通过ArUco标记定义的ROI盒
本教程演示了如何使用ArUco标记定义 ROI 盒的参数以及如何使用它进行过滤。我们在这里使用了 Zivid calibration board 上的ArUco标记,假设标定板放置在料箱的右下角。 料箱大小也假定为已知,该数据用于设置ROI盒的尺寸。这样你就可以自动找到相机坐标系中的ROI参数了。
备注
本教程使用了一个档案相机(file camera)对下图中的场景进行演示。
首先,我们需要捕获ArUco标记的点云。

const auto fileCamera = std::string(ZIVID_SAMPLE_DATA_DIR) + "/BinWithCalibrationBoard.zfc";
std::cout << "Creating virtual camera using file: " << fileCamera << std::endl;
auto camera = zivid.createFileCamera(fileCamera);
Zivid::Settings2D settings2D{ Zivid::Settings2D::Acquisitions{ Zivid::Settings2D::Acquisition{} } };
Zivid::Settings settings{ Zivid::Settings::Acquisitions{ Zivid::Settings::Acquisition{} },
Zivid::Settings::Color{ settings2D } };
const auto originalFrame = camera.capture2D3D(settings);
auto pointCloud = originalFrame.pointCloud();
string fileCamera = Environment.GetFolderPath(Environment.SpecialFolder.CommonApplicationData) + "/Zivid/BinWithCalibrationBoard.zfc";
Console.WriteLine("Creating virtual camera using file: " + fileCamera);
var camera = zivid.CreateFileCamera(fileCamera);
var settings2D = new Zivid.NET.Settings2D
{
Acquisitions = { new Zivid.NET.Settings2D.Acquisition { } }
};
var settings = new Zivid.NET.Settings
{
Acquisitions = { new Zivid.NET.Settings.Acquisition { } }
};
settings.Color = settings2D;
using (var originalFrame = camera.Capture2D3D(settings))
{
var pointCloud = originalFrame.PointCloud;
file_camera = get_sample_data_path() / "BinWithCalibrationBoard.zfc"
print(f"Creating virtual camera using file: {file_camera}")
camera = app.create_file_camera(file_camera)
settings = zivid.Settings([zivid.Settings.Acquisition()])
settings.color = zivid.Settings2D(acquisitions=[zivid.Settings2D.Acquisition()])
original_frame = camera.capture_2d_3d(settings)
point_cloud = original_frame.point_cloud()
ArUco标记坐标系的原点位于ArUco标记的中心。
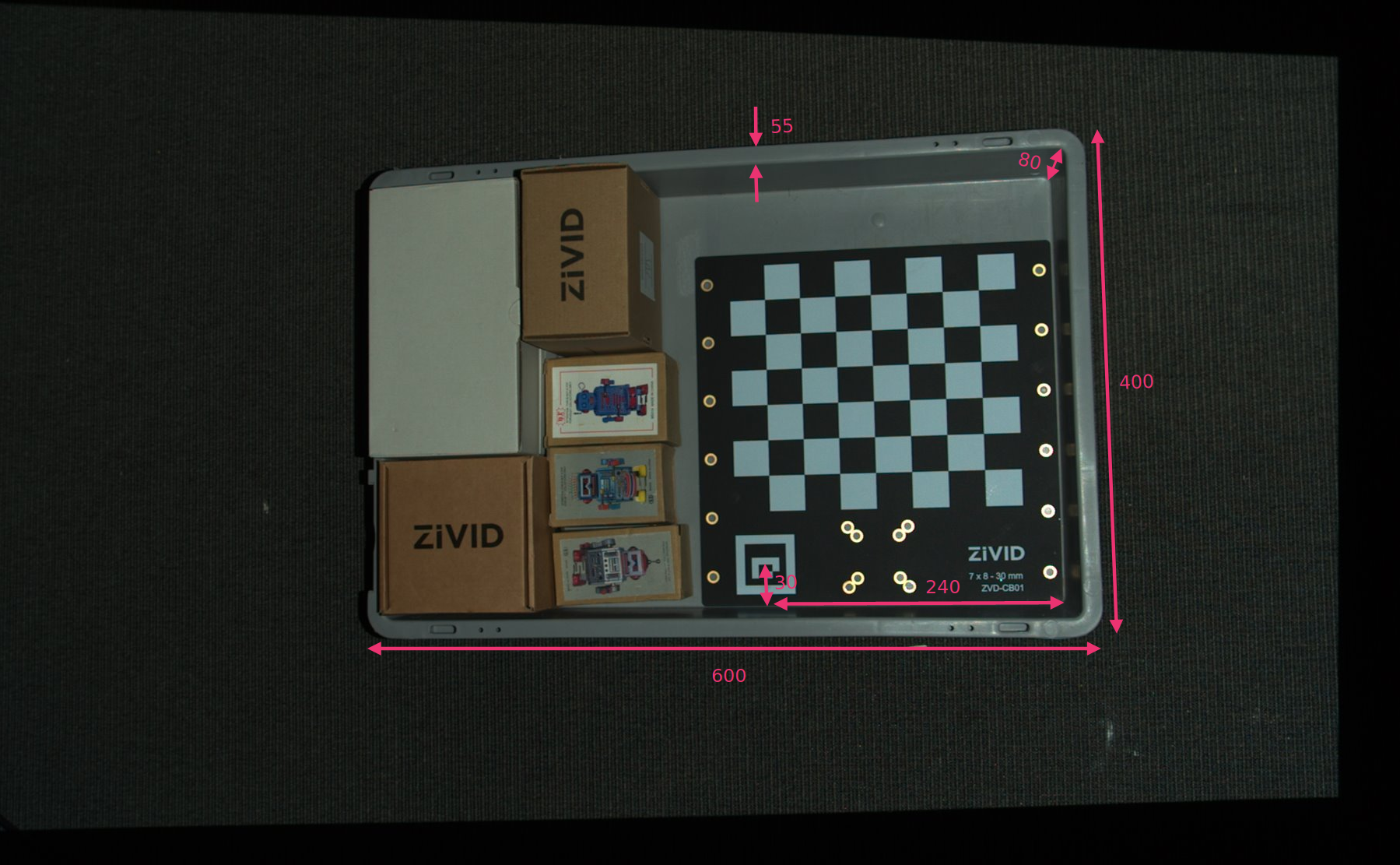
我们定义了ROI盒右下角相对于ArUco标记坐标系的位置,以及ROI盒尺寸。然后我们从长度和宽度中减去箱边缘的宽度以移除箱壁。
const float roiBoxLength = 545.F;
const float roiBoxWidth = 345.F;
const float roiBoxHeight = 150.F;
