Touch Test Unsafe to perform due to Bad Hand-Eye Calibration (Calibration Board Moved or Shifted)
Problem
The hand-eye calibration results are bad, and it is unsafe to perform the touch test.
Hand-eye matrix |
Calibration residuals |
Projection verification |
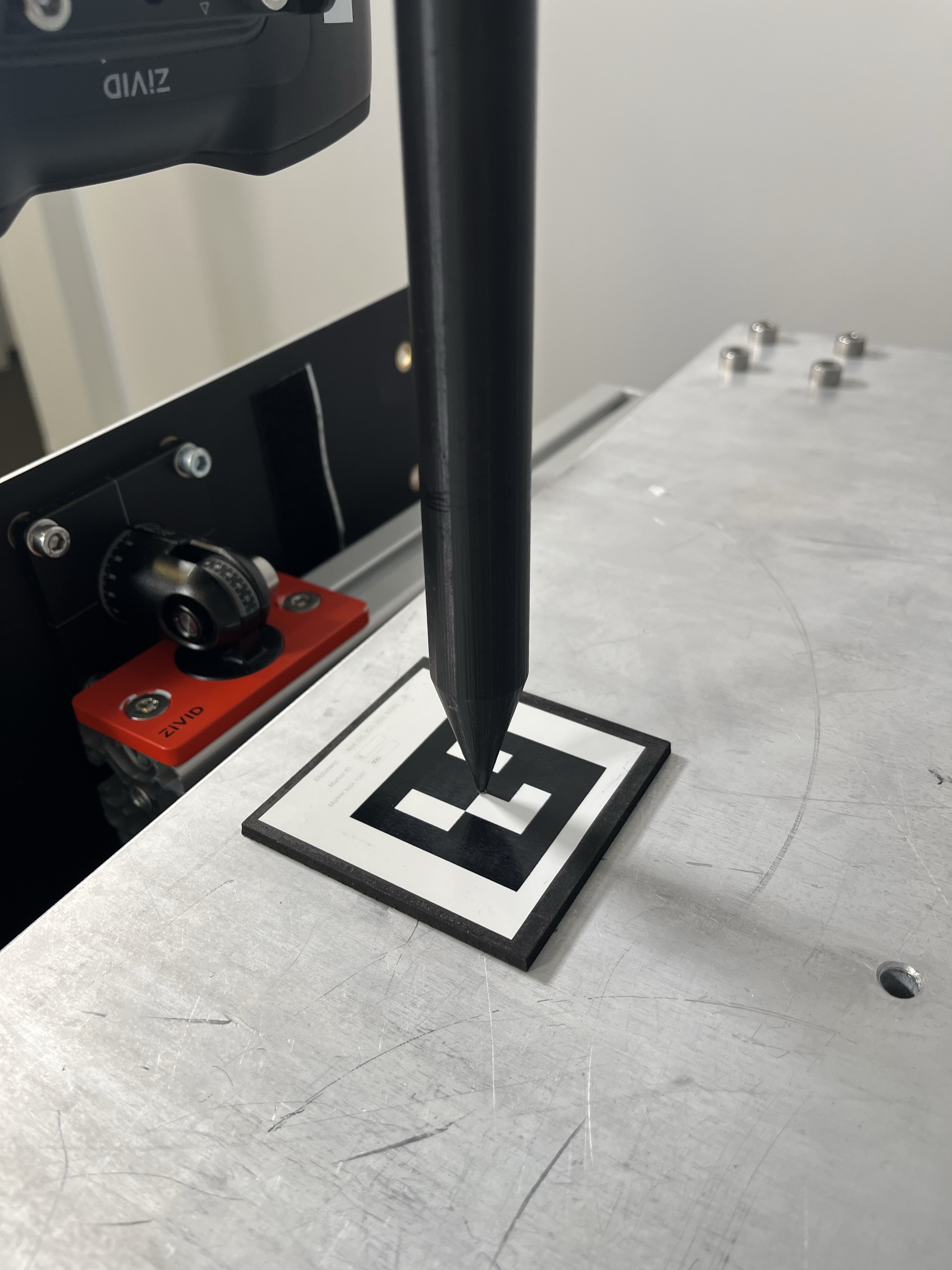
Touch test |
|---|---|---|---|
Bad |
Bad |
Bad |
Unsafe |
Example of bad hand-eye results
Hand-Eye Calibration Matrix
0.994 |
0.040 |
0.099 |
-84.190 |
-0.042 |
0.999 |
0.021 |
-84.129 |
-0.098 |
-0.025 |
0.995 |
147.697 |
0 |
0 |
0 |
1 |
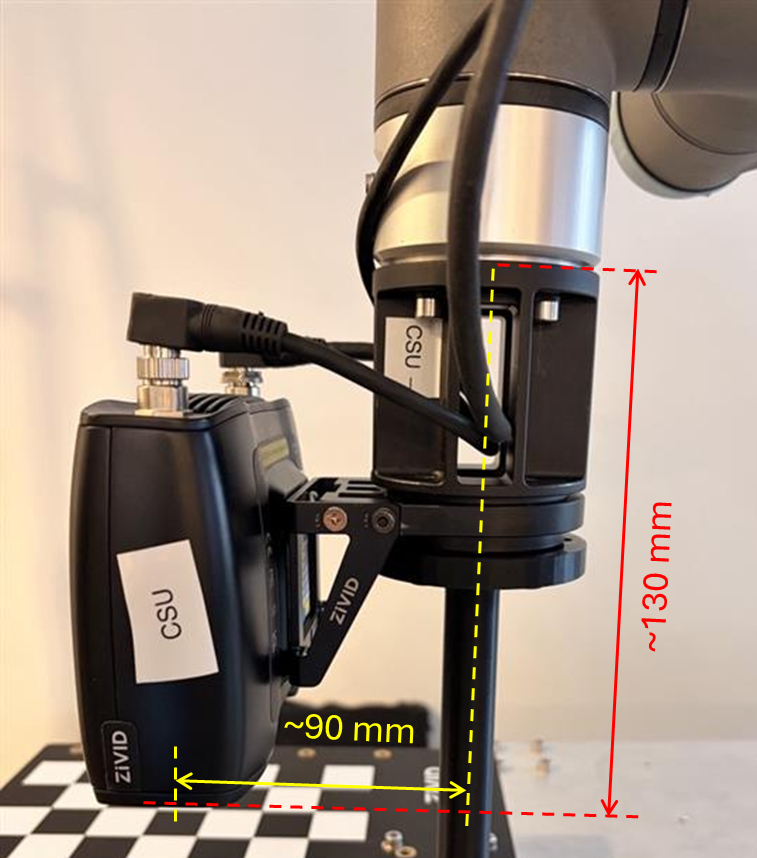
The Hand-Eye Calibration Matrix does not look correct because several of its values differ more than expected from the physical measurements. The differences are not extremely large, but they are beyond what would be considered reasonable for this setup.
The value 147.697 should be approximately 130 mm, and the value -84.129 should be roughly 90 mm. At this stage we ignore the sign (+/-), because it depends on the coordinate-system definitions; we focus only on the distances.
Residuals
The calibration residuals are also noticeably larger than expected, roughly an order of magnitude higher. For smaller robots, we expect the residuals to in the sub-millimeter range, while for larger robots, the residuals can be in the millimeter range. As for the rotational component of the residuals, we expect them to be in the sub-degree range.
N (Poses) |
Rotation avg (deg) |
Rotation max (deg) |
Translation avg (mm) |
Translation max (mm) |
|---|---|---|---|---|
13 |
2.449 |
5.590 |
4.627 |
10.946 |
Pose |
Rotation (deg) |
Translation (mm) |
|---|---|---|
1 |
5.590 |
10.946 |
2 |
4.864 |
6.151 |
3 |
5.294 |
5.707 |
4 |
