Unsatisfactory Hand-Eye Calibration Results (Bad Dimension Trueness)
Problem
The hand-eye calibration results are marginal, with unsatisfactory touch test results (typically z-axis error), looking like one of the following combinations:
Hand-Eye Transform |
Hand-Eye Residuals |
Projection Verification |
Touch Test |
|---|---|---|---|
Reasonable |
Marginal |
Poor |
Marginal |
Reasonable |
Good |
Good |
Marginal |
Example of marginal hand-eye calibration results
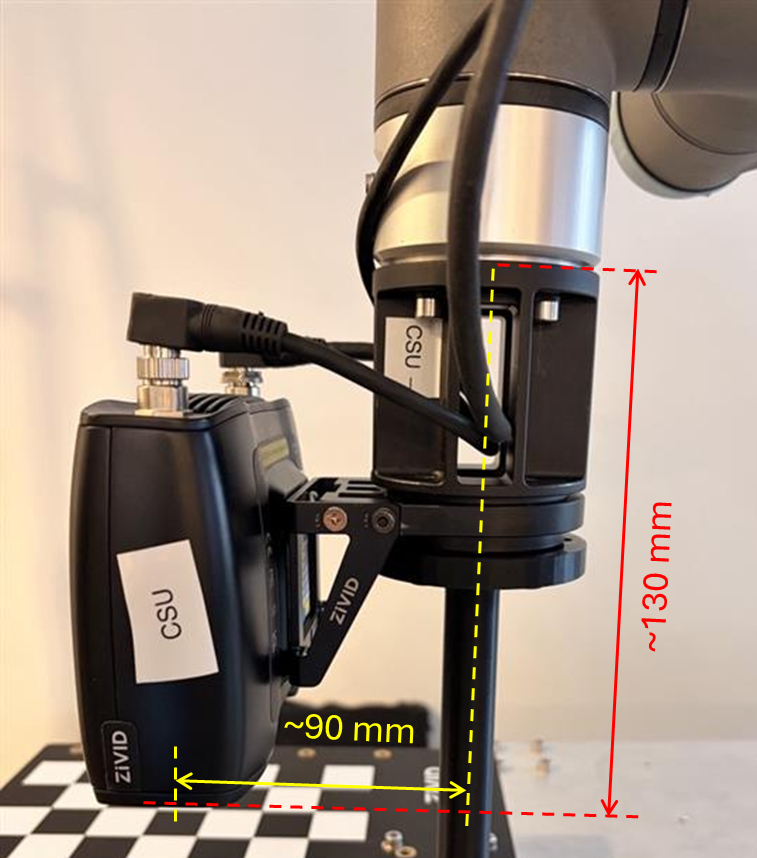
The Hand-Eye Transformation Matrix appears reasonable and is consistent with what one would expect from rough manual measurements (see table and image below).
0.999 |
-0.004 |
0.043 |
-56.879 |
0.003 |
1.000 |
0.028 |
-90.051 |
-0.043 |
-0.027 |
0.999 |
130.259 |
0 |
0 |
0 |
1 |
The calibration residuals are within an acceptable range, indicating that the optimization has converged successfully.
N (Poses) |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|
14 |
0.050 |
0.102 |
0.328 |
0.718 |
For smaller robots, we expect the residuals to be in the sub-millimeter range, while for larger robots, the residuals can be in the millimeter range. As for the rotational component of the residuals, we expect them to be in the sub-degree range.
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
0.018 |
0.070 |
2 |
0.102 |
0.187 |
3 |
0.036 |
0.118 |
4 |
0.028 |
0.275 |
5 |
0.048 |
0.426 |
6 |
0.056 |
0.374 |
7 |
0.058 |
0.537 |
8 |
0.043 |
0.458 |
9 |
0.057 |
0.099 |
10 |
0.064 |
0.569 |
11 |
0.034 |
