Resampling(重采样)
Zivid 的一个关键优势是固有的 2D 到 3D 映射。点云以 有序数组 形式返回,并且 RGB 值与其各自的点一一对应。
但是,3D 数据所需的分辨率并不总是与 2D 数据所需的分辨率相同。例如,人们通常需要比 3D 分辨率更高的 2D 分辨率。当您捕获单独的 2D 图像和 3D 点云时,2D 图像的分辨率可能高于 3D 点云。这可以通过 Sampling::Pixel 设置来实现,请参阅 Pixel 和 Pixel(像素) 。
为了保持 2D 和 3D 数据之间的一一对应关系,可以对 3D 数据进行重新采样,以匹配 2D 数据的分辨率。这可以通过 Settings::Processing::Resampling 来完成。
重采样可以是上采样或下采样。以下两节将分别讨论这两者。
上采样
通常用于匹配 2D 分辨率,当 3D 分辨率低于 2D 分辨率时使用。
例子
以下示例展示了如何捕获具有不同分辨率的 2D 和 3D 数据,同时保持 2D 和 3D 数据之间的一一对应关系。
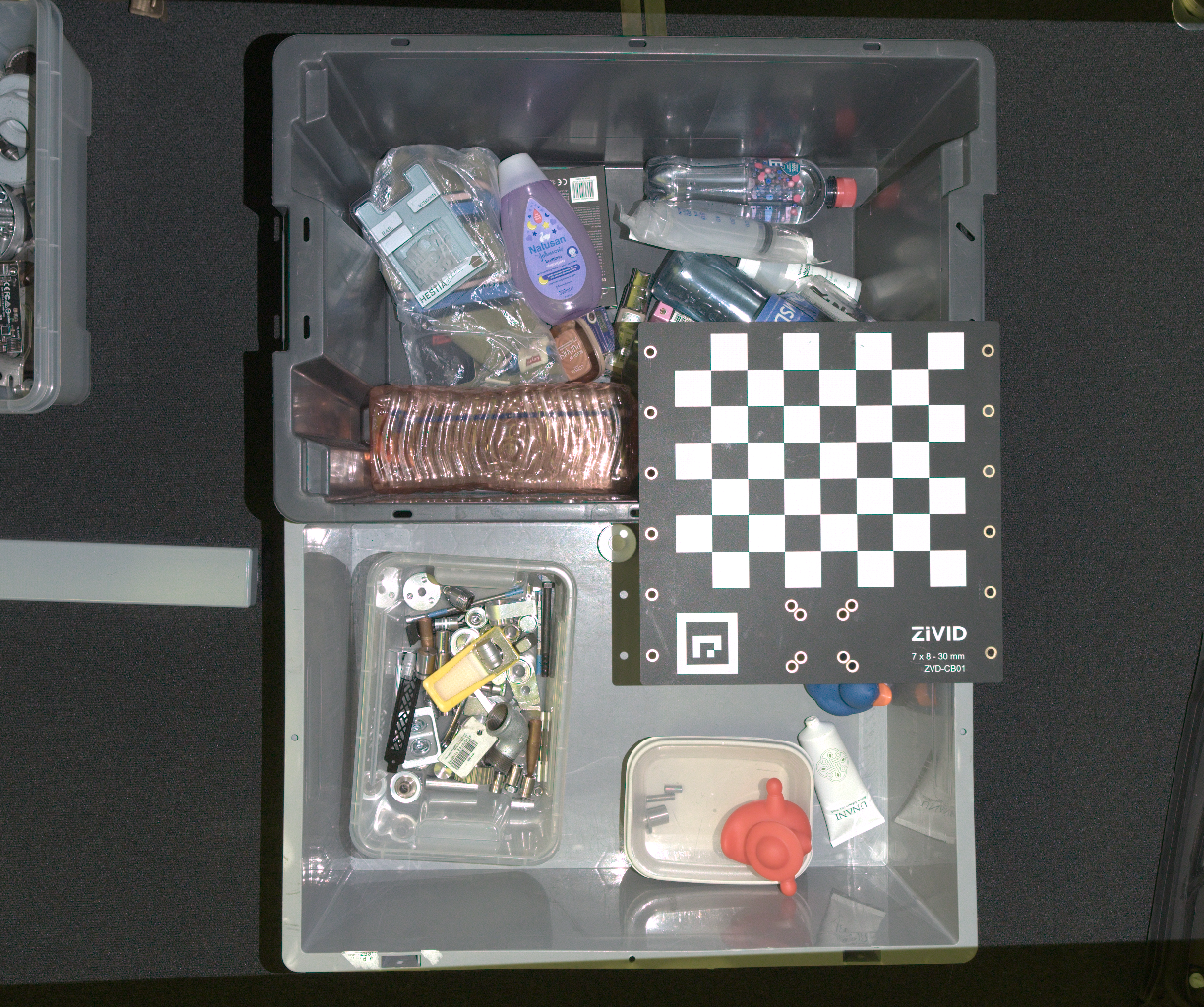
2x2 子采样 3D 和全分辨率 2D
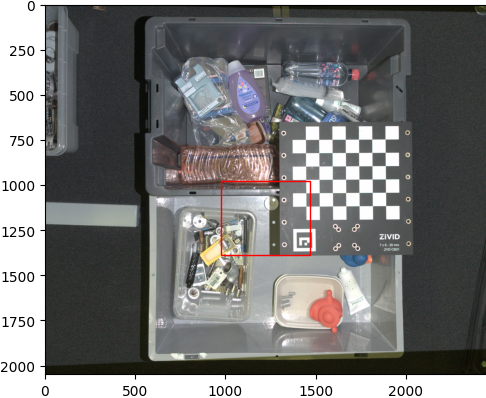
以下图片是使用全分辨率 2D 设置和子采样 3D 设置捕获的。3D 数据进一步进行上采样以匹配 2D 图像的分辨率。
auto settings2D = Zivid::Settings2D{
Zivid::Settings2D::Acquisitions{ Zivid::Settings2D::Acquisition{} },
Zivid::Settings2D::Sampling::Pixel::all,
};
auto settings = Zivid::Settings{
Zivid::Settings::Engine::stripe,
Zivid::Settings::Acquisitions{ Zivid::Settings::Acquisition{} },
