生产准备过程
我们在Zivid SDK中有多个流程和工具可帮助您设置好系统并为生产做好准备。我们建议在部署之前进行的必要的操作包括:
预热
现场标定
手眼标定
我们可以通过执行这些流程模仿生产条件来优化相机的工作温度、距离和 FOV 。其它可能帮助您减少生产过程中的处理时间从而最大限度地提高抓取率的工具包括:
坐标系转换和ROI盒过滤
下采样
机器人标定
在开始生产之前,您应该确保您的机器人经过良好校正,并展现出良好的定位精度。关于何如进行机器人运动学校正和机器人校正零点的信息,请联系您的机器人供应商。
预热
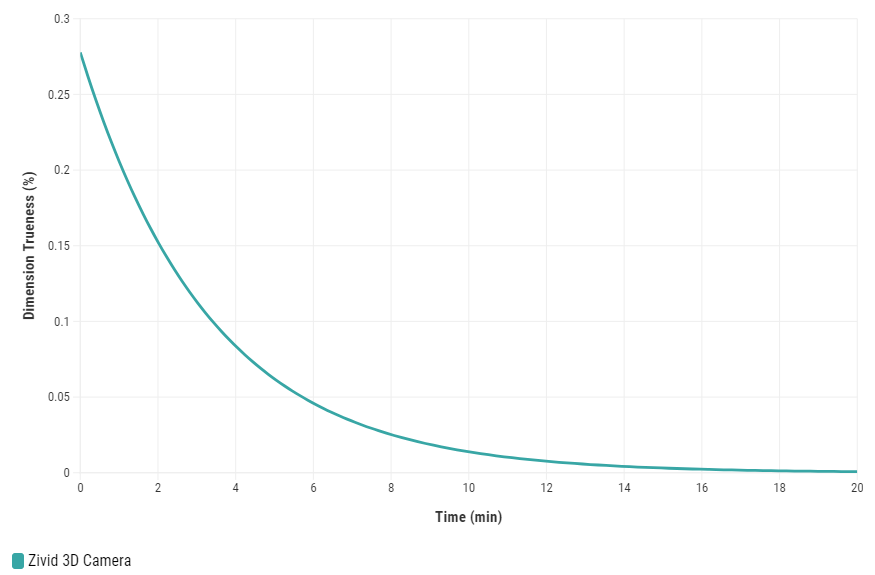
对Zivid 3D相机进行预热并达到热平衡,可以提高应用的整体准确性和成功率。如果应用有着严格的公差要求,则建议使用此方法,例如,距离相机每米距离的公差<5毫米的3D抓取应用。使用预热过的相机进行现场标定和手眼标定能够获得更好的结果。
如需对您的相机进行预热,您可以运行我们的代码示例,您需要输入循环时间和相机设置路径。
示例: warmup.py
python /path/to/warmup.py --settings-path /path/to/settings.yml --capture-cycle 6.0
如需了解为什么需要预热以及如何使用SDK进行预热,请阅读 预热 。
小技巧
如果您的相机长时间不触发拍照(持续时间超过 10 分钟),则保持 Thermal Stabilization(热稳定功能) 处于启用状态非常有益。
现场标定
现场标定是一个维护工具,可用于验证和校正Zivid相机的尺寸准确度。用户可以检查视场 (FOV) 中不同区域的点云的尺寸准确度,并确定验证结果是否符合您的应用要求。如果发现验证结果对于应用来说不够准确,则可以执行校正以增加点云的尺寸准确度。多次测量的平均尺寸准确度误差的预期值接近于零 (<0.1%)。
为什么这是必要的?
