处理强环境光
环境光对于Zivid相机而言是指什么?
Zivid相机除了本身的投影仪以外,不需要任何其它光源来获取3D数据。 Zivid相机用于生成点云的信号是由投影仪创建的场景照度。 外部环境光产生的场景照度对于Zivid来说是噪声。点云质量很大程度上取决于 Signal-to-Noise ratio (信噪比)。因此,环境光越弱,噪声越低,点云就越好。
备注
照度的单位为勒克斯 (lx) ,是入射到单位面积表面上的总光功率。光功率的单位为流明 (lm) ,是单位时间内光源发出的可见光总量的量度。
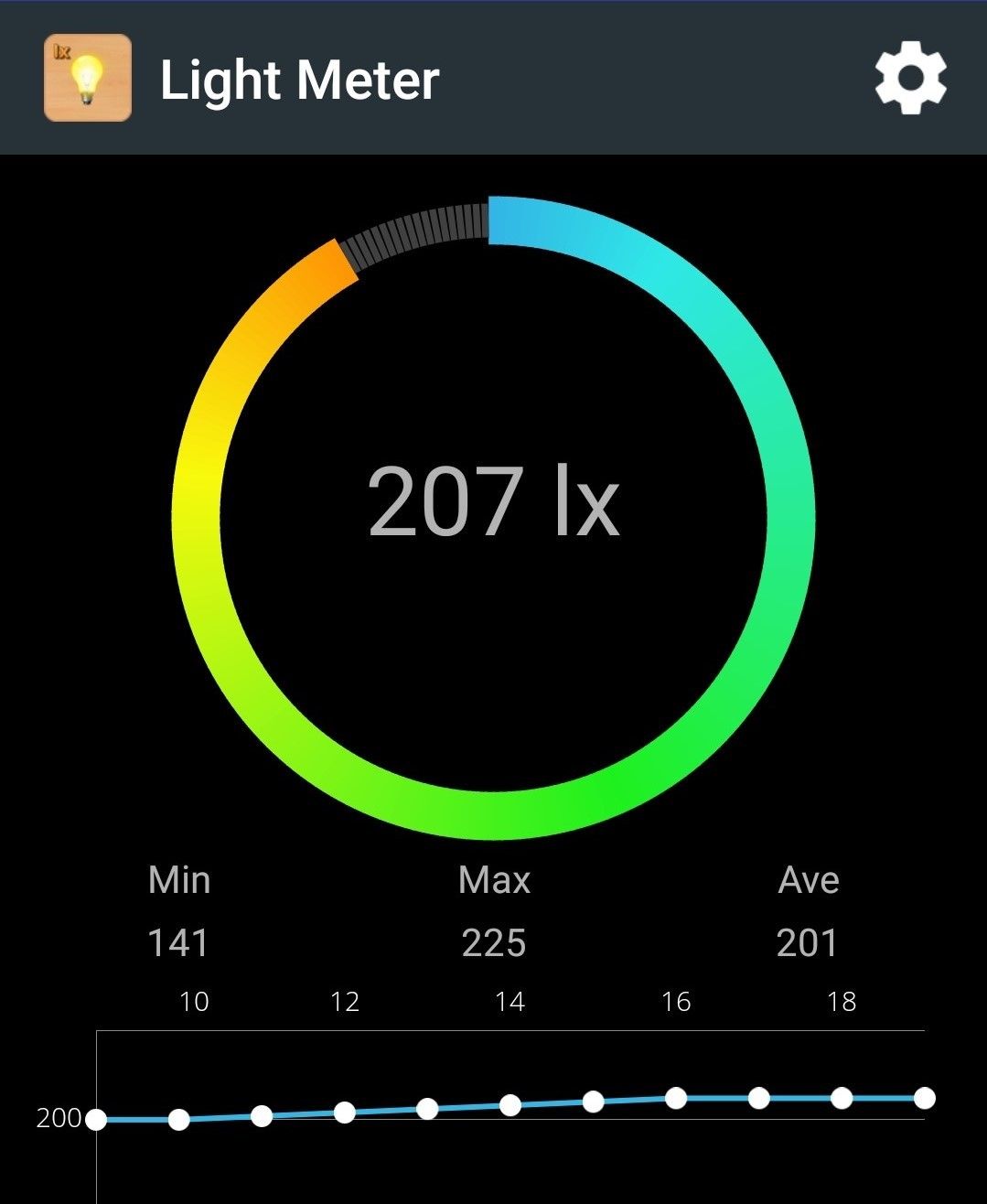
请查阅我们的 datasheets ,以根据场景的照度测量结果检查预期的噪声水平。
如何防止环境光造成影响?
处理环境光的最佳方法是消除它。因此,请关闭Zivid相机附近所有不必要的光源。如果很难或不可能移除光源,请通过在场景周围放置挡光板来防止它照射场景。您不需要使用金属遮挡物,深色的窗帘就足够了。
How to mitigate the effect of ambient light?
In cases where it is not reasonable to prevent an external light source from illuminating the scene, follow the guidelines below to minimize its effect.