Zivid::Settings::Sampling::Pixel::blueSubsample2x2,
Zivid::Settings::Sampling::Color::disabled,
Zivid::Settings::Processing::Resampling::Mode::upsample2x2,
};
settings_2d = zivid.Settings2D()
settings_2d.acquisitions.append(zivid.Settings2D.Acquisition())
settings_2d.sampling.pixel = zivid.Settings2D.Sampling.Pixel.all
settings = zivid.Settings()
settings.engine = "stripe"
settings.acquisitions.append(zivid.Settings.Acquisition())
settings.sampling.pixel = zivid.Settings.Sampling.Pixel.blueSubsample2x2
settings.sampling.color = zivid.Settings.Sampling.Color.disabled
settings.processing.resampling.mode = zivid.Settings.Processing.Resampling.Mode.upsample2x2
全分辨率 2D
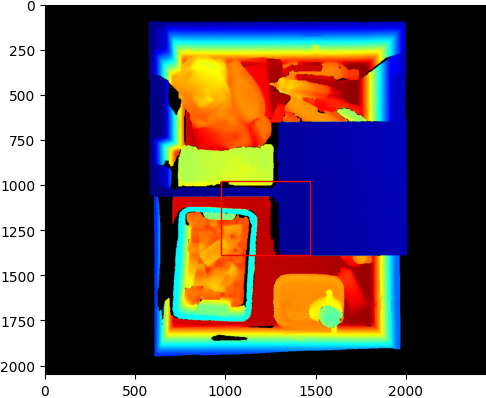
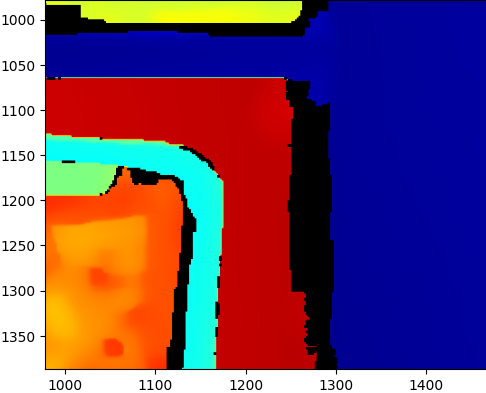
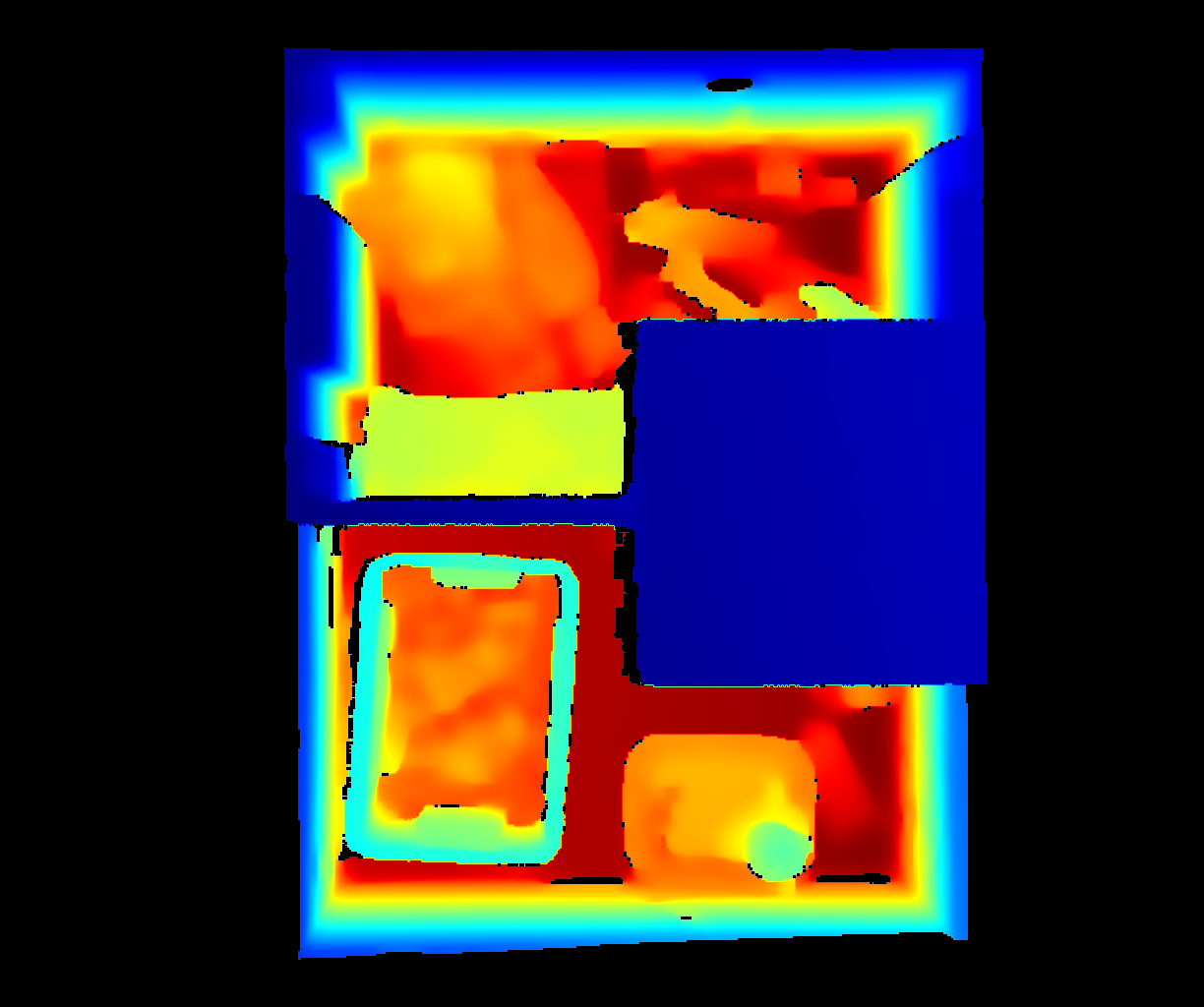
3D 深度图像
3D 点云
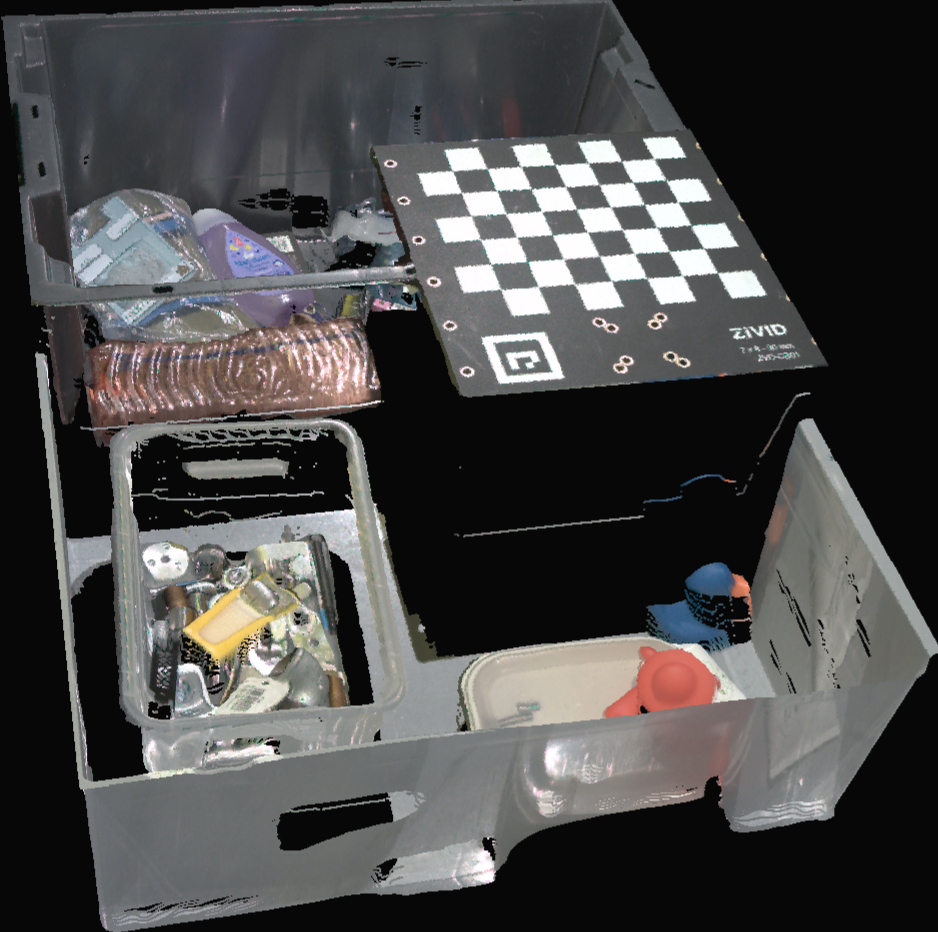
(旋转视角)
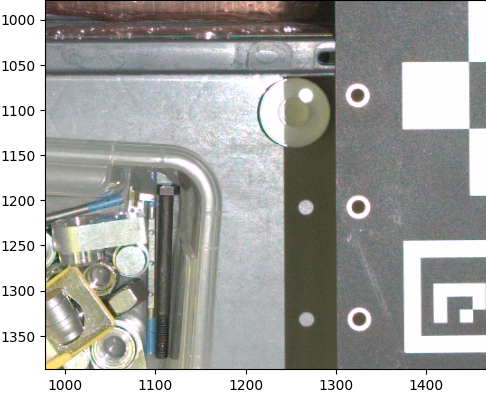
