Positioning Correctly
가장 일반적이고 권장되는 방법은 촬영 장소 바로 위에 카메라를 설치하는 것입니다.
특히 반사율이 매우 높고 특히 어두운 넓은 표면을 촬영하는 데 유용합니다. 이 경우, 카메라를 물체에 수직으로 장착하여 카메라로 돌아오는 신호를 최대화하는 것이 좋습니다.
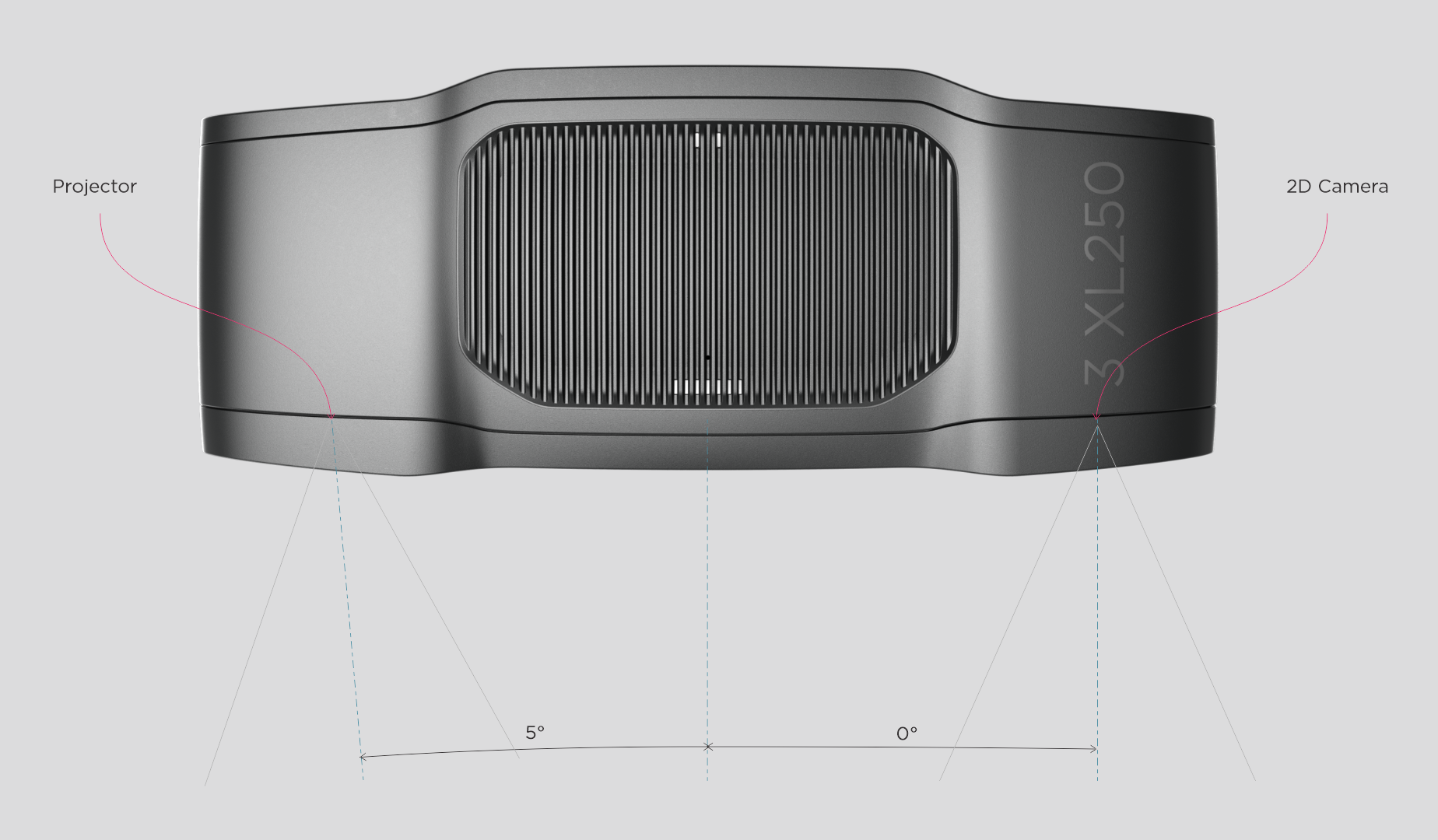
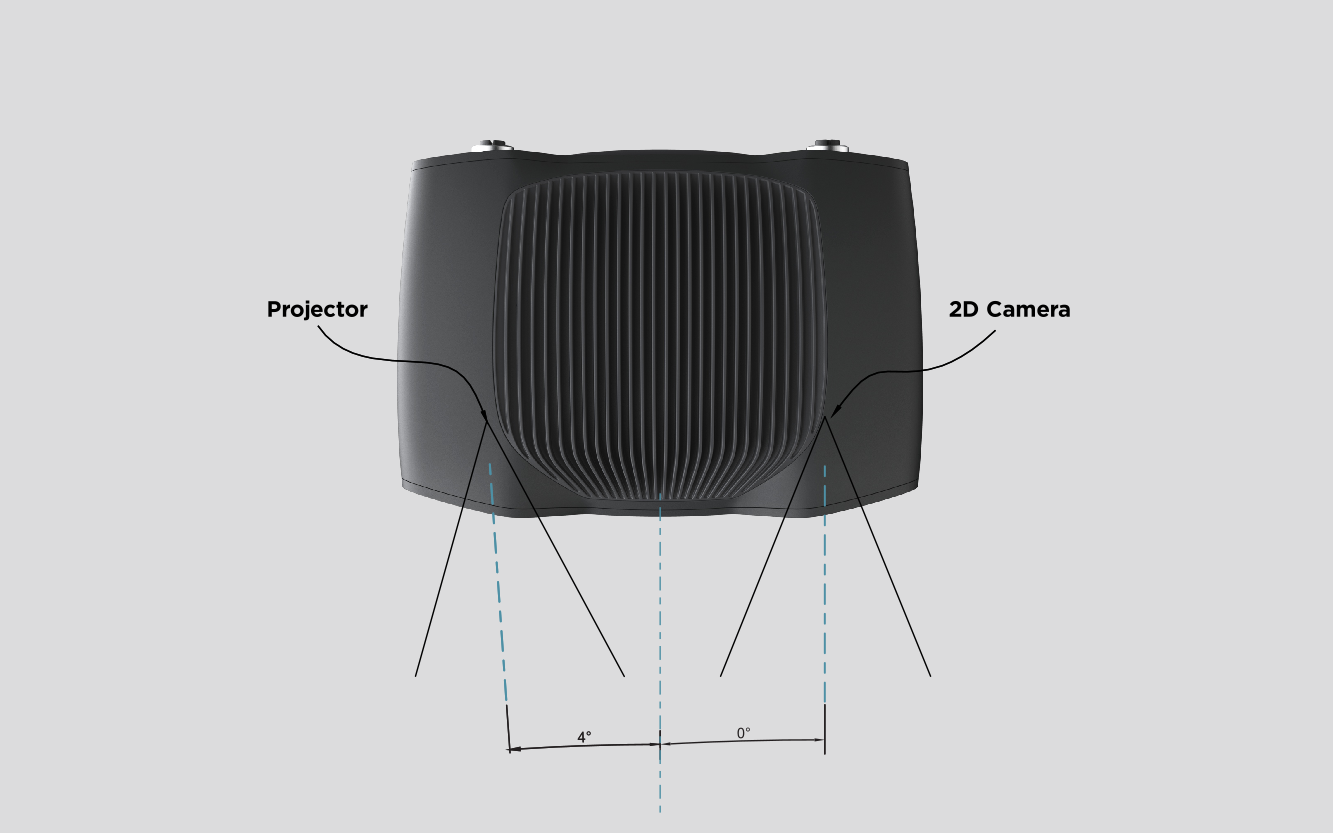
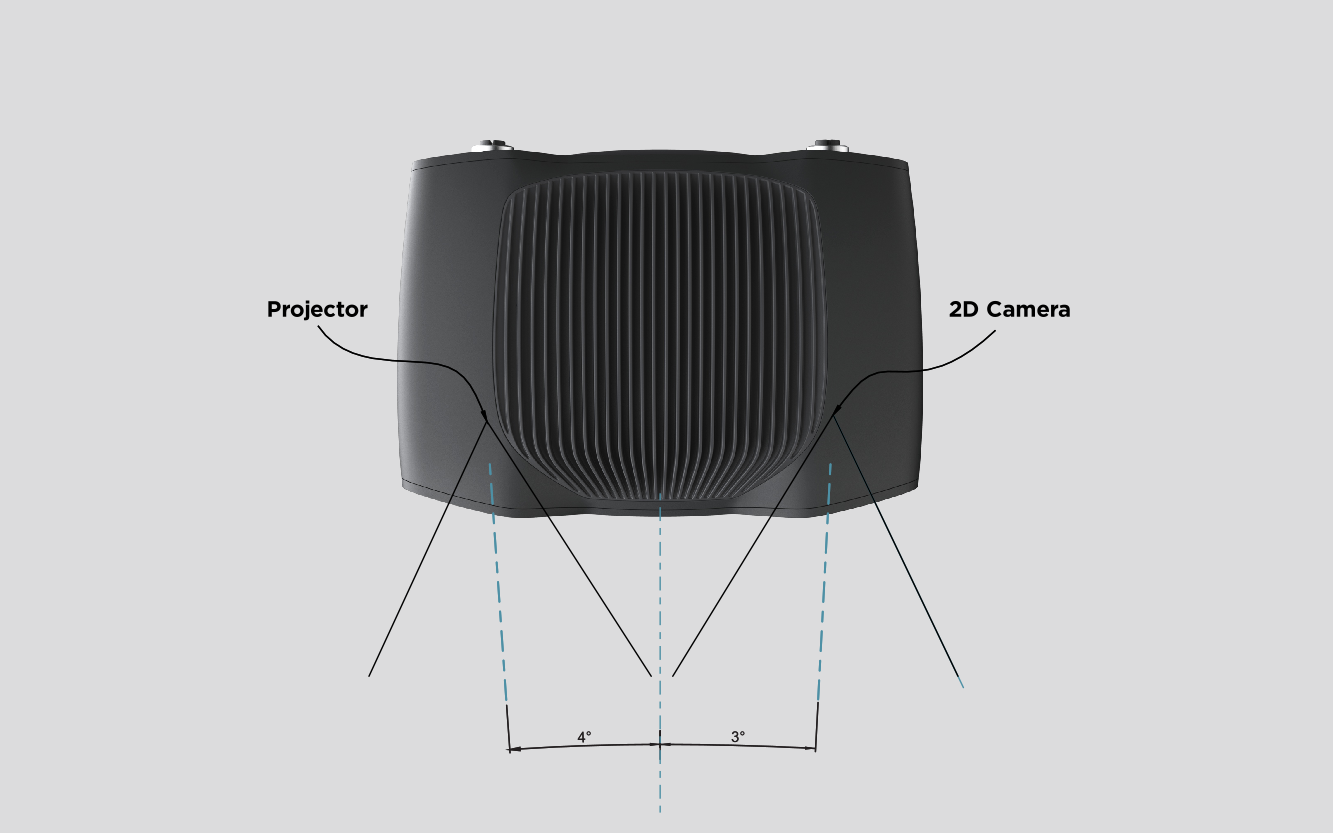
2D 카메라와 프로젝터는 중심축에 대해 각도를 갖습니다. 카메라를 장면에 수직으로 배치하려는 경우 이 점을 고려해야 합니다.

빈 벽에서 강한 상호 반사가 발생하는 경우, Zivid 카메라 프로젝터를 빈 뒤쪽 가장자리 위나 뒤쪽 모서리 위에 설치할 수 있습니다(아래 이미지 참조). 2D 카메라가 빈 중앙을 향하도록 프로젝터를 팬 및 틸트합니다. 프로젝터 광선은 프로젝터에 가장 가까운 두 벽의 안쪽 표면에 닿지 않아야 하며, 두 벽과 거의 평행해야 합니다.