1.682 |
7.975 |
5 |
1.537 |
4.446 |
6 |
1.570 |
6.958 |
7 |
1.738 |
2.492 |
8 |
0.950 |
2.917 |
9 |
1.973 |
5.113 |
10 |
1.546 |
0.831 |
11 |
1.851 |
0.773 |
12 |
1.701 |
3.509 |
13 |
1.544 |
2.329 |
Verification by Projection technically succeeds, but the resulting error is still too large to be acceptable. One should be very critical of projection verification, as the projection error may seem acceptable even if the hand-eye calibration is incorrect.
Such results strongly suggest that the hand-eye calibration is not correct, and that the touch test will fail if attempted.
Potential Cause
- Eye-in-hand:
The calibration board moved during the acquisition of the dataset.
- Eye-to-hand:
Either the camera or the calibration board moved during the acquisition of the dataset.
Any movement of the calibration board (eye-in-hand) or the camera/board-in-flange (eye-to-hand) during dataset acquisition breaks the assumption of rigid geometry that hand-eye calibration relies on. This introduces inconsistent robot-camera relationships from frame to frame, causing the solver to converge to a transform that does not match the physical setup.
As a result, you may see high residuals, poor projection accuracy, and a hand-eye matrix whose distances differ from real geometry. In severe cases, the resulting transform can make touch test validation unsafe due to risk of collision.
Potential Solution
Ensure the camera and calibration board are securely mounted and will not move during data acquisition.
Repeat the hand-eye calibration using the same dataset.
Verify the hand-eye calibration results (matrix, residuals, projection).
Re-run the touch test (if the hand-eye calibration results are good).