我们的相机被设计为可以在工业工作环境中工作并持续输出高质量的点云。然而,与大多数高精密电子仪器一样,有时可能需要进行一些调整以确保它们能够一直保持最佳性能。当相机在其环境中经历重大改动或繁重的装卸时,可能需要进行校正才能在新的设置中以最佳状况执行工作。
如果您第一次进行这些操作,请阅读有关 现场标定 的更多信息。
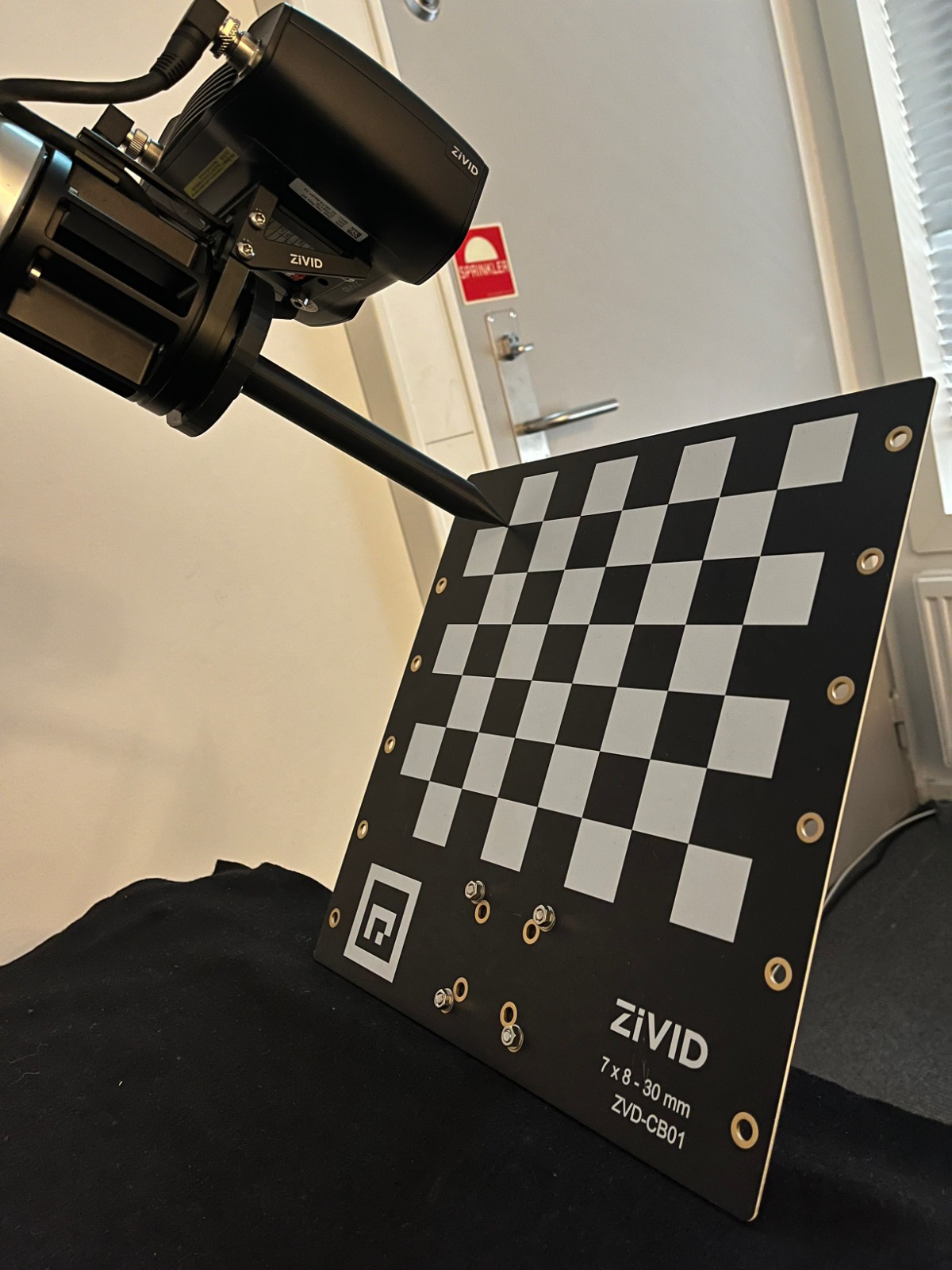
进行现场验证时,需要确保料箱顶部和底部的尺寸准确度都是良好的。对于相机安装在手臂上的应用,在进行现场验证时,将机器人移动到捕获位姿。如果验证结果良好,则无需运行内场校正。