0.203 |
12 |
0.053 |
0.334 |
13 |
0.025 |
0.220 |
14 |
0.082 |
0.718 |
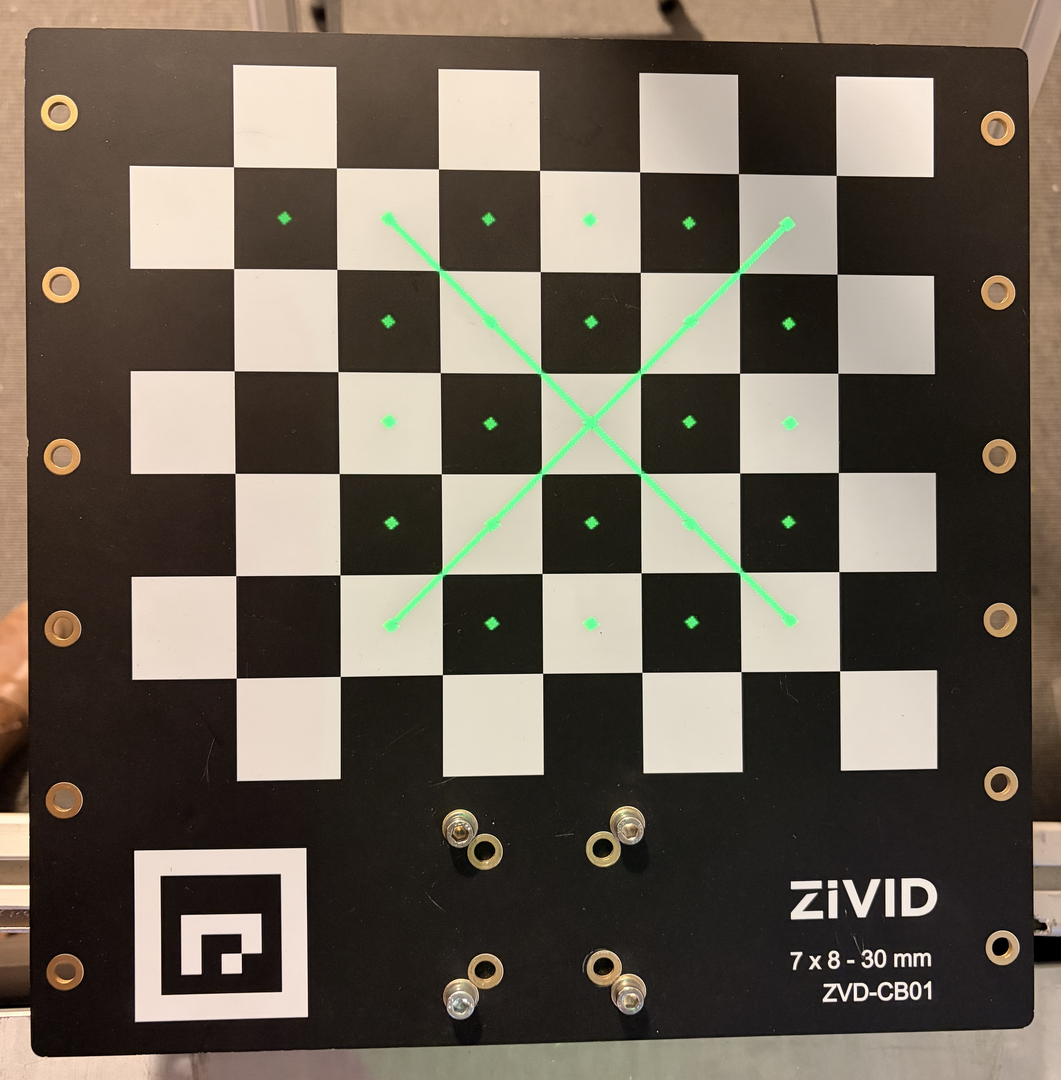
Verification by Projection succeeds.
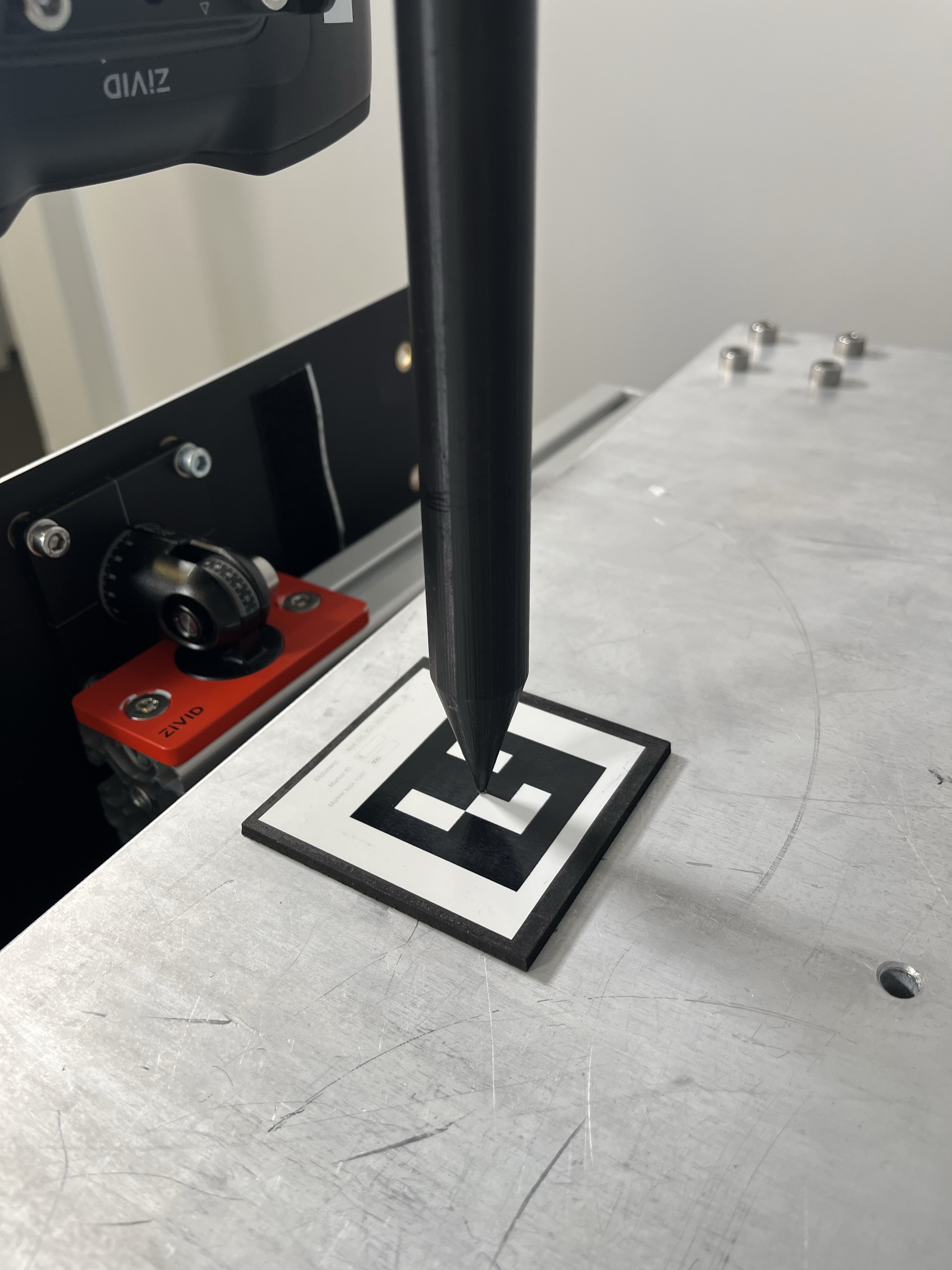
The touch test result is unsatisfactory. For example, the tip of the touch test tool pushes on the ArUco marker (z-axis error).
Potential Cause
The camera’s dimension trueness is not sufficiently good.
Zivid cameras are made to withstand industrial working environments and continue to provide quality point clouds. However, there are situations that can affect the camera’s dimension trueness and lead to unsatisfactory hand-eye calibration results. In these situations, running the Infield Correction can bring the dimension trueness to an acceptable level and improve hand-eye calibration accuracy.
When should Infield Correction be performed?
The camera experienced a mild collision.
The camera was mishandled (for example, dropped).
The camera experienced substantial environmental changes.
The application has high or very high accuracy requirements.
Potential Solution
Perform Infield Correction.
Repeat the hand-eye calibration using the same dataset.
Verify the hand-eye calibration results (transform, residuals, projection).
Re-run the touch test (if the hand-eye calibration results are good).
Reproducing the issue (marginal dimension trueness)
Bad Dataset (before infield correction)
A camera with unsatisfactory dimension trueness was used for hand-eye calibration. The calibration resulted in the following results:
