ロボットへの取り付け
Zividの全3Dカメラはロボットへの取り付けが可能です。中でもZivid 2/Zivid 2+は、コンパクト・軽量・高速撮像に加え、用途に特化した視野により、ロボットアームへの取り付けに特に適しています。
Zivid オンアームマウント
Zivid On-Arm Mount は、Zividカメラを産業用ロボットおよび協働ロボットに取り付けるためのマウントです。
Zivid オンアームマウントを選ぶ理由
軽量
Zivid オンアームマウントは軽量設計で、ロボットアームの可搬重量への影響を小さく抑えます。これは協働ロボットや小型産業用ロボットで特に重要です。結果として、より重いツールやグリッパーの使用、システムのペイロード最大化に貢献します。
モジュール性
1つのカメラブラケットで全モデルに対応し、完全な分解を行わずにカメラ交換が可能です。
ケーブルマネジメントの統合
Zivid オンアームマウントはカメラ側にストレインリリーフを備え、ケーブルの絡み発生時にもコネクタを保護します。カメラ背面または左右いずれにも取り付け可能で、設置シナリオに柔軟に適応します。
オクルージョンの抑制
2種類のカメラブラケット(フラット/15°傾斜)により、カメラ視界を遮る大型グリッパー使用時でも適切な取り付けが可能です。
柔軟性と干渉回避
薄型設計により、他物体との干渉リスクを低減し、グリッパーやロボットアームのクリアランスを確保します。エクステンダーの追加と柔軟な構成により複数の取り付け姿勢が選べ、カメラブラケットは2方向の取り付けが可能です。これにより大型グリッパーを避け、複雑な軌道でもヘッドルームを確保して自己干渉を防止できます。傾斜ブラケットを後方向きに取り付けるとグリッパー側をより見やすくなり、必要なロボット動作を減らせる場合があります。
適応性
Zivid オンアーム マウントには複数のバリエーションがあるため、さまざまなロボットをサポートします。さらに、モジュラー設計により、より多くのロボットに適合するようにアダプターを簡単にカスタマイズできます。


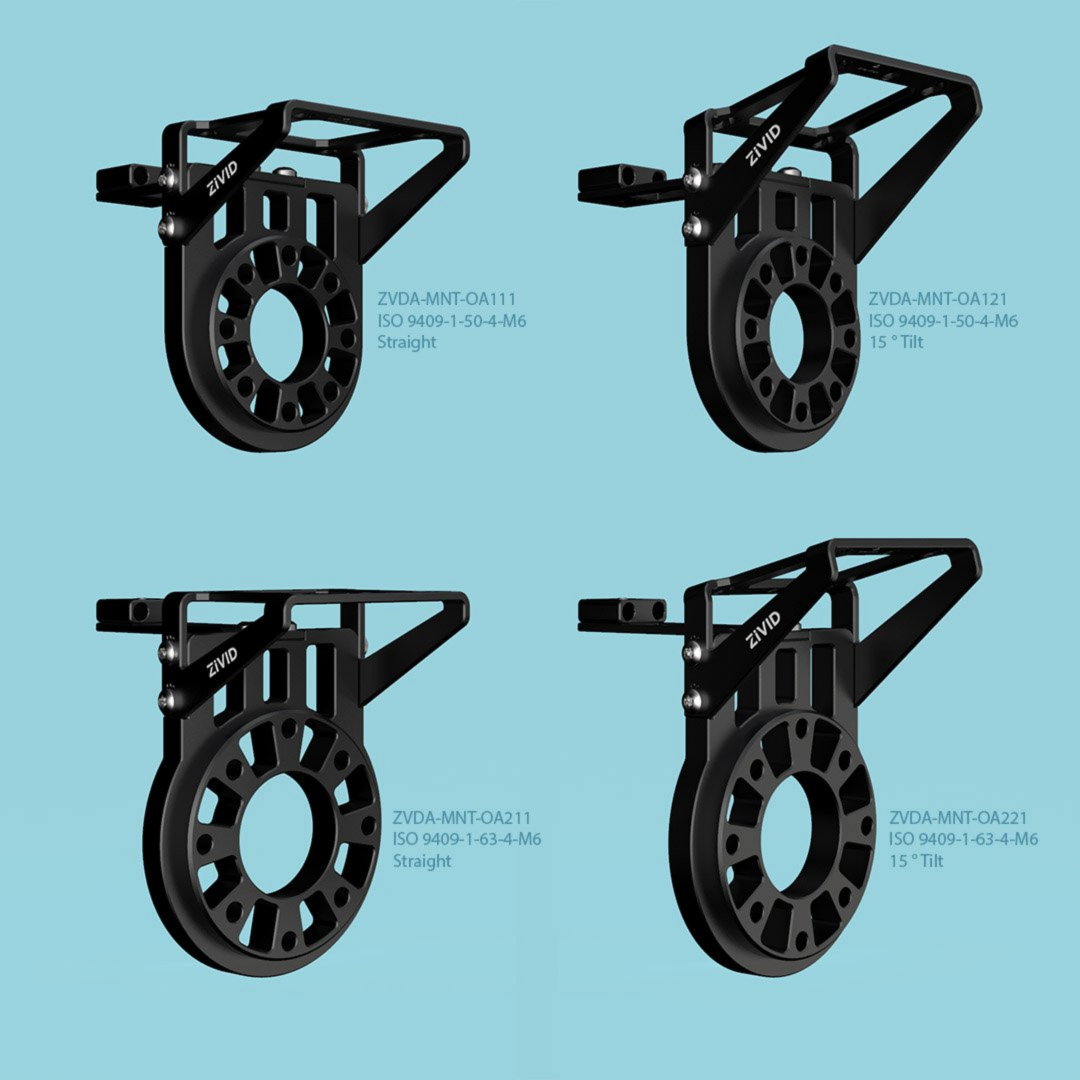
Zivid オンアーム マウントのバリエーション
Zivid オンアーム マウントには4つのバリエーションがあります。
- ZVDA-MNT-OA111
ストレートカメラブラケット
ISO 9409-1-50-4-M6(UR、Omron、Doosan など)に対応したフランジアダプター
