How to Run a HALCON Sample
Introduction
이 자습서에서는 HALCON 샘플을 구성하고 HDevelop, C++ 및 C#에서 실행하는 방법을 보여줍니다.
Requirements
Required
zivid-halcon-samples (HDevelop) / zivid-cpp-samples / zivid-csharp-samples
참고
Zivid 카메라로 테스트한 HALCON 버전은 19.05 Progress, 20.05 Progress, 21.11 Progress, 24.05 Progress, 24.11 Progress-Steady, 25.05 Progress 입니다.
Optional
현재 별도의 플라이 뷰어가 설치되어 있지 않다면 MeshLab 제공된 샘플에서 생성된 포인트 클라우드를 볼 수 있는 간단한 옵션입니다.
Instructions
단계별 지침은 아래 스크린샷과 함께 제공됩니다.
Configure environment variables for GenICam/HALCON
GenICam과 함께 Zivid를 사용하려면 먼저 일부 환경 변수를 설정해야 합니다. 두 가지 옵션이 있습니다.
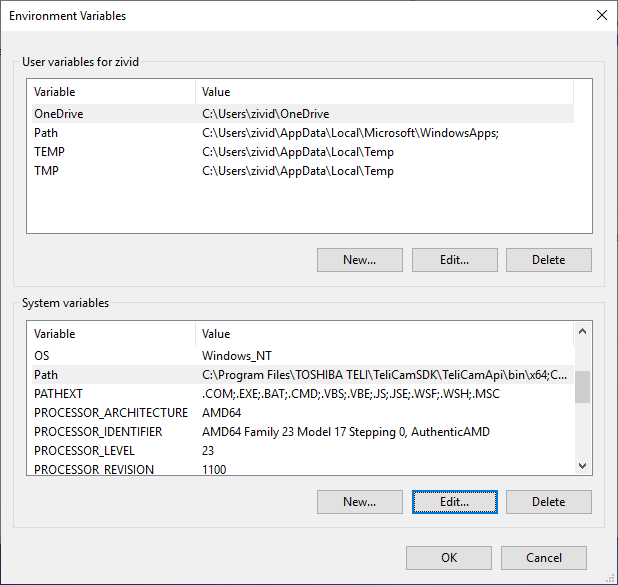
PC에서 System → Advanced System Settings → Environmental Variables 을 따라 이동합니다.

System variables 에서 Path 변수를 선택하고 Edit… 을 클릭합니다. (이 단계에서 New 를 클릭하지 마세요. Path 시스템 변수의 기존 값을 덮어쓰게 됩니다!) 그런 다음 New: 를 클릭하여 다음 값을 추가합니다.
Variable name |
|
Variable value |
|
참고
Zivid 설치 경로가 올바른지 확인하십시오.
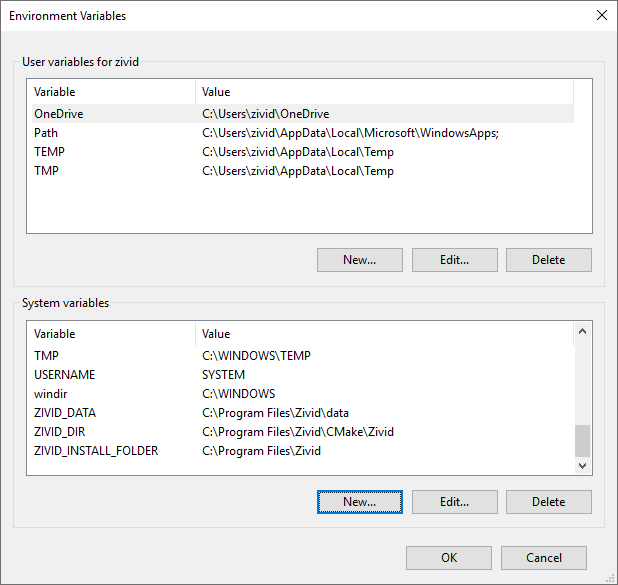
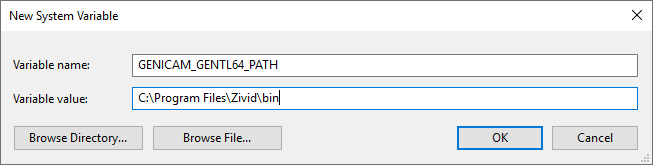
OK 를 클릭하고 환경 변수 창으로 돌아가서 New 를 클릭하여 다음 시스템 변수를 포함합니다.
