Sampling(采样) - 3D
Pixel(像素)
Settings::Sampling::Pixel 参数用于选择投影图案和采样像素的光信号颜色。根据相机型号,设置将有不同的选项。
Zivid 2/2+ |
Zivid 2+R/3 |
|
|---|---|---|
|
✓ |
✓ |
|
✓ |
|
|
✓ |
|
|
✓ |
|
|
✓ |
|
|
✓ |
|
|
✓ |
相机的分辨率如下所示:
3D 捕获 |
Zivid 3 |
Zivid 2+/2+R |
Zivid 2 |
|---|---|---|---|
全分辨率 [1] |
2816 x 2816 |
2448×2048 |
1944×1200 |
2x2 [1] |
1408 x 1408 |
1224×1024 |
972×600 |
4x4 [1] |
704 x 704 |
612×512 |
不支持 |
当设置为 all 时,所有像素均被采样,点云具有全分辨率。
下图展示了传感器网格和相关索引。
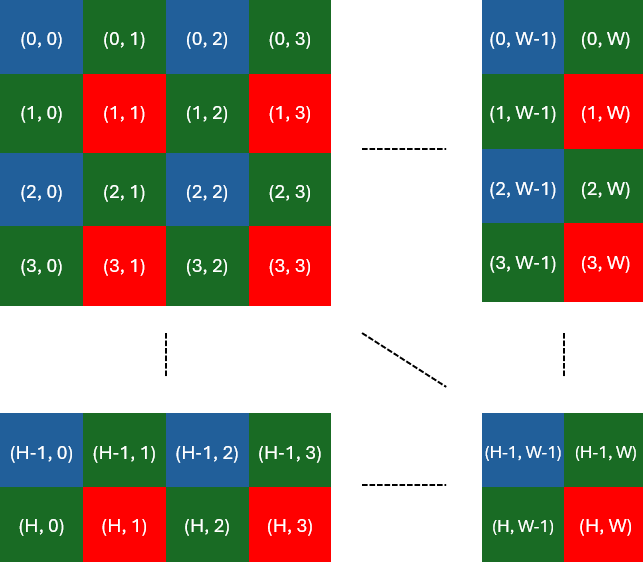
当我们进行子采样/下采样(2x2)时,我们降得到原始点数量的 1/4 的点。
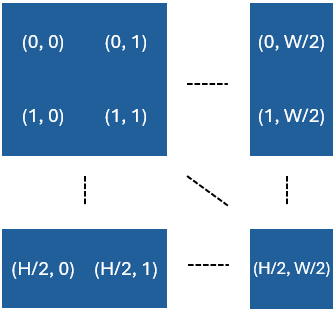
这意味着,在对 2x2 进行子采样或下采样之后,x 和 y 轴上的点数将除以 2。对于 4x4 进行子采样或下采样,x 和 y 轴上的点数将除以 4。