- 选择合适的相机
Zivid 2+比Zivid 2和One+对环境光更稳健,因为投影仪强度提高了40%。
- 一般建议
- 采集设置
- Projector Brightness(投影仪亮度)
通过将投影仪亮度设置提高到最大值来增加信号强度。这会增加SNR。
- Gain(增益)
通过将增益设置到最小值 (1.0) 来最小化噪声影响。增益会将噪声与信号一起放大,这不是希望在此场景中发生的情况。
- Aperture/f-number
配置光圈/f值设置,同时注意 depth of focus。
- Exposure Time(曝光时间)
通过增加曝光时间来补偿增益和光圈参数值的降低。
- Sampling::Pixel
Monochrome Capture improves ambient light resiliency due to narrow band; therefore, set
Sampling::PixeltoblueSubsample2x2.
如果您不知道如何手动配置设置,请通过以下教程学习 调整合适的曝光以获取好的点云。或者从使用 Assisted Mode(辅助模式) 开始,然后根据上述建议和 曝光stops列表 微调采集设置。
- 过滤器
- Noise Filter(噪声过滤器)
Fine-tune the Noise Removal threshold to the needs of your application. You can use high values to preserve only the high-confidence points. Enable the Noise Suppression filter to suppress the noise from ambient light, but be aware of smoothing effects. If you can’t get enough points, enable the Noise Repair filter. If that is not enough, you can set the Noise Removal threshold low to allow more points. This is necessary when the noise in the point cloud from ambient light is significant.
- Gaussian Smoothing(高斯平滑)
如果您的应用不需要高精度的点而只需要光滑的表面,请使用高斯滤波过滤器来抑制噪声并将点与网格对齐。
- Hole Filling Filter(空洞填充过滤器)
If you have small regions of missing points due to ambient light, you can use the Hole Filling filter to fill in the points.
- HDR
以相似或相同的曝光进行HDR采集以改善SNR。阅读更多有 关 平均技术 的信息。
- 物理设置
将相机移动至距离场景更近位置。 投影仪的发光功率是有限的, 而场景的光照度取决于投影仪离场景的距离。 距离越近,信号越强,而来自环境光的噪声保持不变。
超越
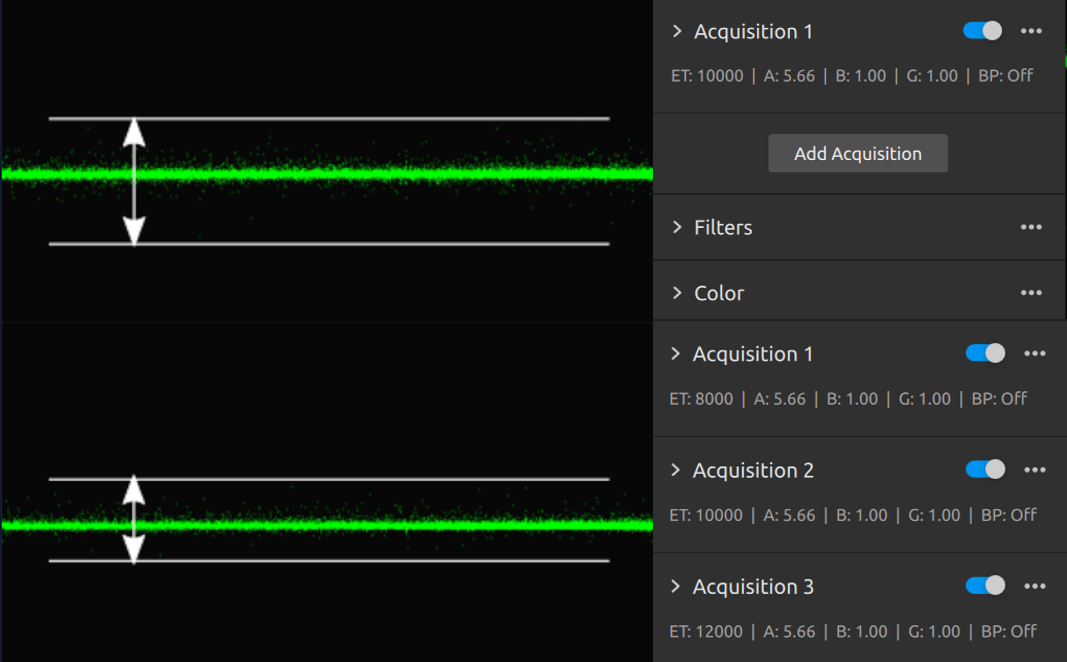
To show how you can use a 2D image to reveal how and to what extent the ambient light affects the scene, we will demonstrate an experiment.