- ZVDA-MNT-OA121
カメラ ブラケットの 15 度の傾斜 (オクルージョンを引き起こす可能性のあるグリッパーを使用する場合に推奨)
ISO 9409-1-50-4-M6(UR、Omron、Doosan など)に対応したフランジアダプター。
- ZVDA-MNT-OA211
ストレートカメラブラケット
ISO 9409-1-63-4-M6(安川電機、川崎重工 など)に対応したフランジアダプター
- ZVDA-MNT-OA221
カメラ ブラケットの 15 度の傾斜 (オクルージョンを引き起こす可能性のあるグリッパーを使用する場合に推奨)
ISO 9409-1-63-4-M6(安川電機、川崎重工 など)に対応したフランジアダプター
PDFのデータシート/ユーザーガイドおよびCADファイルは Accessories Downloads に掲載しています。
Zivid オンアームマウント エクステンダー
Zivid On-Arm Mount Extender は取り付けの柔軟性を高める別売(オプション)製品です。
Zivid オンアーム マウント エクステンダーのバリエーション
エクステンダーには 2 つのバリエーションがあります。
- ZVDA-MNT-OA01E
ISO9409-1-50-4-M6フランジ(UR、Omron、Doosan など)に対応
- ZVDA-MNT-OA02E
ISO9409-1-63-4-M6フランジ(安川電機、川崎重工 など)に対応
データシートは Accessories Downloads に掲載しています。
取り付け手順
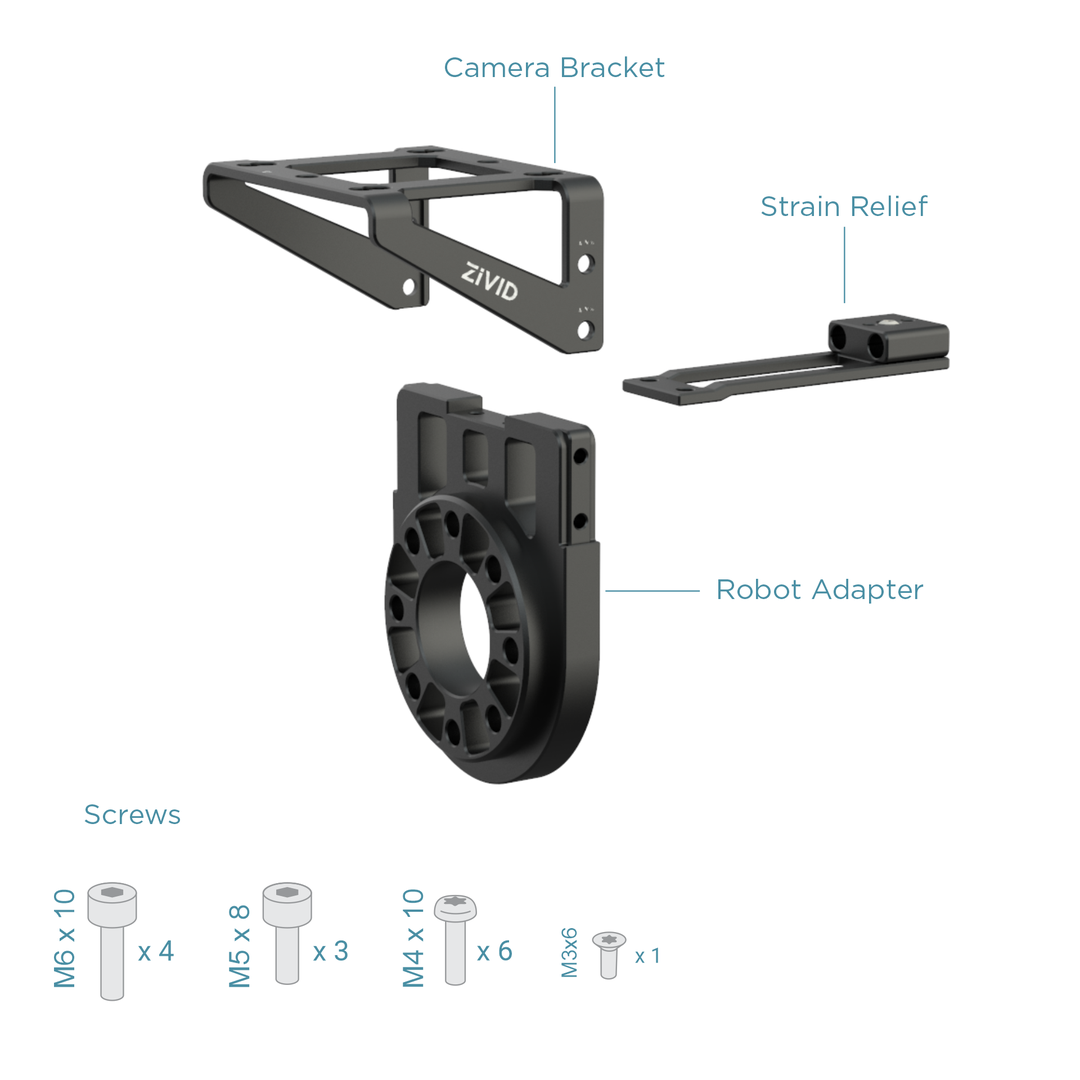
同梱物にはカメラブラケット、ケーブル管理用ストレインリリーフ、ロボット用フランジアダプター、取り付け用ねじが含まれます。
設置には以下の工具が必要です。
トルクス T20/T25/T30

ロボットアダプターとエクステンダー
オプションのエクステンダーはロボットアダプターの後ろまたは前に取り付けることができます。カメラをグリッパーから遠ざけるために前に設置すると、ピッキング中にビンの端などに衝突するリスクが最小限に抑えられます。ロボット アダプターの後ろにエクステンダーを取り付けることは、一部のロボットでのロボットの自己衝突のリスクを軽減するのに適しており、優れたケーブル管理オプションも提供します。