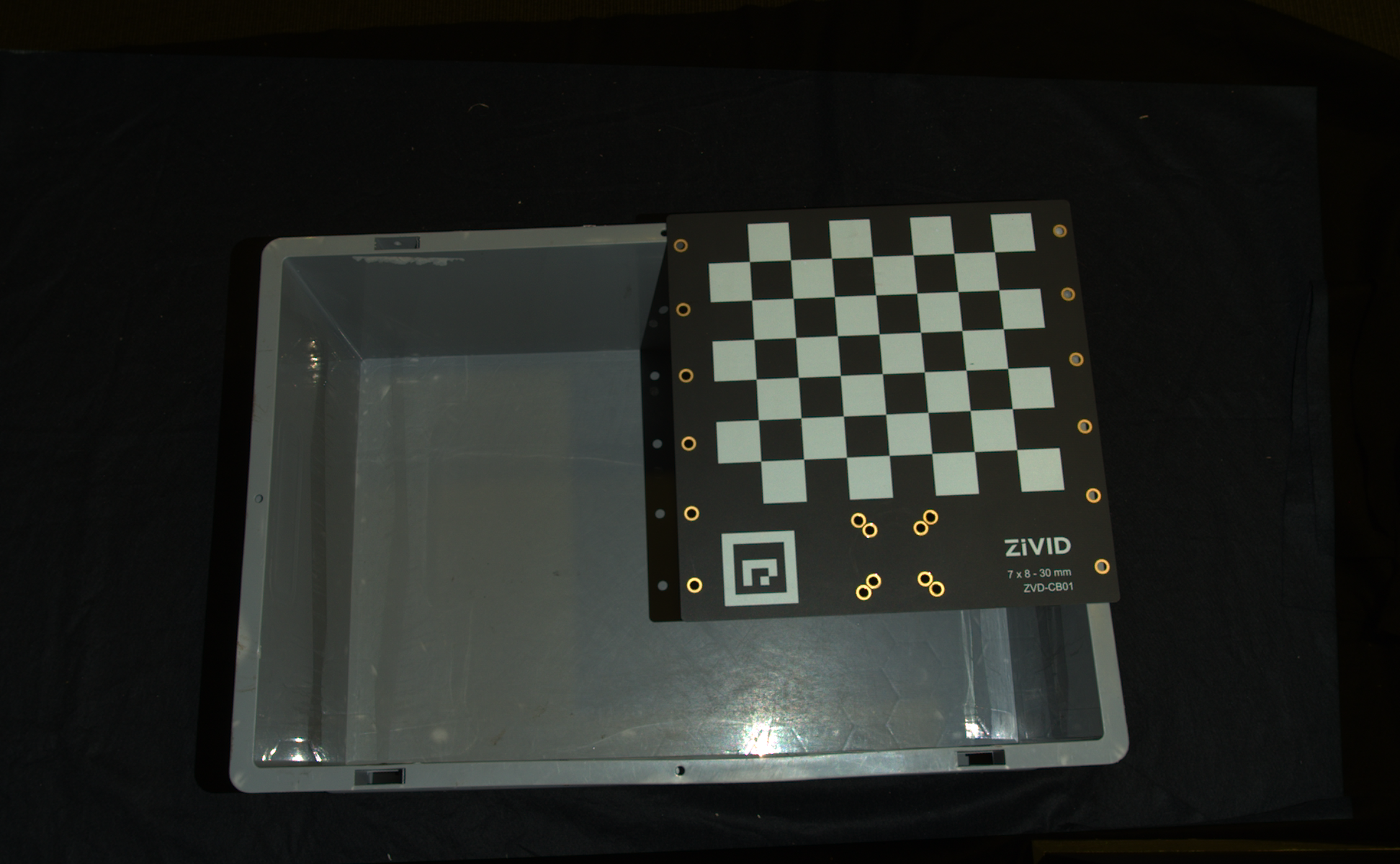 标定板放置于箱子顶部用于现场标定
标定板放置于箱子顶部用于现场标定
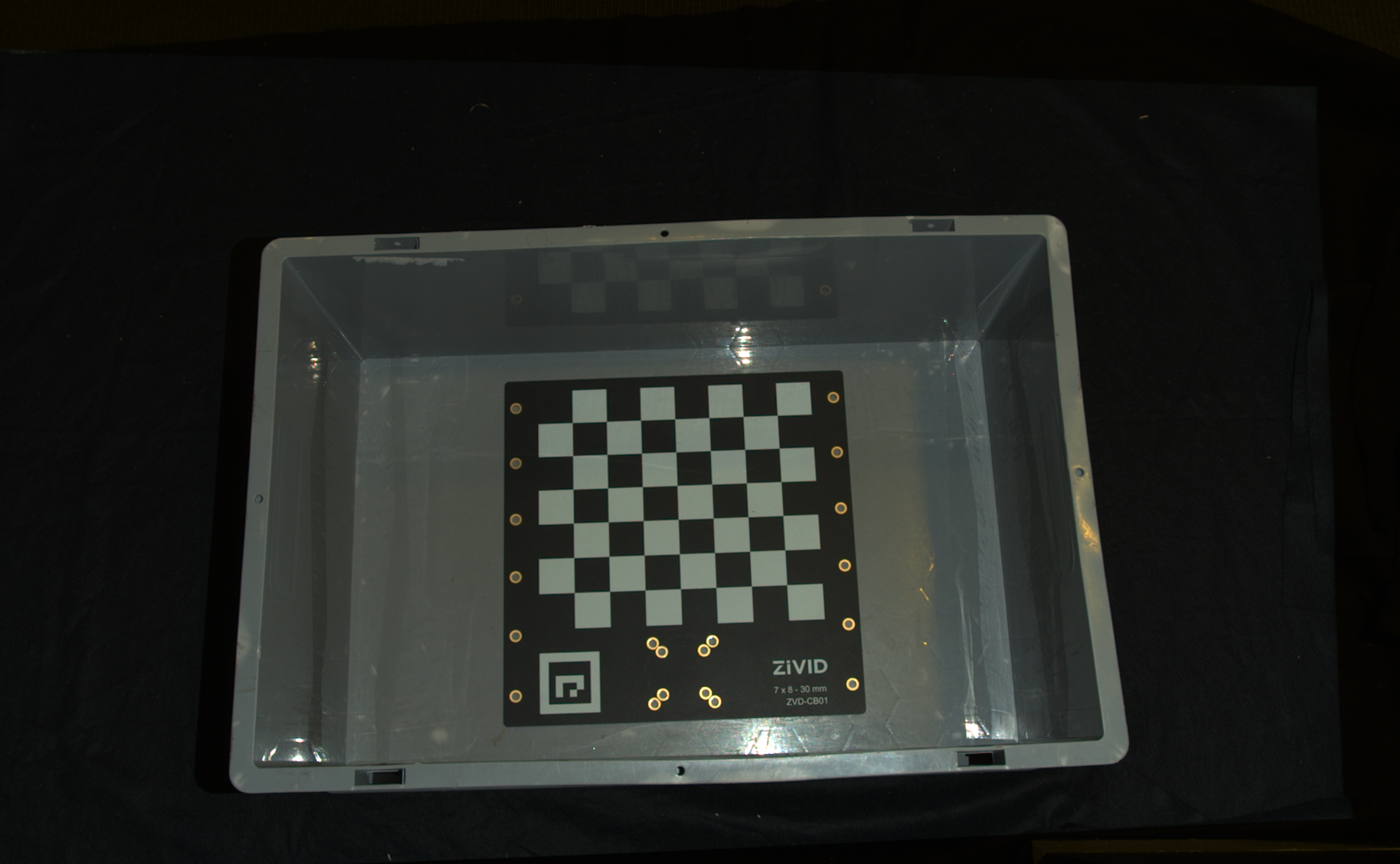 标定板放置于箱子底部用于现场标定
标定板放置于箱子底部用于现场标定
当需要进行现场标定时,覆盖整个工作立体区域可以获得最佳的结果。这意味着需要将 Zivid calibration board 