放大区域以更好地展示 2D -> 3D 对应关系

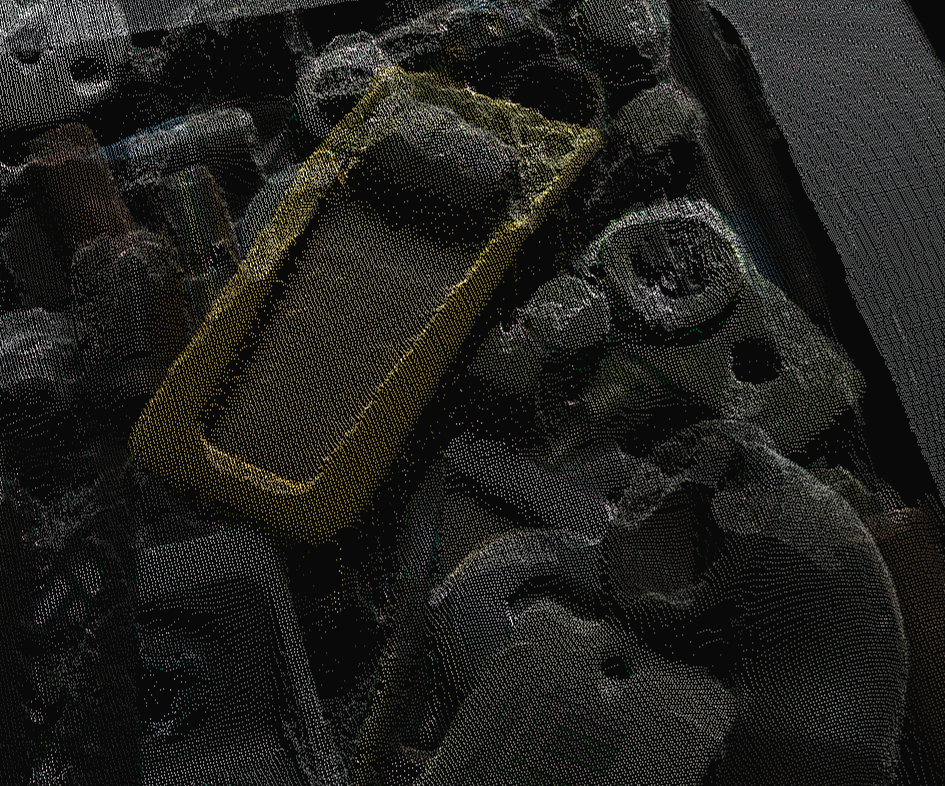
点云比较
全分辨率
子采样2x2
子采样2x2 + 上采样2x2
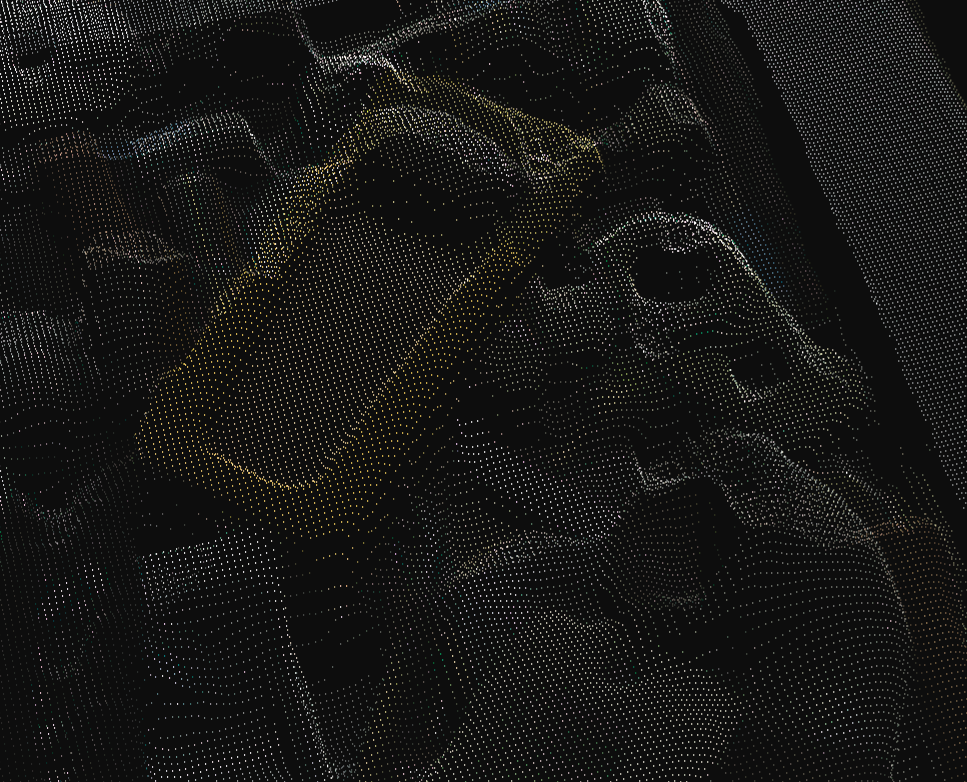
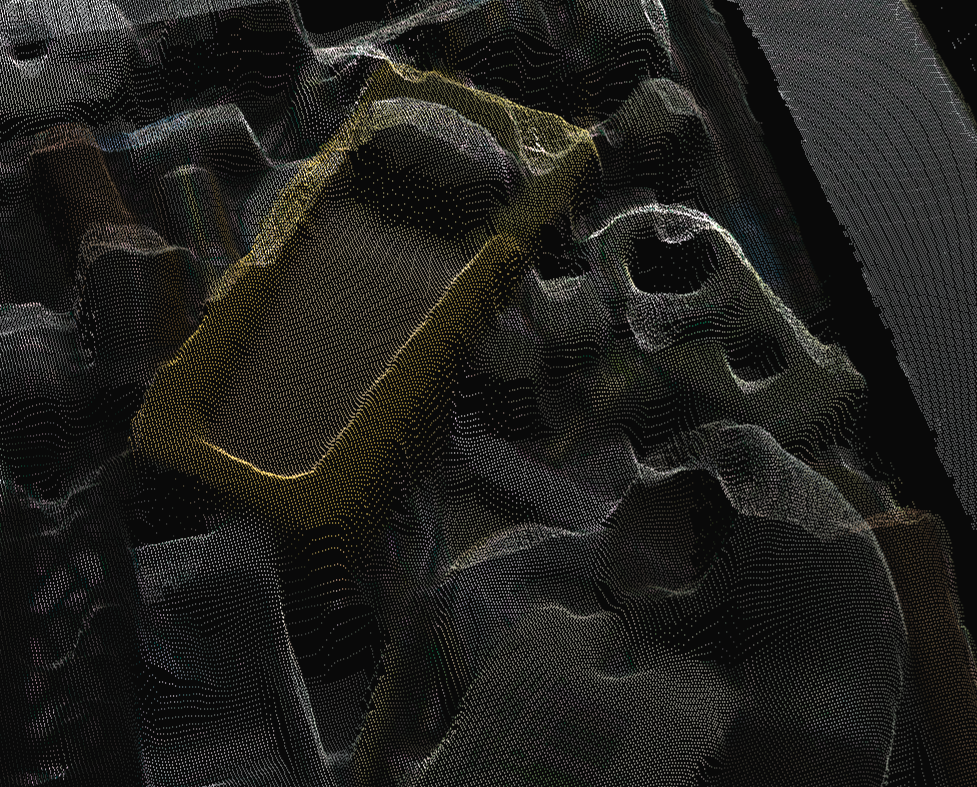
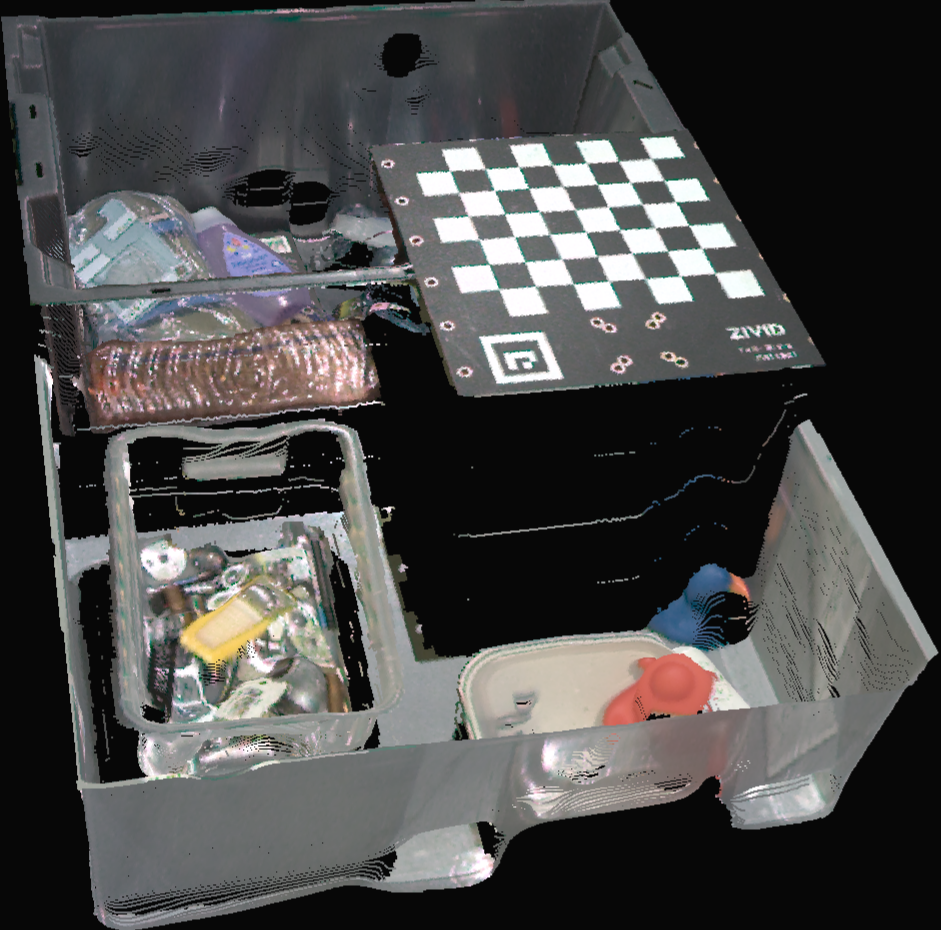
小心
上采样中的伪影
全分辨率

子采样2x2
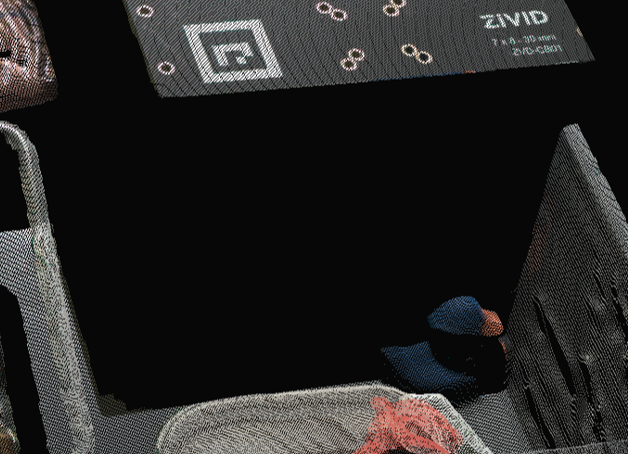
子采样2x2 + 上采样2x2
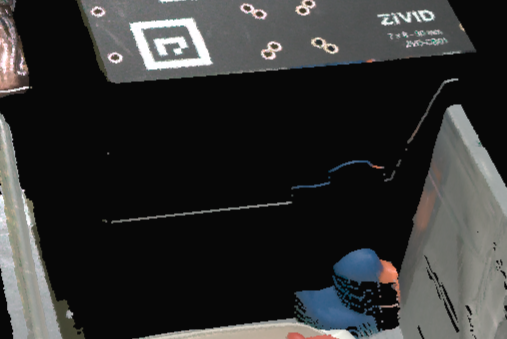
注意箱子底部和棋盘格之间的点串。这是由于将3D数据进行上采样以匹配2D数据分辨率而产生的伪影。
4x4 子采样 3D 和 2x2 子采样 2D
以下图片是使用 2x2 子采样 2D 设置捕获的。3D 设置是 4x4 子采样,然后进行 2x2 上采样以匹配 2D 图像的分辨率。

auto settings = Zivid::Settings{ Zivid::Settings::Acquisitions{ Zivid::Settings::Acquisition{} },
Zivid::Settings::Color{ Zivid::Settings2D{
Zivid::Settings2D::Acquisitions{ Zivid::Settings2D::Acquisition{} } } } };
auto model = camera.info().model();
switch(model.value())
{
case Zivid::CameraInfo::Model::ValueType::zividTwo:
case Zivid::CameraInfo::Model::ValueType::zividTwoL100:
{