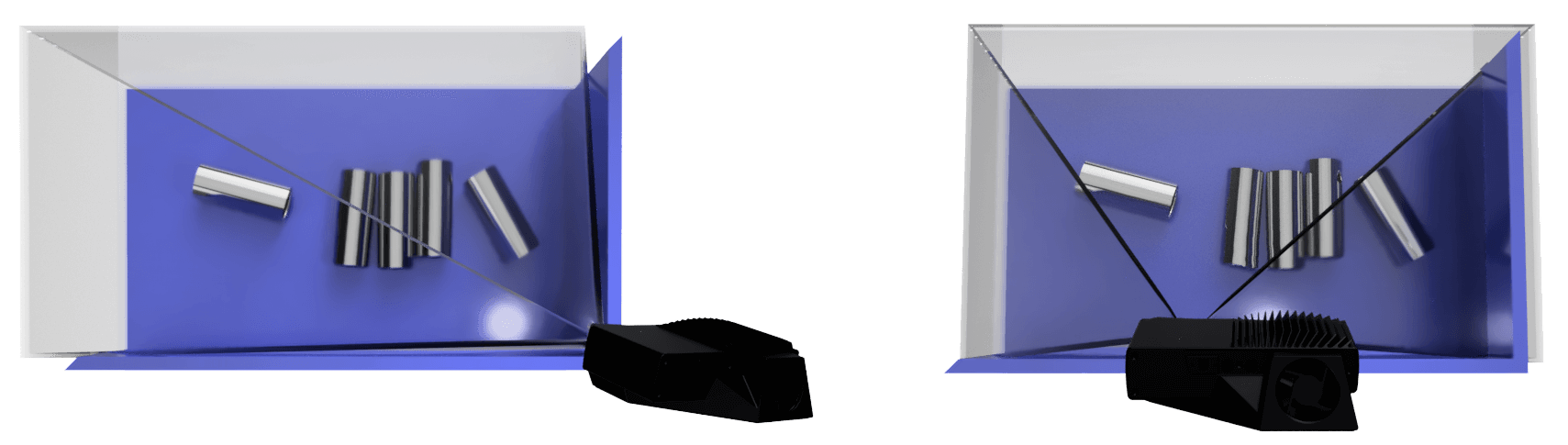
이런 방식으로 카메라를 장착하면 빈 벽에서의 상호 반사가 최소화되고, 장면 위쪽 공간이 확보되어 도구와 로봇이 더 쉽게 접근할 수 있습니다.
Zivid cameras do not need any additional light source; the projector provides all the illumination required for both 2D and 3D. A strong and focused light, such as a spotlight mounted right above the bin, can reflect directly into the camera, saturating the sensor and causing blooming in the 2D image. Avoid mounting the camera where it looks straight into such a reflection. To minimize this, remove the extra light if it is not needed, or try slightly moving or tilting the camera. For more on capturing in these conditions, see Dealing with Strong Ambient Light.
장면에 구분선을 가진 빈 혹은 여러 빈이 있는 경우 Occlusion(가림 현상)을 최소화하도록 카메라를 장착합니다. Occlusion은 빈 피킹에서 고정 장착 카메라에 특히 중요합니다. 계산기를 사용하여 Calculate Occlusion 을 미리 확인 할 수 있습니다.
물리적 설치를 위한 카메라 및 카메라 Mounts 의 Mounting Specifications 을 확인하고, 로봇에 장착된 카메라가 있는 경우 Mechanical Considerations for Robot Mounting 을 읽어 보십시오. 이 튜토리얼은 로봇 장착을 위한 액세서리 및 장비의 구매 또는 설계, 통합 및 설치와 관련하여 올바른 결정을 내리는 데 도움이 됩니다.
다음 섹션에서는 selecting Camera Settings based on capture speed 요구 사항에 대해 안내합니다.