どのマウント部品をロボットフランジに固定する場合でも、4本のねじで取り付ける前に、ロボットの資料で推奨ねじ種とトルク値を確認してください。ねじはステンレス(A2またはA4)を推奨します。エクステンダーにはステンレス製の取付ねじが付属しますが、オンアームマウントには付属しません。
ねじがロボットフランジにどの程度入るべきか、ロボットの資料で確認してください。ロボットアダプター分としてねじ長に12.5 mmが加わります。ねじの食い込み深さは概ね5 mmが適切です。
柔軟性向上のためにエクステンダーを追加できますが、ロボットの可搬重量に留意し、偏心ペイロードによる慣性力を過小評価しないでください。
位置決めダウエルピン
オンアームマウントをロボットフランジに固定する際は、h公差のダウエルピンの使用を推奨します。
警告
m公差の位置決めピンは使用しないでください。固着するおそれがあります。
エクステンダーをロボットアダプターの後方に取り付ける場合、ロボットフランジとの接続にはØ6 mmのダウエルピンを使用してください。ダウエルピンのエクステンダーへの挿入深さは6 mmです。ロボットの資料でフランジ側の挿入深さを確認し、長さ10 mm程度のダウエルピンが一般的に適します。
エクステンダーをロボットアダプターの前方に取り付ける場合、貫通させる必要があるため位置決めダウエルピンの長さは20〜22 cmが必要です。
エクステンダーを使用しない場合、ダウエルピンのロボットアダプターへの挿入深さは5 mmとしてください。
Tip
ロッキングダウエルピンは再組立時の再現性を高め、相当な外力に晒された場合でも隣接部品の長期的なズレを防ぎます。
ストレインリリーフ
ストレインリリーフは下図のとおり取り付けてください。
注釈
ケーブルクランプをグリッパー側に向けた前向きの取り付けも可能です。
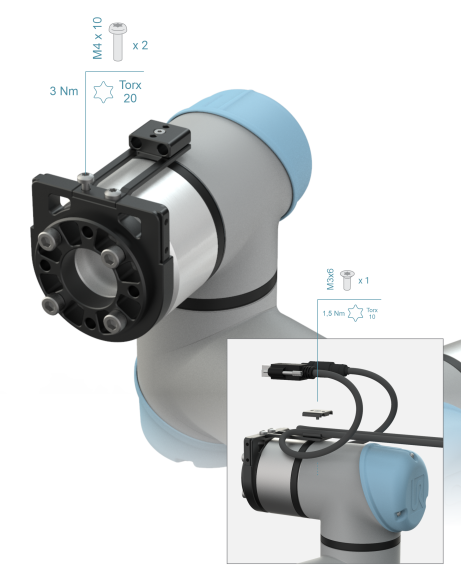
Tip
ストレインリリーフは、ケーブルが絡んだ際にコネクタへ直接力が加わるリスクを低減し、物理的損傷を防ぎます。絡みによる不要な力をロボットアーム側へ逃がすことで、動作停止の猶予も生まれます。併せて Igus Cable Management Solutions など適切なケーブル管理も導入してください。
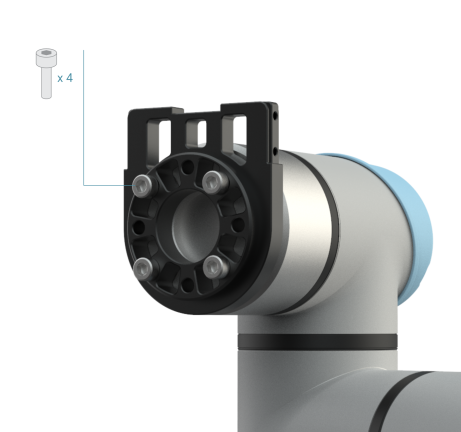
カメラブラケット
カメラブラケットを取り付けます。

注釈
カメラ取付ブラケットは左右対称のため、後方(カメラブラケットの矢印を後ろに向けた状態)での取付も可能です。これにより、グリッパーとカメラの間により多くのスペースが残ります。