在镜头前,我们放置了一部打开了手电筒的智能手机。然后,我们在投影仪打开的情况下拍摄图像并将其设置为最大(Zivid 2+ 的亮度 = 2.5;Zivid 2 和 Zivid One+ 的亮度 = 1.8)。我们相应地配置了剩余的曝光设置,以获得高强度图像,同时尽可能避免过饱和。生成的图像显示手电筒似乎是场景中除投影仪之外的唯一光源。 我们在相机前方放置了一个打开了手电筒功能的智能手机。 然后,我们将投影仪亮度设置为最大值(Zivid 2+ 亮度 = 2.5;Zivid 2 和 Zivid One+ 亮度 = 1.8),在其开启的情况下拍摄图像。我们同时对其余的曝光设置参数进行了相应的调整,以获取高强度的图像,同时尽可能避免过饱和。 生成的图像显示手电筒似乎是场景中除投影仪之外的唯一光源。
然后,我们捕获了同一场景的另一幅图像,但是这次关闭了投影仪(亮度=0)。为了补偿损失的曝光,我们将增益设置为最大值(16.0)。如果向下滚动查看当前的图像,您将看到该图像中有另一个光源! 此光源主要影响图像的右下角,并向中心扩散。

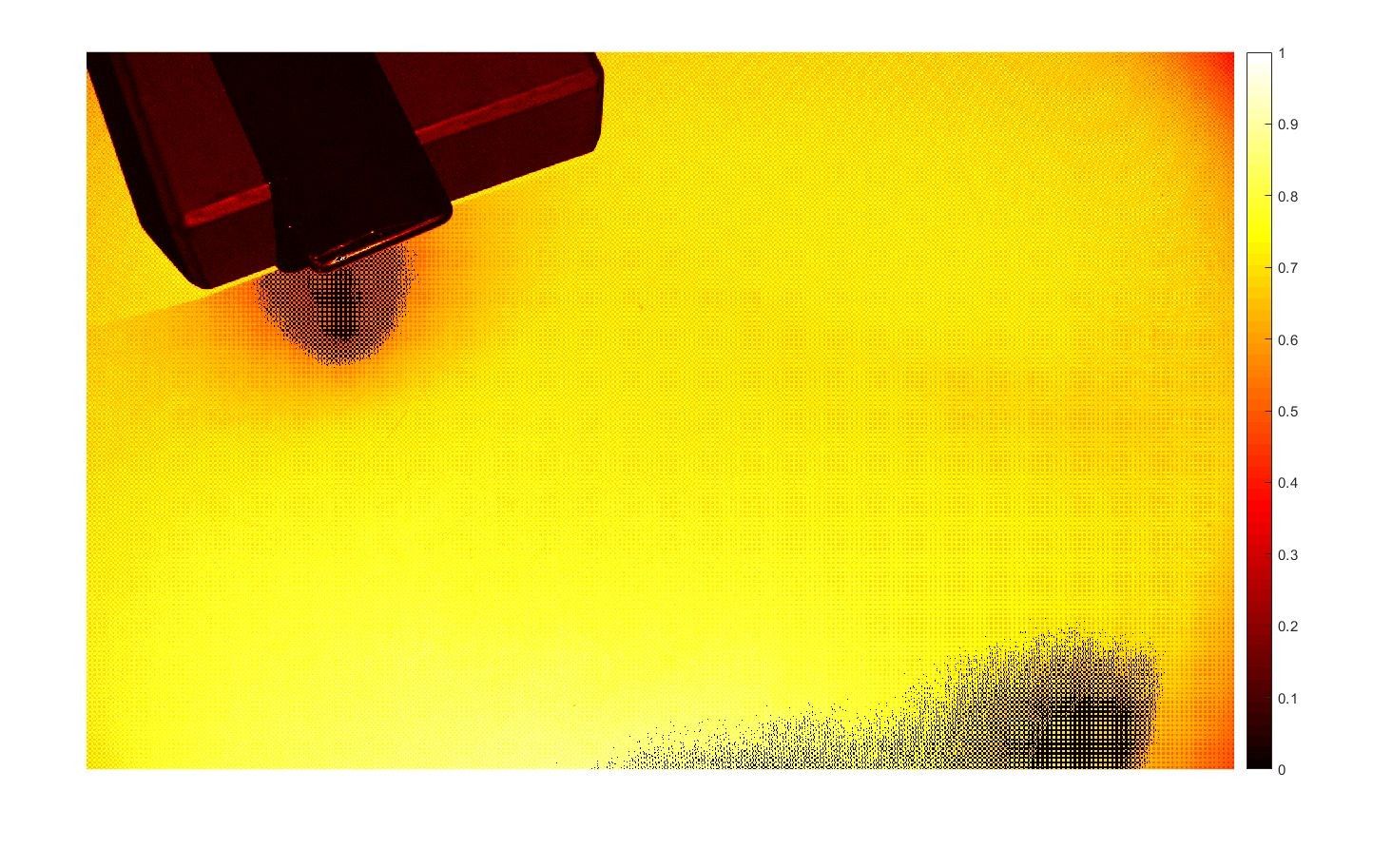
该实验展示了如何使用2D图像作为查看环境光和测量其对场景的影响的一件工具。 如何使用这些信息取决于您自己。
您还可以分析 SNR图像 以获取有关环境光及其对场景影响的更多信息。下图是归一化 (0-1) SNR 图像。在图像中环境光影响较大的区域,SNR 较低。但是,这也取决于材料的光学特性,这就是它在深色智能手机上的数值更低的原因。
进一步阅读
继续查看下一个主题: 拆垛 - 远距离成像。