Zivid Calibration Object
Zivid 支持以下标定对象:
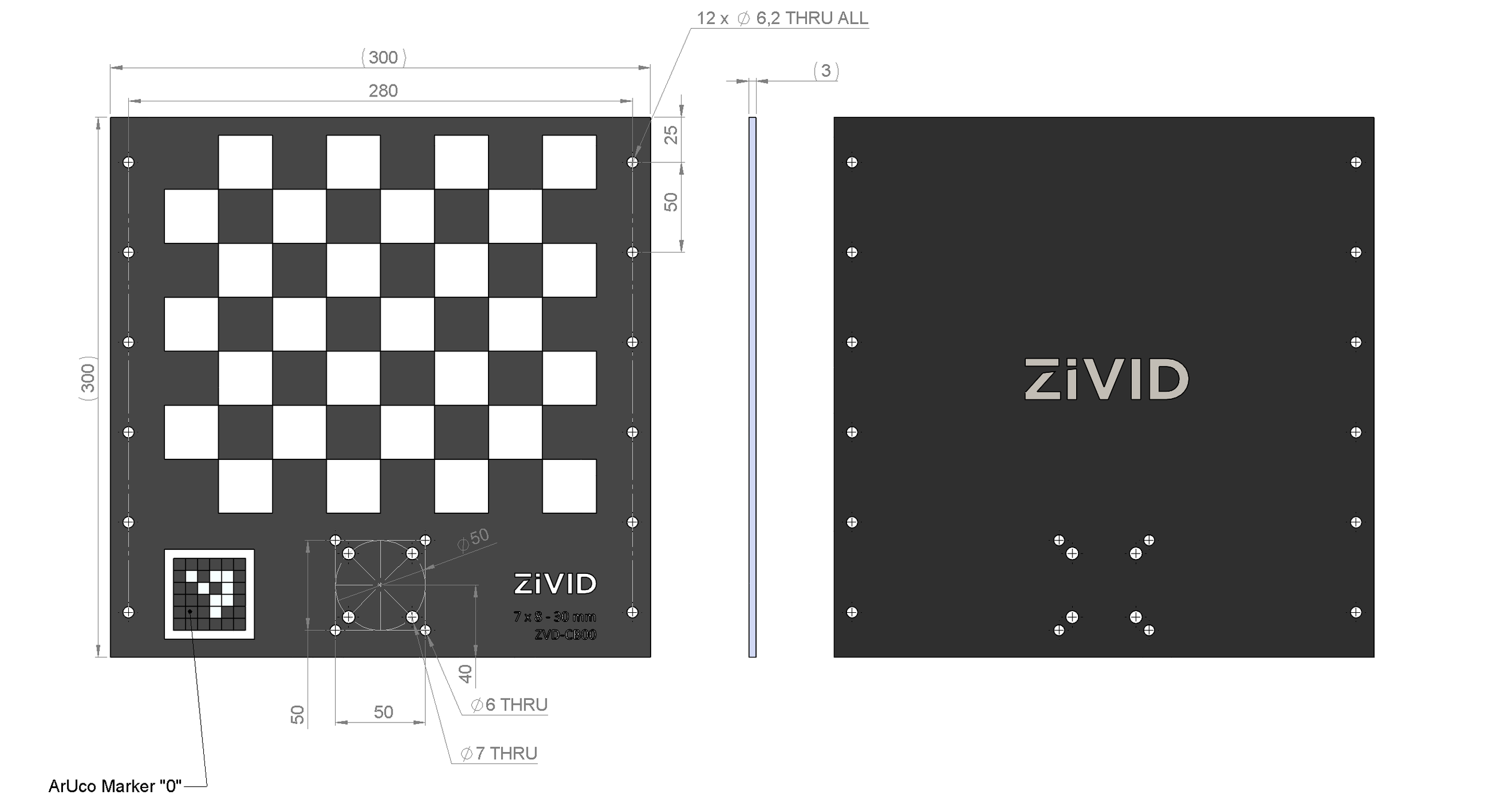
Zivid Calibration Boards
ArUco Markers
Zivid Calibration Boards
Zivid 标定板可在 Zivid WebShop 上购买。这些标定板也可用于相机维护,例如 现场标定 。在使用该标定板进行手眼标定时,每次捕获时都需要检测到棋盘格和标记点。
ArUco Markers
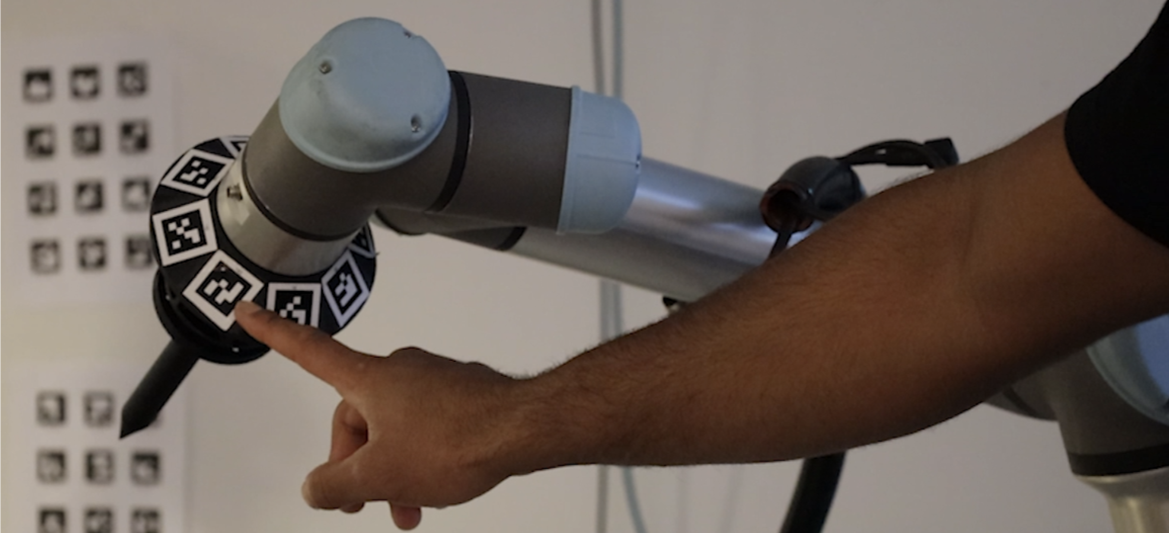
Zivid 手眼标定可以使用一个或多个 ArUco 标记作为标定对象。一般来说,使用的标记越多越好。您可以在 https://chev.me/arucogen/ 生成和打印 ArUco 标记。确保标记打印在平坦的表面上。我们支持的 OpenCV 字典包括 4x4、5x5、6x6 和 7x7 图案。使用 ArUco 标记进行手眼标定的一个好处是它们尺寸很小。另一个好处是,在每次捕获中并非所有标记都需要可检测到。
ArUco 标记需要多大?
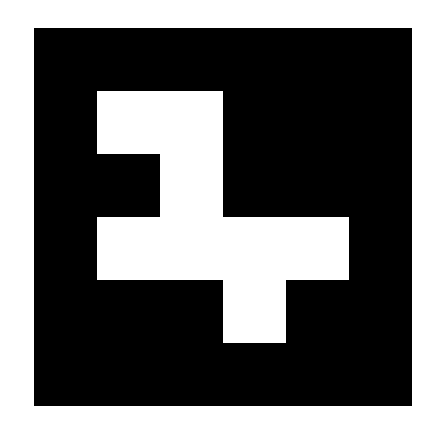
我们建议在最远的成像距离处,每个 ArUco 位上至少有 7 个像素。下图显示了 ArUco 标记的放大图像,其中每个 ArUco 位由 8 个像素表示。以下示例解释了如何确定所需的最小尺寸(以毫米为单位)。
对于 4x4 ArUco 字典,有 6 位(4 个内部位和 2 个外部位),因此每个标记的边至少应有 42 个像素。
假设您使用的是 Zivid 2+ M130 相机,最大成像距离为 2 米。此时相机的空间分辨率为 0.5 毫米(请参阅 计算FOV和成像距离 )。将 0.5 毫米乘以 42 像素可得出 21 毫米。
因此,要在最远 2 米的距离内使用 Zivid 2+ M130,ArUco 标记的尺寸至少应为 21 毫米。
备注
