现场标定
现场标定是一个维护工具,可用于验证和校正Zivid相机的尺寸准确度。用户可以检查视场 (FOV) 中不同区域的点云的尺寸准确度,并确定验证结果是否符合您的应用要求。如果发现验证结果对于应用来说不够准确,则可以执行校正以增加点云的尺寸准确度。多次测量的平均尺寸准确度误差的预期值接近于零 (<0.1%)。
为什么这是必要的?
Zivid相机被设计为能够在工业环境中工作并持续输出高质量点云,但像大多数高精密电子仪器一样,有时可能需要稍作调整以确保它们保持最佳性能。 当相机的工作环境发生重大变化或进行了繁重的操作时,可能需要进行校正以使其在新的设置下达到最佳的工作效果。
所需的设备
执行现场标定需要以下工具:
-
如果在Linux上运行,请安装工具deb软件包。
已包含在Windows安装里。
带有基准标记的官方 Zivid calibration board 。
Zivid标定板
备注
从 Zivid SDK 2.2 开始支持。
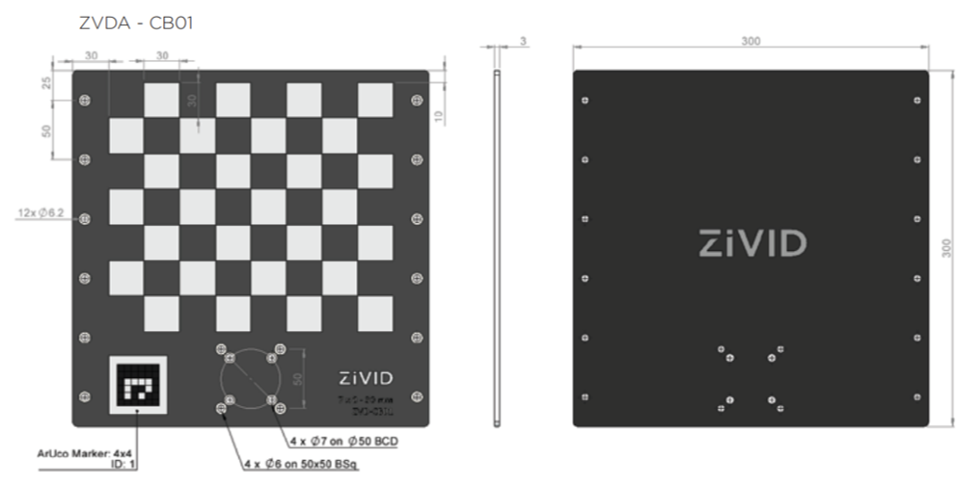
Zivid 标定板 ZVDA-CB01 是一块尺寸为 300 mm x 300 mm、厚度为 3 mm 的铝板,重 460 g。基准标记用于标识该标定板的型号,其上印有 8×7 网格排列的 30 mm x 30 mm 棋盘格图案。标定板表面为白色丝印。这些标定板均已通过 Zivid 的认证和单独验证,已知其误差小于 0.05%。