settings.set(Zivid::Settings::Sampling::Pixel::blueSubsample2x2);
settings.set(Zivid::Settings::Processing::Resampling::Mode::upsample2x2);
settings.color().value().set(Zivid::Settings2D::Sampling::Pixel::all);
break;
}
case Zivid::CameraInfo::Model::ValueType::zivid2PlusM130:
case Zivid::CameraInfo::Model::ValueType::zivid2PlusM60:
case Zivid::CameraInfo::Model::ValueType::zivid2PlusL110:
{
settings.set(Zivid::Settings::Sampling::Pixel::blueSubsample4x4);
settings.set(Zivid::Settings::Processing::Resampling::Mode::upsample2x2);
settings.color().value().set(Zivid::Settings2D::Sampling::Pixel::blueSubsample2x2);
break;
}
case Zivid::CameraInfo::Model::ValueType::zivid2PlusMR130:
case Zivid::CameraInfo::Model::ValueType::zivid2PlusMR60:
case Zivid::CameraInfo::Model::ValueType::zivid2PlusLR110:
case Zivid::CameraInfo::Model::ValueType::zivid3XL250:
{
settings.set(Zivid::Settings::Sampling::Pixel::by4x4);
settings.set(Zivid::Settings::Processing::Resampling::Mode::upsample2x2);
settings.color().value().set(Zivid::Settings2D::Sampling::Pixel::by2x2);
break;
}
case Zivid::CameraInfo::Model::ValueType::zividOnePlusSmall:
case Zivid::CameraInfo::Model::ValueType::zividOnePlusMedium:
case Zivid::CameraInfo::Model::ValueType::zividOnePlusLarge:
{
throw std::runtime_error("Unsupported camera model '" + model.toString() + "'");
}
default: throw std::runtime_error("Unhandled enum value '" + model.toString() + "'");
}
settings = zivid.Settings(
acquisitions=[zivid.Settings.Acquisition()],
color=zivid.Settings2D(acquisitions=[zivid.Settings2D.Acquisition()]),
)
model = camera.info.model
if model in {zivid.CameraInfo.Model.zividTwo, zivid.CameraInfo.Model.zividTwoL100}:
settings.sampling.pixel = zivid.Settings.Sampling.Pixel.blueSubsample2x2
settings.processing.resampling.mode = zivid.Settings.Processing.Resampling.Mode.upsample2x2