// Coordinates are relative to the ArUco marker origin which lies in the center of the ArUco marker.
// Positive x-axis is "East", y-axis is "South" and z-axis is "Down".
const Zivid::PointXYZ roiBoxLowerRightCornerInArUcoFrame{ 240.F, 30.F, 5.F };
const Zivid::PointXYZ roiBoxUpperRightCornerInArUcoFrame{ roiBoxLowerRightCornerInArUcoFrame.x,
roiBoxLowerRightCornerInArUcoFrame.y - roiBoxWidth,
roiBoxLowerRightCornerInArUcoFrame.z };
const Zivid::PointXYZ roiBoxLowerLeftCornerInArUcoFrame{ roiBoxLowerRightCornerInArUcoFrame.x - roiBoxLength,
roiBoxLowerRightCornerInArUcoFrame.y,
roiBoxLowerRightCornerInArUcoFrame.z };
float roiBoxLength = 545F;
float roiBoxWidth = 345F;
float roiBoxHeight = 150F;
// Coordinates are relative to the checkerboard origin which lies in the intersection between the four checkers
// in the top-left corner of the checkerboard: Positive x-axis is "East", y-axis is "South" and z-axis is "Down"
var roiBoxLowerRightCornerInCheckerboardFrame = new Zivid.NET.PointXYZ
{
x = 240F,
y = 30F,
z = 5F
};
var roiBoxUpperRightCornerInCheckerboardFrame = new Zivid.NET.PointXYZ
{
x = roiBoxLowerRightCornerInCheckerboardFrame.x,
y = roiBoxLowerRightCornerInCheckerboardFrame.y - roiBoxWidth,
z = roiBoxLowerRightCornerInCheckerboardFrame.z
};
var roiBoxLowerLeftCornerInCheckerboardFrame = new Zivid.NET.PointXYZ
{
x = roiBoxLowerRightCornerInCheckerboardFrame.x - roiBoxLength,
y = roiBoxLowerRightCornerInCheckerboardFrame.y,
z = roiBoxLowerRightCornerInCheckerboardFrame.z
};
roi_box_length = 545
roi_box_width = 345
roi_box_height = 150
roi_box_lower_right_corner_in_aruco_frame = np.array([240, 30, 5])
roi_box_upper_right_corner_in_aruco_frame = np.array(
[
roi_box_lower_right_corner_in_aruco_frame[0],
roi_box_lower_right_corner_in_aruco_frame[1] - roi_box_width,
roi_box_lower_right_corner_in_aruco_frame[2],
]
)
roi_box_lower_left_corner_in_aruco_frame = np.array(
[
roi_box_lower_right_corner_in_aruco_frame[0] - roi_box_length,
roi_box_lower_right_corner_in_aruco_frame[1],
roi_box_lower_right_corner_in_aruco_frame[2],
]
)
然后可以设置定义ROI盒基坐标系的三个点。
