云的可视化,已移除对 Open3D 的依赖。 |
2.16.0 |
添加了在 Ubuntu 上配置带有可选依赖项的 C++ 示例的说明。添加了在 Ubuntu 和 Windows 上配置 Open3D 的说明。 |