Variable name: |
|
Variable value |
|
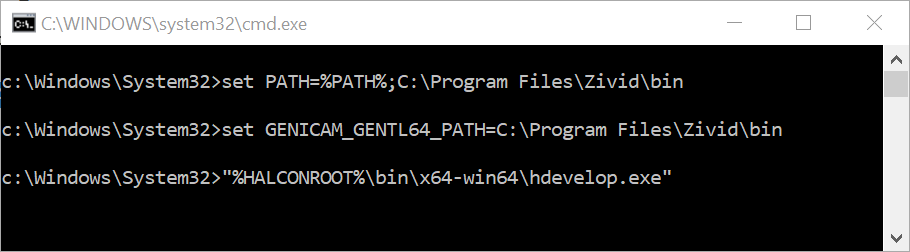
키보드에서 Win + R 키를 누릅니다. 그런 다음 cmd 를 입력하고 Enter 를 누릅니다.
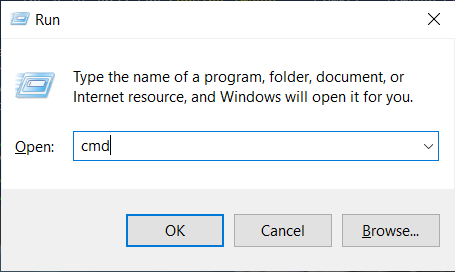
다음 명령을 입력합니다.
set PATH=%PATH%;C:\Program Files\Zivid\bin
set GENICAM_GENTL64_PATH=C:\Program Files\Zivid\bin
"%HALCONROOT%\bin\x64-win64\hdevelop.exe"
참고
HALCON 및 Zivid 설치에 대한 올바른 경로가 있는지 확인하십시오.
이제 환경 변수가 설정되었으므로 샘플을 실행할 준비가 되었습니다. 언어를 선택하세요:
아래 영상은 HALCON에서 Zivid 카메라를 사용하여 샘플을 실행하는 방법을 보여줍니다.
HDevelop를 열고 Open Program 를 클릭하세요. 샘플을 다운로드/복제한 위치로 이동하세요.
실행하려는 샘플을 엽니다. 예: CaptureHDR.hdev
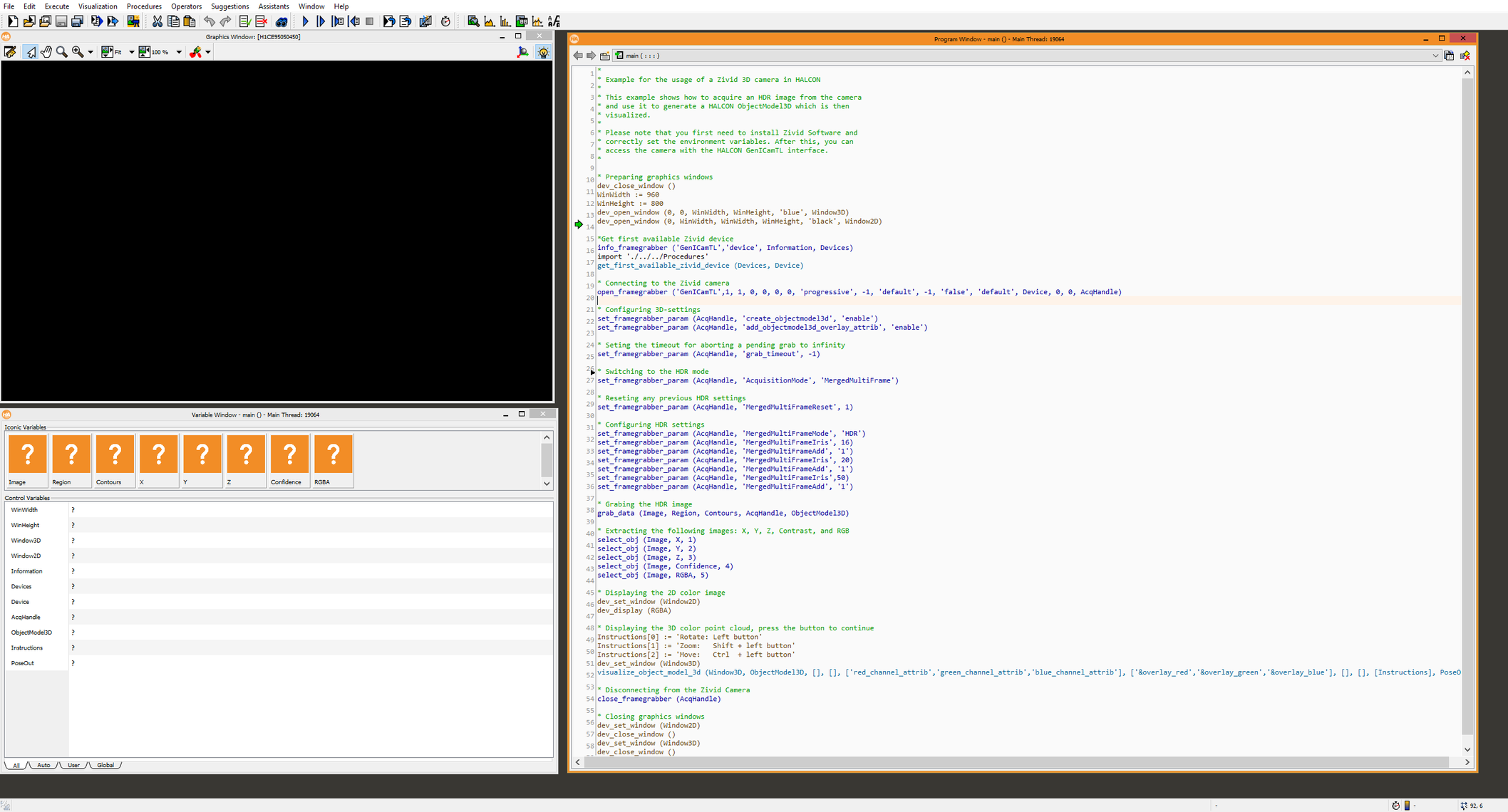