先后放置给定距离处的多个不同位置执行校正,并在不同的拍照距离重复以上操作,在这个过程中,请确保整个标定板一直都在相机的 FOV 中。选定箱子底部的数个位置和箱子顶部的数个位置进行校正足以满足料箱拣选的要求。您可以查看 进行现场标定的准则 来了解更多信息。
如需在相机上运行现场标定的验证和/或校正功能,您可以使用:
Zivid Studio
CLI工具
SDK
小技巧
如果您是第一次使用现场标定,我们建议使用Zivid Studio。
查看 运行现场标定 以获得有关运行现场校正的分步指南。
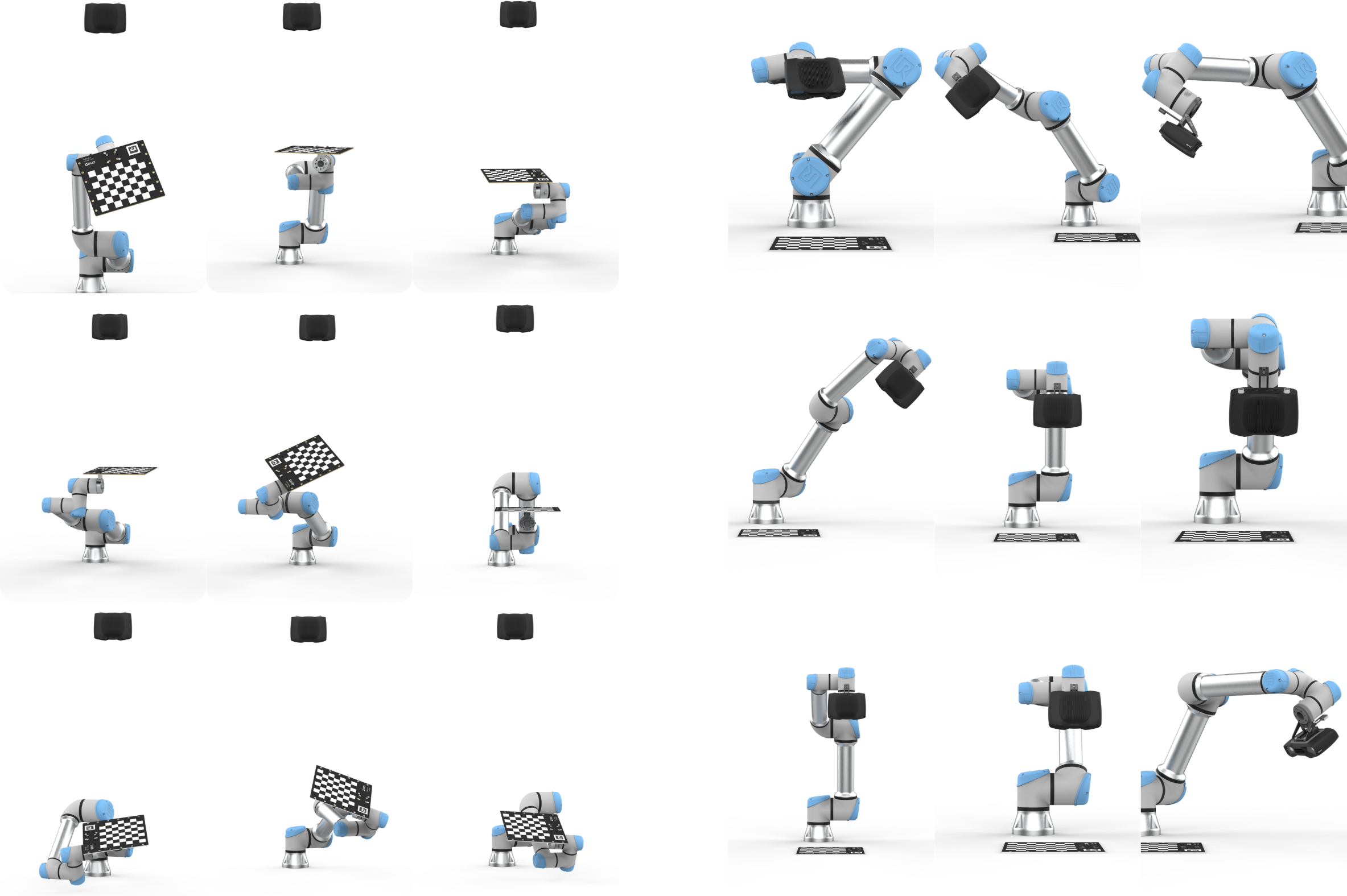
手眼标定
In the table below, you can find our recommendations on which hand-eye calibration tool to use based on your goals and requirements. For a detailed analysis of the tools and their features, see How to run and integrate Zivid Hand-Eye Calibration.