const Zivid::PointXYZ pointOInArUcoFrame = roiBoxLowerRightCornerInArUcoFrame;
const Zivid::PointXYZ pointAInArUcoFrame = roiBoxUpperRightCornerInArUcoFrame;
const Zivid::PointXYZ pointBInArUcoFrame = roiBoxLowerLeftCornerInArUcoFrame;
var pointOInCheckerboardFrame = roiBoxLowerRightCornerInCheckerboardFrame;
var pointAInCheckerboardFrame = roiBoxUpperRightCornerInCheckerboardFrame;
var pointBInCheckerboardFrame = roiBoxLowerLeftCornerInCheckerboardFrame;
然后我们将配置ArUco标记。
std::cout << "Configuring ArUco marker" << std::endl;
const auto markerDictionary = Zivid::Calibration::MarkerDictionary::aruco4x4_50;
std::vector<int> markerId = { 1 };
Console.WriteLine("Configuring ArUco marker");
var markerDictionary = Zivid.NET.MarkerDictionary.Aruco4x4_50;
var markerId = new List<int> { 1 };
然后我们检测 ArUco 标记。
std::cout << "Detecting ArUco marker" << std::endl;
const auto detectionResult = Zivid::Calibration::detectMarkers(originalFrame, markerId, markerDictionary);
Console.WriteLine("Detecting ArUco marker");
var detectionResult = Detector.DetectMarkers(originalFrame, markerId, markerDictionary);
然后我们需要估计ArUco标记的位姿,将这三个点转换到相机参考系。
std::cout << "Estimating pose of detected ArUco marker" << std::endl;
const auto cameraToMarkerTransform = detectionResult.detectedMarkers()[0].pose().toMatrix();
std::cout << "Transforming the ROI base frame points to the camera frame" << std::endl;
const auto roiPointsInCameraFrame = transformPoints(
std::vector<Zivid::PointXYZ>{ pointOInArUcoFrame, pointAInArUcoFrame, pointBInArUcoFrame },
cameraToMarkerTransform);
Console.WriteLine("Estimating pose of detected ArUco marker");
var cameraToMarkerTransform = new Zivid.NET.Matrix4x4(detectionResult.DetectedMarkers()[0].Pose().ToMatrix());
Console.WriteLine("Transforming the ROI base frame points to the camera frame");
var roiPointsInCameraFrame = TransformPoints(
new List<Zivid.NET.PointXYZ> { pointOInCheckerboardFrame, pointAInCheckerboardFrame, pointBInCheckerboardFrame },
cameraToMarkerTransform);
print("Estimating pose of detected ArUco marker")
camera_to_marker_transform = detection_result.detected_markers()[0].pose.to_matrix()