您应该在 ArUco 标记周围留出一些空白,至少留出 1 位边框。对于上例,这意味着每边留出 3.5 毫米(7 个像素乘以 0.5 毫米)。
Which Calibration Object to use?
We recommend using the Zivid calibration board whenever possible. Choose the board model based on the camera model you are using, as shown in the table below:
相机型号 |
推荐的标定板 |
|---|---|
Zivid 2 M70 |
7x8 - 30 mm |
Zivid 2 L100 |
7x8 - 30 mm |
Zivid 2+ MR130 |
7x8 - 30 mm |
Zivid 2+ LR110 |
7x8 - 30 mm |
Zivid 2+ MR60 |
5x6 - 20 mm |
Zivid 3 XL250 |
7x8 - 30 mm |
Use ArUco markers for the following use case:
Eye-to-hand configuration
Calibration object needs to be permanently mounted on the robot
Zivid calibration board is too large
Now that you have selected the calibration object, check How to run and integrate Zivid Hand-Eye Calibration.
版本历史
SDK |
变更 |
|---|---|
2.16.0 |
增加了对较小尺寸的标定板 ZVDA-CB02 (5x6 20 mm) 的支持。 |
2.14.0 |
取消了对 9x6 灰白棋盘格的支持。 |
2.13.0 |
增加了对 ArUco 标记的支持。 |