settings.color.sampling.pixel = zivid.Settings2D.Sampling.Pixel.all
elif model in {
zivid.CameraInfo.Model.zivid2PlusM130,
zivid.CameraInfo.Model.zivid2PlusM60,
zivid.CameraInfo.Model.zivid2PlusL110,
}:
settings.sampling.pixel = zivid.Settings.Sampling.Pixel.blueSubsample4x4
settings.processing.resampling.mode = zivid.Settings.Processing.Resampling.Mode.upsample2x2
settings.color.sampling.pixel = zivid.Settings2D.Sampling.Pixel.blueSubsample2x2
elif model in {
zivid.CameraInfo.Model.zivid2PlusMR130,
zivid.CameraInfo.Model.zivid2PlusMR60,
zivid.CameraInfo.Model.zivid2PlusLR110,
zivid.CameraInfo.Model.zivid3XL250,
}:
settings.sampling.pixel = zivid.Settings.Sampling.Pixel.by4x4
settings.processing.resampling.mode = zivid.Settings.Processing.Resampling.Mode.upsample2x2
settings.color.sampling.pixel = zivid.Settings2D.Sampling.Pixel.by2x2
else:
raise ValueError(f"Unsupported camera model '{model}'")
2x2 子采样 2D
3D 深度图像
3D 点云
下采样
通常应用于点云来获得较低分辨率的点云,并且噪声水平较低。更多相关信息,请参阅 下采样 。
使用 Zivid SDK 对点云进行下采样有两种方法:
通过设置
Settings::Processing::Resampling来控制该功能,这意味着它是通过捕获设置进行控制的。通过 API
Zivid::PointCloud::downsample实现。
通过 Zivid::Settings::Processing::Resampling 进行下采样
当通过设置调用下采样时,由 frame.pointCloud() 返回的点云已经是下采样后的结果。
auto settings = Zivid::Settings{
Zivid::Settings::Engine::stripe,
Zivid::Settings::Acquisitions{ Zivid::Settings::Acquisition{} },
Zivid::Settings::Sampling::Pixel::all,
Zivid::Settings::Processing::Resampling::Mode::downsample2x2,
};
const auto cameraModel = camera.info().model();
if(cameraModel == Zivid::CameraInfo::Model::zivid2PlusM130
|| cameraModel == Zivid::CameraInfo::Model::zivid2PlusM60
|| cameraModel == Zivid::CameraInfo::Model::zivid2PlusL110)
{
// For 2+, we must lower Brightness from the default 2.5 to 2.2, when using `all` mode.