Goal |
Recommended Tool |
|---|---|
Guided, no-code workflow |
|
Minimal integration example |
|
Existing dataset |
|
Any robot |
|
UR robot |
After completing hand-eye calibration, you may want to verify that the resulting transformation matrix is correct and within the accuracy requirements. Our recommendation is to perform the touch test with the robot, which is a physical test that requires a verification end-of-arm tooling. For a detailed walkthrough, see check the tutorial: Any Robot + RoboDK + Python: Verify Hand-Eye Calibration Result via Touch Test.
Alternative options are provided on How to Verify Hand-Eye Calibration page.
ROI盒过滤
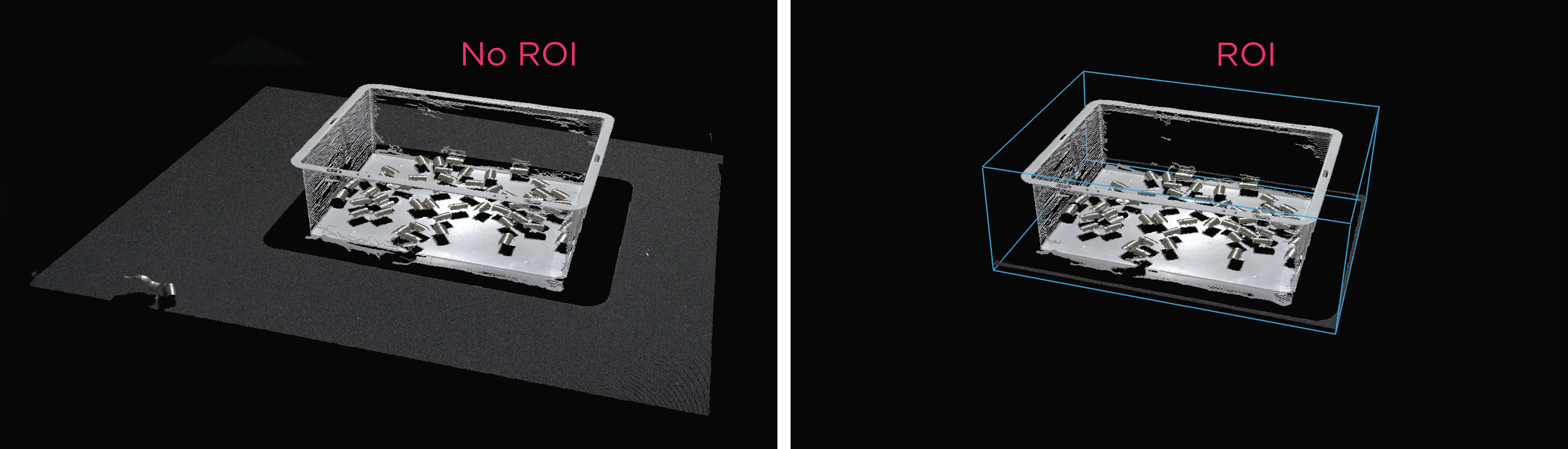
相机视野通常比我们的 感兴趣区域 (ROI) 大,例如一个箱子。为了优化数据处理,我们可以在箱子周围设置一个 ROI 框,并相应地裁剪点云,仅捕获箱子以内的数据。ROI 框过滤不仅可以减少捕获时间,还可以减少算法使用的数据点数量,从而提高其速度和效率。
小技巧
点云越小,捕获速度越快,从而可以加快检测速度并缩短总拾取周期时间。
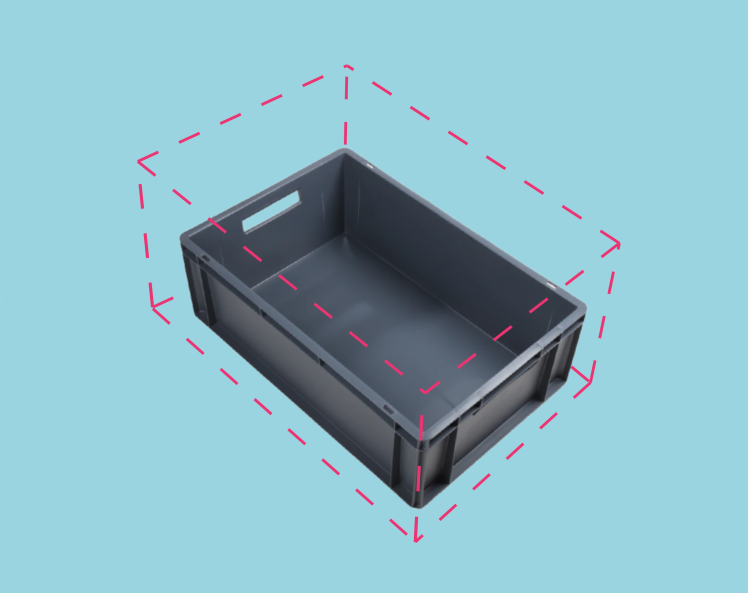
如需了解实施示例,请查看 通过棋盘格定义的ROI盒 。该教程展示了如何使用 Zivid calibration board 根据相对于棋盘格给定的ROI盒来过滤点云。