print("Transforming the ROI base frame points to the camera frame")
roi_points_in_camera_frame = _transform_points(
[point_o_in_aruco_frame, point_a_in_aruco_frame, point_b_in_aruco_frame],
camera_to_marker_transform,
)
提示
详细了解 位置、方向和坐标变换 来了解其工作原理。
现在我们可以根据ROI盒的大小和位置过滤点云。将第一个范围(extent)设置为一个较小的负数值来避免过滤掉底板,第二个范围(extent)设置为所需的盒子高度。
settings.set(
Zivid::Settings::RegionOfInterest{
Zivid::Settings::RegionOfInterest::Box::Enabled::yes,
Zivid::Settings::RegionOfInterest::Box::PointO{ roiPointsInCameraFrame[0] },
Zivid::Settings::RegionOfInterest::Box::PointA{ roiPointsInCameraFrame[1] },
Zivid::Settings::RegionOfInterest::Box::PointB{ roiPointsInCameraFrame[2] },
Zivid::Settings::RegionOfInterest::Box::Extents{ -10, roiBoxHeight } });
settings.RegionOfInterest.Box.Enabled = true;
settings.RegionOfInterest.Box.PointO = roiPointsInCameraFrame[0];
settings.RegionOfInterest.Box.PointA = roiPointsInCameraFrame[1];
settings.RegionOfInterest.Box.PointB = roiPointsInCameraFrame[2];
settings.RegionOfInterest.Box.Extents = new Zivid.NET.Range<double>(-10, roiBoxHeight);
settings.region_of_interest.box.enabled = True
settings.region_of_interest.box.point_o = roi_points_in_camera_frame[0]
settings.region_of_interest.box.point_a = roi_points_in_camera_frame[1]
settings.region_of_interest.box.point_b = roi_points_in_camera_frame[2]
settings.region_of_interest.box.extents = (-10, roi_box_height)
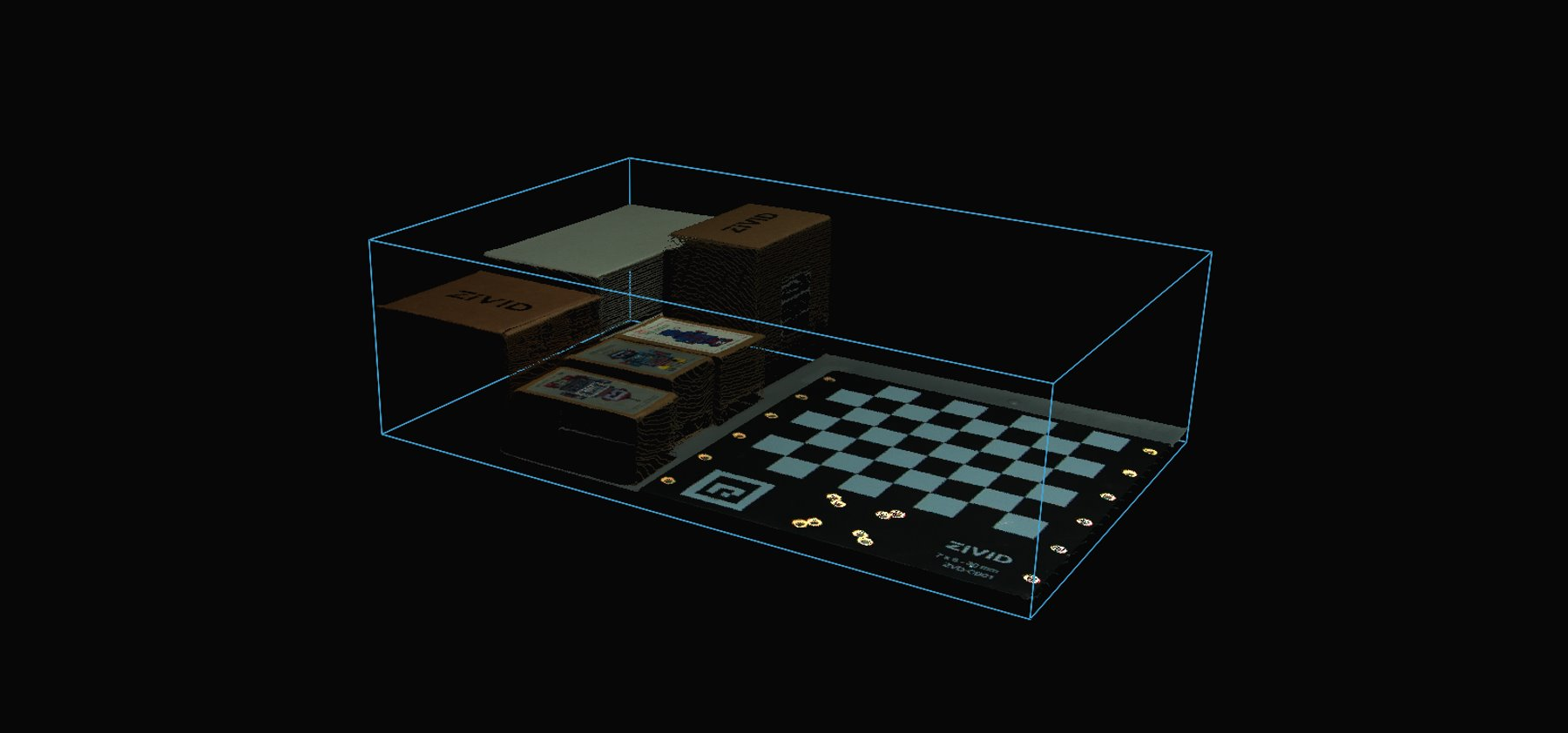
最后,我们进行新的捕获并可视化过滤后的点云。
const auto roiFrame = camera.capture2D3D(settings);
std::cout << "Displaying the ROI-filtered point cloud" << std::endl;
visualizeZividPointCloud(roiFrame);
using (var roiFrame = camera.Capture2D3D(settings))
{
Console.WriteLine("Displaying the ROI-filtered point cloud");
VisualizeZividPointCloud(roiFrame);
}
如需根据ROI盒过滤点云,您可以运行我们的代码示例。
./ROIBoxViaArucoMarker
./ROIBoxViaArucoMarker
示例: roi_box_via_aruco_marker.py
python roi_box_via_aruco_marker.py
小技巧
如果您希望在自己的设置中使用它,您可以自行修改代码示例:
用您的实际相机和设置替换档案相机。
将标定板放在料箱的右下角。
将ROI盒尺寸修改为您的料箱的尺寸。
运行示例!
您现在可以保存包含了ROI参数的捕获设置了,然后拿走标定板并在整个料箱上使用该设置。