// This code can be removed by changing the Config.yml option 'Camera/Power/Limit'.
for(auto &a : settings.acquisitions())
{
a.set(Zivid::Settings::Acquisition::Brightness{ 2.2 });
}
}
std::cout << "Capturing frame" << std::endl;
const auto frame = camera.capture(settings);
const auto pointCloud = frame.pointCloud();
std::cout << "Getting BGRA image" << std::endl;
const auto image = pointCloud.copyColorsRGBA_SRGB();
const cv::Mat bgra(
image.height(),
image.width(),
CV_8UC4, // NOLINTNEXTLINE(cppcoreguidelines-pro-type-const-cast)
const_cast<void *>(static_cast<const void *>(image.data())));
std::cout << "Visualizing point cloud" << std::endl;
displayPointCloud(pointCloud, bgra);
settings = zivid.Settings()
settings.engine = "stripe"
settings.acquisitions.append(zivid.Settings.Acquisition())
settings.sampling.pixel = zivid.Settings.Sampling.Pixel.all
settings.processing.resampling.mode = zivid.Settings.Processing.Resampling.Mode.downsample2x2
model = camera.info.model
if model in (
zivid.CameraInfo.Model.zivid2PlusM130,
zivid.CameraInfo.Model.zivid2PlusM60,
zivid.CameraInfo.Model.zivid2PlusL110,
):
# For 2+, we must lower Brightness from the default 2.5 to 2.2, when using `all` mode.
# This code can be removed by changing the Config.yml option 'Camera/Power/Limit'.
for acquisition in settings.acquisitions:
acquisition.brightness = 2.2
print("Capturing frame")
with camera.capture(settings) as frame:
point_cloud = frame.point_cloud()
xyz = point_cloud.copy_data("xyz")
rgba = point_cloud.copy_data("rgba_srgb")
print("Visualizing point cloud")
display_pointcloud(xyz, rgba)
通过 Zivid::PointCloud::downsample 进行下采样
下面的示例与前面的示例相同,只不过下采样操作是在由 frame.pointCloud() 返回的 Zivid::PointCloud 实例上调用的。
auto settings = Zivid::Settings{
Zivid::Settings::Engine::stripe,
Zivid::Settings::Acquisitions{ Zivid::Settings::Acquisition{} },
Zivid::Settings::Sampling::Pixel{ Zivid::Settings::Sampling::Pixel::all },
};
const auto cameraModel = camera.info().model();
if(cameraModel == Zivid::CameraInfo::Model::zivid2PlusM130
|| cameraModel == Zivid::CameraInfo::Model::zivid2PlusM60
|| cameraModel == Zivid::CameraInfo::Model::zivid2PlusL110)
{
// For 2+, we must lower Brightness from the default 2.5 to 2.2, when using `all` mode.
// This code can be removed by changing the Config.yml option 'Camera/Power/Limit'.
for(auto &a : settings.acquisitions())
{
a.set(Zivid::Settings::Acquisition::Brightness{ 2.2 });
}
}
std::cout << "Capturing frame" << std::endl;
const auto frame = camera.capture(settings);
auto pointCloud = frame.pointCloud();
pointCloud.downsample(Zivid::PointCloud::Downsampling::by2x2);
std::cout << "Getting BGRA image" << std::endl;
const auto image = pointCloud.copyColorsRGBA_SRGB();
const cv::Mat bgra(
image.height(),
image.width(),
CV_8UC4, // NOLINTNEXTLINE(cppcoreguidelines-pro-type-const-cast)
const_cast<void *>(static_cast<const void *>(image.data())));
std::cout << "Visualizing point cloud" << std::endl;
displayPointCloud(pointCloud, bgra);
settings = zivid.Settings()
settings.engine = "stripe"
settings.acquisitions.append(zivid.Settings.Acquisition())
settings.sampling.pixel = zivid.Settings.Sampling.Pixel.all
model = camera.info.model
if model in (
zivid.CameraInfo.Model.zivid2PlusM130,
zivid.CameraInfo.Model.zivid2PlusM60,
zivid.CameraInfo.Model.zivid2PlusL110,
):
# For 2+, we must lower Brightness from the default 2.5 to 2.2, when using `all` mode.
# This code can be removed by changing the Config.yml option 'Camera/Power/Limit'.
for acquisition in settings.acquisitions:
acquisition.brightness = 2.2
print("Capturing frame")
with camera.capture(settings) as frame:
point_cloud = frame.point_cloud()
point_cloud.downsample(zivid.PointCloud.Downsampling.by2x2)
xyz = point_cloud.copy_data("xyz")
rgba = point_cloud.copy_data("rgba_srgb")
print("Visualizing point cloud")
display_pointcloud(xyz, rgba)
下采样可以就地完成,即直接修改当前点云。
还可以将下采样的点云作为新的点云实例,这不会改变现有的点云。
2D 下采样示例
全分辨率
子采样
下采样