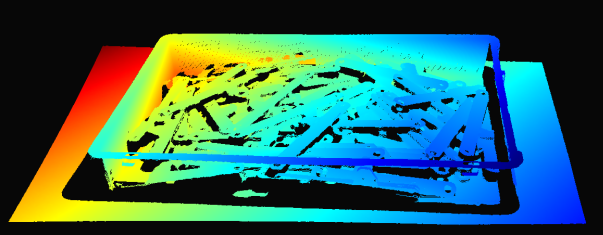 ROI裁剪前的点云
ROI裁剪前的点云
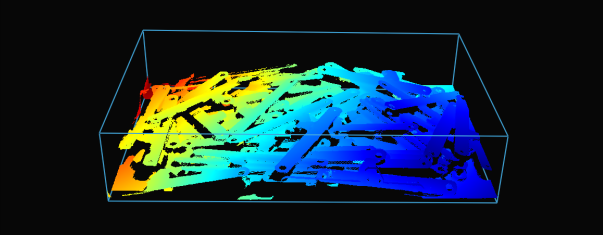 ROI裁剪后的点云
ROI裁剪后的点云
示例和表现
这是一个使用低端 PC(搭载 Intel Iris Xe 笔记本电脑集成显卡 和 1G 网卡)进行大量点云处理的示例,其中 ROI 框过滤方法对提升效率很有益处。
想象一下,一个机器人用固定安装的 Zivid 2+ MR130 相机从 600 x 400 x 300 毫米的箱子中拾取物品。为了给机器人留出足够的空间,相机安装在距离箱子顶部 1700 毫米的位置,提供大约 1000 x 800 毫米的视场。当相机安装在这个距离时,大部分视场都在 ROI 之外,因此可以从每一侧裁剪约 20/25% 的像素列/行。从下表可以看出,使用 ROI 框过滤可以显著缩短捕获时间。
预设值 |
采集时间 |
捕获时间 |
||
|---|---|---|---|---|
未设置 ROI |
设置了 ROI |
未设置 ROI |
设置了 ROI |
|
Manufacturing Specular |
0.64 s |
0.64 s |
2.1 s |
1.0 s |
下采样
备注
选择一个包含下采样选项的预设值。但是,为了理解这意味着什么,请参阅 Sampling(采样) - 3D 。本文还有助于了解在未选择预设的情况下应使用哪些下采样设置。
有些应用不需要高密度点云数据。例如,通过将平面拟合到盒子表面来进行盒子检测以及 CAD 匹配,其中对象具有独特且易于识别的特征。此外,对于机器视觉算法来说,这样的数据量通常太大,无法以应用程序所需的速度进行处理。点云下采样正是在此类应用中发挥作用。
在点云领域,下采样(Downsampling)是指在保持相同三维表征的前提下,降低空间分辨率。它通常用于将数据转换为更易处理的规模,从而减少存储和处理需求。
使用 Zivid SDK 对点云进行下采样有两种方法:
通过设置