底部中心的孔以及侧面的孔均可用于安装。Zivid 标定板 ZVDA-CB01 符合 ISO 9409-1-50-4-M6 标准,该标准是机器人末端执行器机械接口的标准。因此,可以使用 M6 螺钉将标定板直接安装到机器人末端执行器上。
备注
从 Zivid SDK 2.16 开始支持。
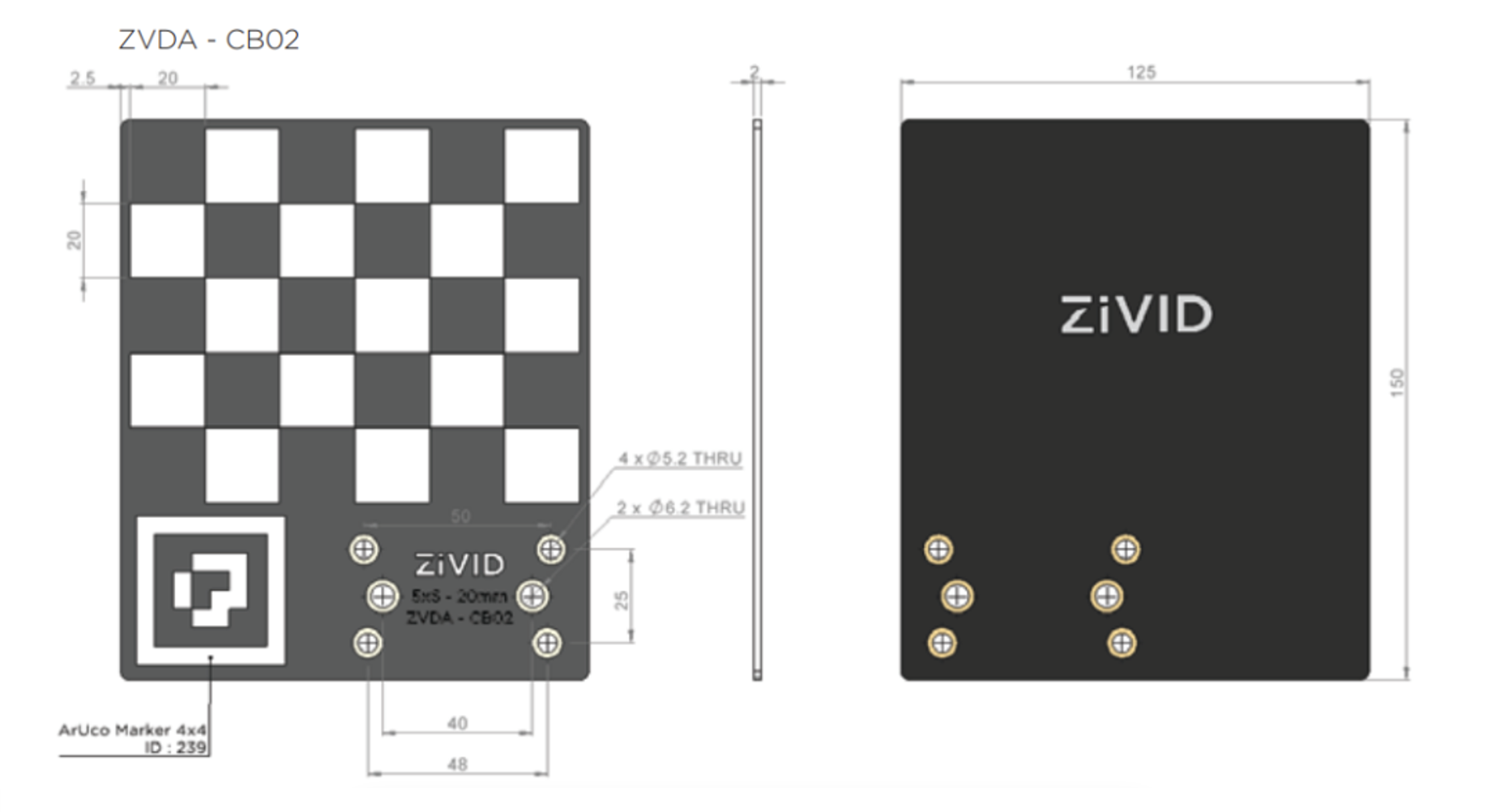
Zivid 标定板 ZVDA-CB02 为一块 150 mm x 125 mm、厚 2 mm 的铝板,重 96 克。基准标记用于标识该标定板的型号,其上印有 6x5 网格排列的 20 mm x 20 mm 棋盘格图案。标定板表面为白色丝印。这些标定板均已通过 Zivid 的认证和单独验证,已知其误差小于 0.05%。
右下角的孔均可用于安装。
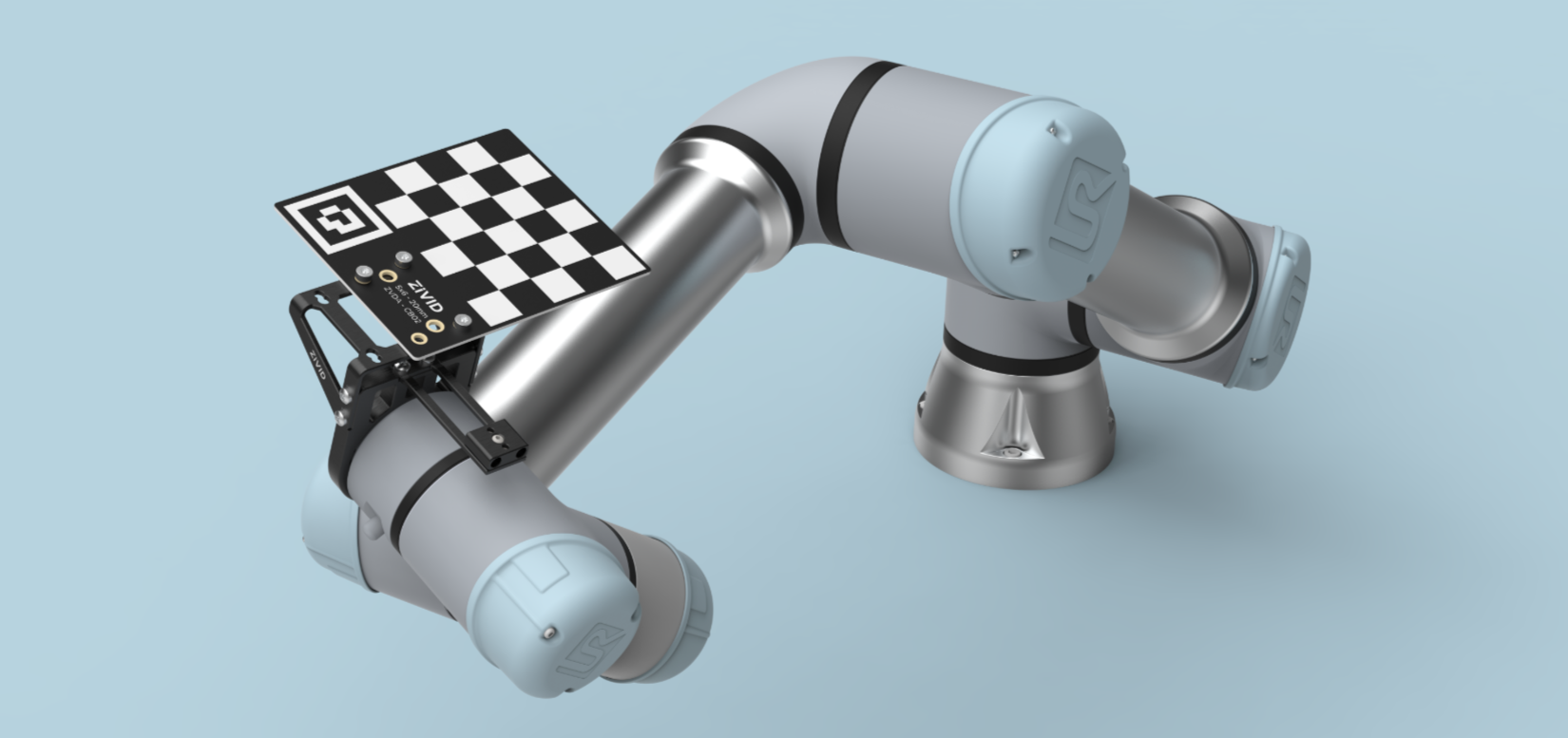
两种 Zivid 标定板均适用于 Zivid mounts 。对于手臂安装,我们建议使用 M5 螺钉将 Zivid 标定板安装在 Zivid On-Arm Mount 上。
如果标定板是固定安装的,我们建议使用 M5 螺钉将其安装在 Zivid Stationary Mount 上。使用 M6 螺钉和 T 型螺母,即可将我们的固定支架直接固定到铝型材上。