カメラブラケットをロボットアダプターのレール上にスライドさせて、カメラを取り付けます。

Tip
ネジの緩みを防ぐ安全性を高めるために、ロックタイト (紫または青) とノルトロック ワッシャーの使用をお勧めします。通常の平ワッシャーは振動の防止には役立ちませんが、特定のコンポーネントに入るネジの正しい深さを確保するのに役立ちます。
ケーブル
ケーブルを取り付け、ストレインリリーフに通してください。ケーブルクランプは直径5〜7 mmのケーブルに対応します。

注釈
Zivid オンアームマウントのストレインリリーフはZivid純正の電源およびデータケーブル向けに設計されています。より太い他社製やカスタムケーブルも使用可能ですが、その場合はケーブルクランプではなく結束バンドでストレインリリーフに固定してください。
警告
Zivid純正以外のケーブルの使用は推奨していません。
カメラ〜ストレインリリーフ間のケーブルは、コネクタへ静的な曲げ・ねじりが継続的にかかるのを避けるため、適度な余裕を持たせてください。Zivid オンアームマウント使用時は、両者間に20〜30 cmの余長を推奨します。カメラから出るケーブルは、ストレインリリーフに入る前に小さなループを作るのが望ましいです。
別案として、Zivid Mount Extender側面の開口部からケーブルを配線する方法もあります。その場合はカメラ〜ストレインリリーフ間の余長を30〜40 cmとしてください。
Tip
90度角のコネクタを備えた Power and Ethernet cables はZivid オンアームマウントとの相性が良好です。下向きに配線でき省スペースなため、ストレートよりも絡みのリスクが低く安全です。
注釈
Zivid オンアームマウントのストレインリリーフは、前後いずれの向きで取り付けたフラット/傾斜ブラケットでも使用可能です。ただし後方向きではケーブルクランプのねじにアクセスできません。代替として、ストレインリリーフをオンアームマウント側面に取り付ける方法もあります。
PC側でもコネクタ/ポート損傷防止のため、何らかのストレインリリーフ対策を施すことを推奨します。
さらなる衝突対策については Protective Housing を参照してください。
ロボット取り付け用アクセサリ/機器の購買・設計・統合・設置に関する適切な判断のため、 ロボットの取り付けに関する機械的考慮事項 を参照してください。
三脚への取り付け について引き続きお読みください。