例如,对于 Zivid 2+ M130,两个像素之间的空间距离为 0.32 毫米 @ 1300 毫米工作距离。通过 2x2 子采样,在相同工作距离下,该距离加倍至 0.64 毫米。
这不会影响深度分辨率;点精度决定了这一点。
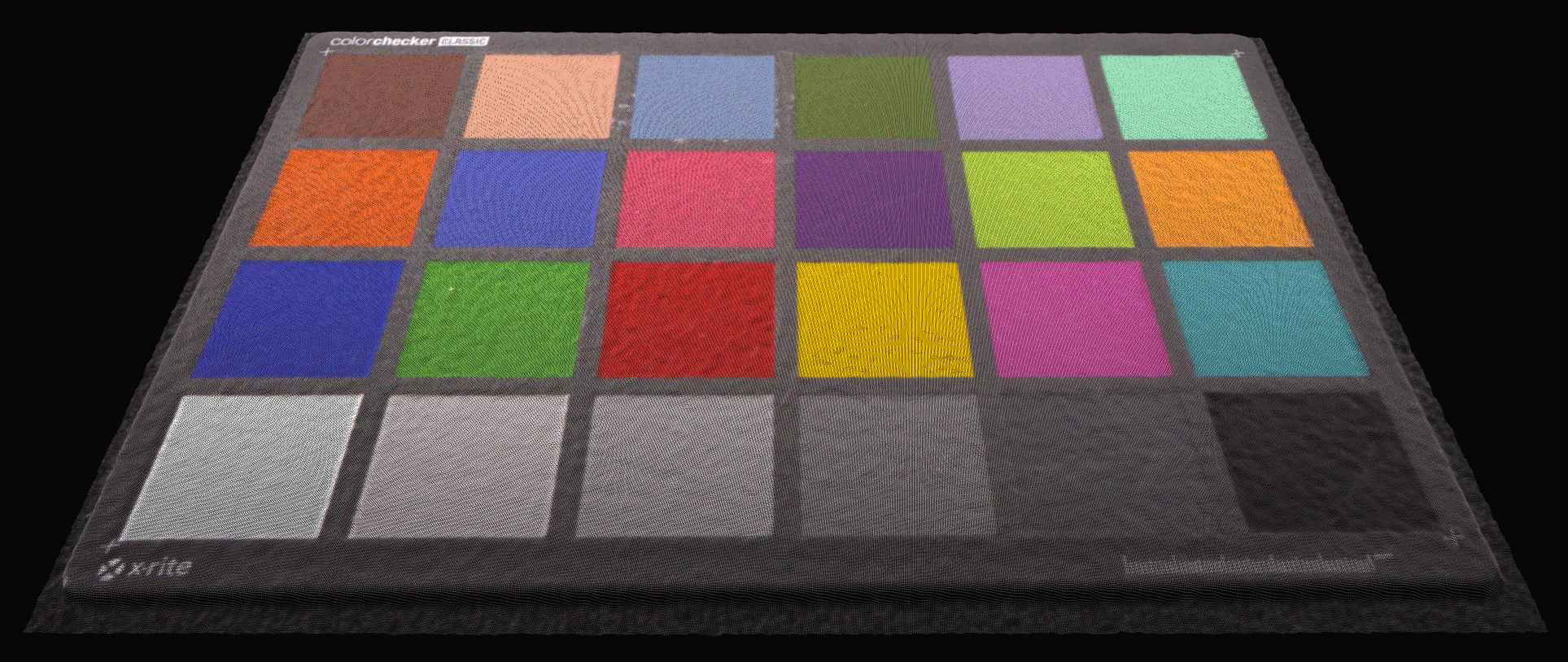 当 Sampling::Pixel 设置为 all 时,点云为全分辨率
当 Sampling::Pixel 设置为 all 时,点云为全分辨率
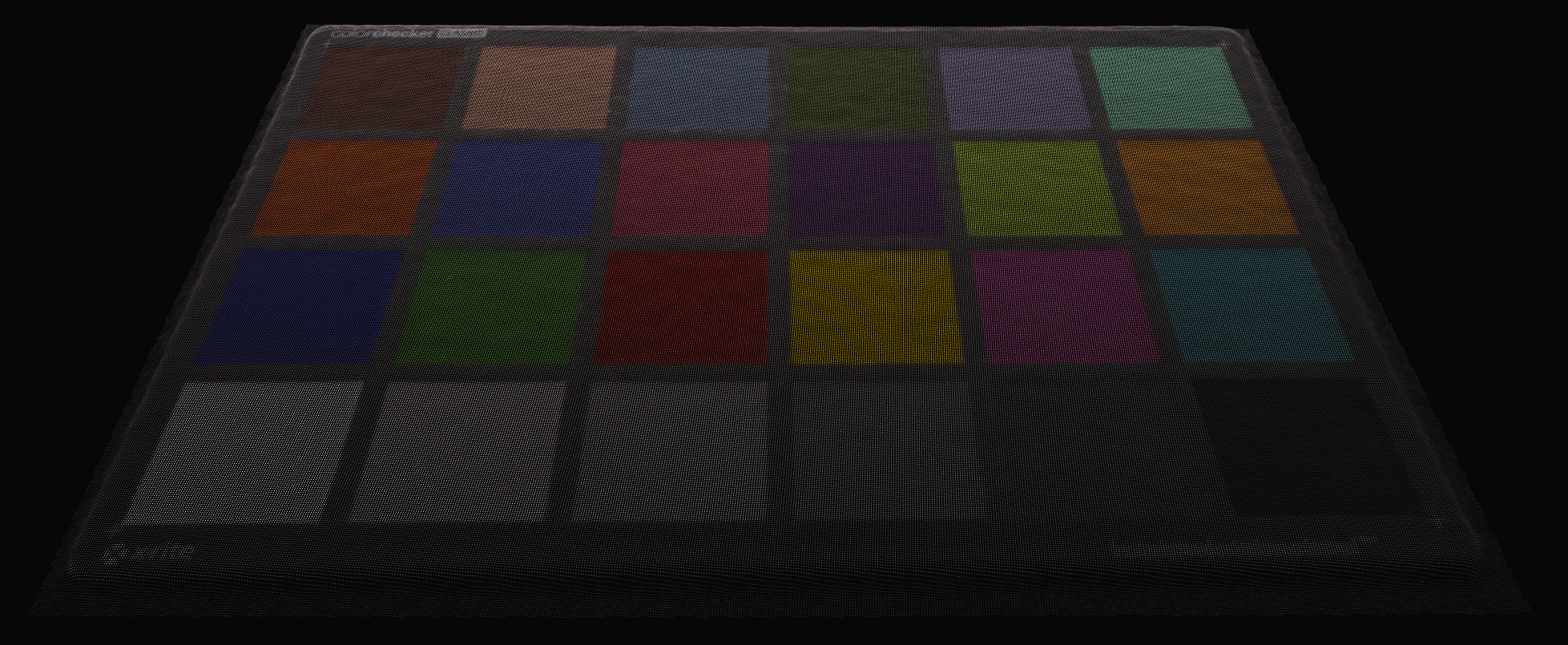 当 Sampling::Pixel 设置为除 all 之外的值时,点云的分辨率较小
当 Sampling::Pixel 设置为除 all 之外的值时,点云的分辨率较小
子采样减少了采集和捕获时间,因为捕获和处理的数据更少。此外,它还消除了对数据进行下采样以将其转换为更易于管理的大小的需要,从而减少了存储和后处理要求。使用四分之一的数据时,Zivid 后处理(例如 法线 和 转换 )和用户后处理(例如 CAD 匹配)变得更快。
选择特定的颜色通道也有助于减少噪音和环境光的影响。在大多数情况下,投射蓝光比红光能提供更好的数据。在 2+ MR60/MR130/LR110 上,我们总是更喜欢投射蓝光。
版本历史
SDK |
变更 |
|---|---|
2.17.0 |
新增对 Zivid 3 的支持。 |
2.14.0 |
通过 |
2.11.0 |
添加了对 |