您也可以使用 M6 螺钉和 T 型螺母将标定板直接安装到铝型材上。我们建议使用符合 DIN 912 / ISO 4762 标准的六角螺钉或符合 ISO 14579 标准的内六角螺钉(A2 或 A4 材质)固定标定板。使用兼容的平垫圈可防止螺钉头和螺母(如有需要)在表面留下旋转痕迹,两者均为不锈钢(A2 或 A4 材质)。
如需了解有关如何使用现场标定功能的更多信息,请查看以下页面:
通过阅读 预热,继续学习如何使用您的Zivid相机进行开发。
版本历史
SDK |
变更 |
|---|---|
2.17.0 |
现场标定功能更已从实验性功能中移出。 |
2.16.0 |
增加了对较小尺寸的标定板 ZVDA-CB02 (5x6 20 mm) 的支持。 |
2.9.0 |
在Zivid Studio中添加了现场标定功能。 |
2.6.0 |
添加了对标定板不同方向的检测的支持。改进了针对 光晕 - 点云中的亮点 问题下棋盘格检测的鲁棒性。改善了通过 |
2.3.0 |
改进了算法以在某些情况下产生更好的标定后精度。改善了标定API和现场标定中使用的棋盘格检测的鲁棒性。修复了在输入数据实际上足以满足计算标定时,仍会出现 "No significant correction could be identified (noise >> signal)."异常的问题。 |
2.2.0 |
添加了实验性的现场标定API和命令行工具 |