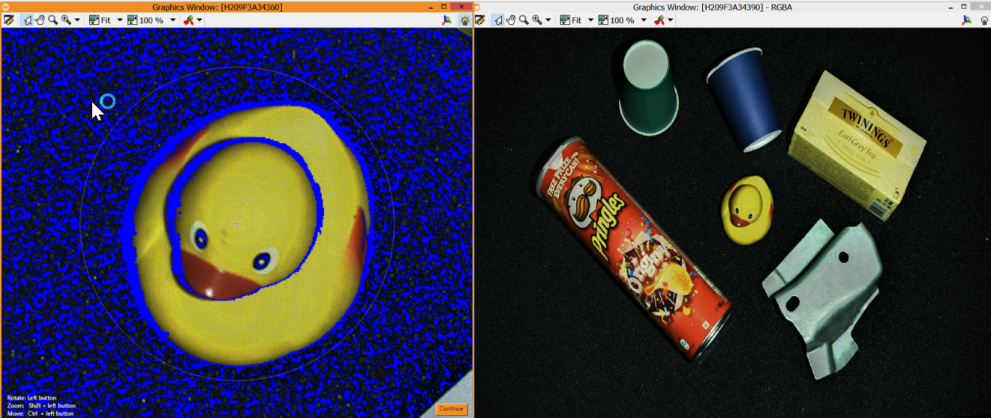
F5 키를 눌러 프로그램을 실행합니다. 이제 프로그램이 성공적으로 실행되고 장면의 3D 포인트 클라우드가 표시됩니다.
샘플을 실행하려면 이 튜토리얼을 따르고 선택 사항에서 Halcon을 선택하세요.
두 가지 샘플을 통해 포인트 클라우드를 캡처하고 저장하는 두 가지 옵션이 설명되어 있습니다.
GenICam 인터페이스와 Halcon C++ SDK 사용: CaptureHalconViaGenICam.cpp
Halcon C++ SDK를 사용하여 포인트 클라우드를 Halcon 형식으로 변환하여 Zivid SDK 사용: CaptureHalconViaZivid.cpp
샘플을 실행하려면 이 튜토리얼을 따르고 선택 사항에서 Halcon을 선택하세요.
두 가지 샘플을 통해 포인트 클라우드를 캡처하고 저장하는 두 가지 옵션이 설명되어 있습니다.
GenICam 인터페이스와 Halcon C# SDK 사용: CaptureHalconViaGenICam.cs
Halcon C# SDK를 사용하여 포인트 클라우드를 Halcon 형식으로 변환하여 Zivid SDK 사용: CaptureHalconViaZivid.cs