Settings::Processing::Resampling( Resampling(重采样) )实现,这意味着它是通过捕获设置进行控制的。通过 API
PointCloud::downsample实现。
这两种方法都对点云应用了相同的操作。通过 API 的方法,您可以选择就地下采样或使用下采样数据获取新的点云实例。
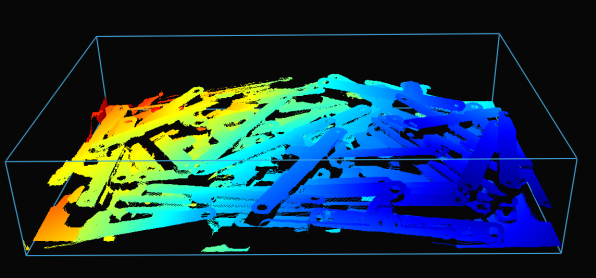 下采样前 ROI 裁剪点云
下采样前 ROI 裁剪点云
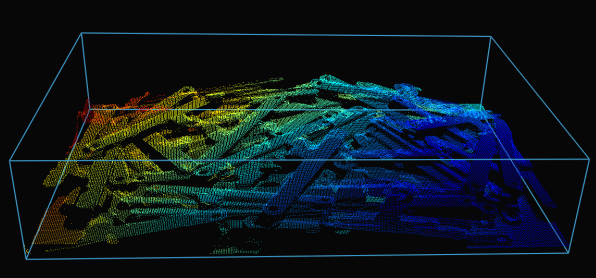 下采样后 ROI 裁剪点云
下采样后 ROI 裁剪点云
下采样可以就地完成,该功能会修改当前的点云。

也可以将下采样点云作为新的点云实例,这样就不会改变现有的点云了。
Zivid SDK 支持以下下采样率 by2x2 、 by3x3 和 by4x4 ,支持多次执行下采样操作。
要对点云进行下采样,您可以运行我们的代码示例,或者现在可以跳过它,并将其作为本教程下一步的一部分进行。"
示例: downsample.py
python /path/to/downsample.py --zdf-path /path/to/file.zdf
如果您没有ZDF文件,则可以运行以下代码示例。它将使用您的设置来捕获Zivid点云,并保存到文件中。
示例: capture_with_settings_from_yml
python /path/to/capture_with_settings_from_yml.py --settings-path /path/to/settings.yml
如需阅读有关下采样的更多信息,请转到 下采样 。
祝贺您已经阅读完关于将您的料箱拣选系统投入生产的准备工作中的所有与Zivid有关的内容了。接下来的章节是 维护 ,里面包含了我们建议执行的所有流程,以确保料箱拣选单元能在最小停机时间的情况下保持稳定运行。
版本历史
SDK |
变更 |
|---|---|
2.12.0 |
新增了内容用于说明 ROI 框过滤如何加快数据捕获时间。现在也可以通过 |
2.10.0 |
Monochrome Capture(单色捕获) 是一种比 下采样 更快的替代方案。 |