0.999 |
-0.004 |
0.043 |
-56.879 |
0.003 |
1.000 |
0.028 |
-90.051 |
-0.043 |
-0.027 |
0.999 |
130.259 |
0 |
0 |
0 |
1 |
N (Poses) |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|
14 |
0.050 |
0.102 |
0.328 |
0.718 |
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
0.018 |
0.070 |
2 |
0.102 |
0.187 |
3 |
0.036 |
0.118 |
4 |
0.028 |
0.275 |
5 |
0.048 |
0.426 |
6 |
0.056 |
0.374 |
7 |
0.058 |
0.537 |
8 |
0.043 |
0.458 |
9 |
0.057 |
0.099 |
10 |
0.064 |
0.569 |
11 |
0.034 |
0.203 |
12 |
0.053 |
0.334 |
13 |
0.025 |
0.220 |
14 |
0.082 |
0.718 |
Verification by Projection succeeded.
The touch test result was unsatisfactory as the tip of the touch test tool pushed on the ArUco marker (z-axis error).
Good Dataset (after infield correction)
Infield correction was performed to improve the camera’s dimension trueness and the hand-eye calibration was repeated. The calibration resulted in the following results:
0.999 |
-0.004 |
0.043 |
-56.870 |
0.003 |
1.000 |
0.027 |
-90.409 |
-0.043 |
-0.027 |
0.999 |
128.381 |
0 |
0 |
0 |
1 |
N (Poses) |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|
14 |
0.056 |
0.115 |
0.276 |
0.382 |
Complete Residuals
Pose |
Rotation (°) |
Translation (mm) |
|---|---|---|
1 |
0.070 |
0.194 |
2 |
0.050 |
0.280 |
3 |
0.075 |
0.341 |
4 |
0.050 |
0.382 |
5 |
0.055 |
0.127 |
6 |
0.030 |
0.310 |
7 |
0.052 |
0.204 |
8 |
0.018 |
0.333 |
9 |
0.019 |
0.251 |
10 |
0.089 |
0.355 |
11 |
0.023 |
0.377 |
12 |
0.111 |
0.098 |
13 |
0.027 |
0.265 |
14 |
0.115 |
0.346 |
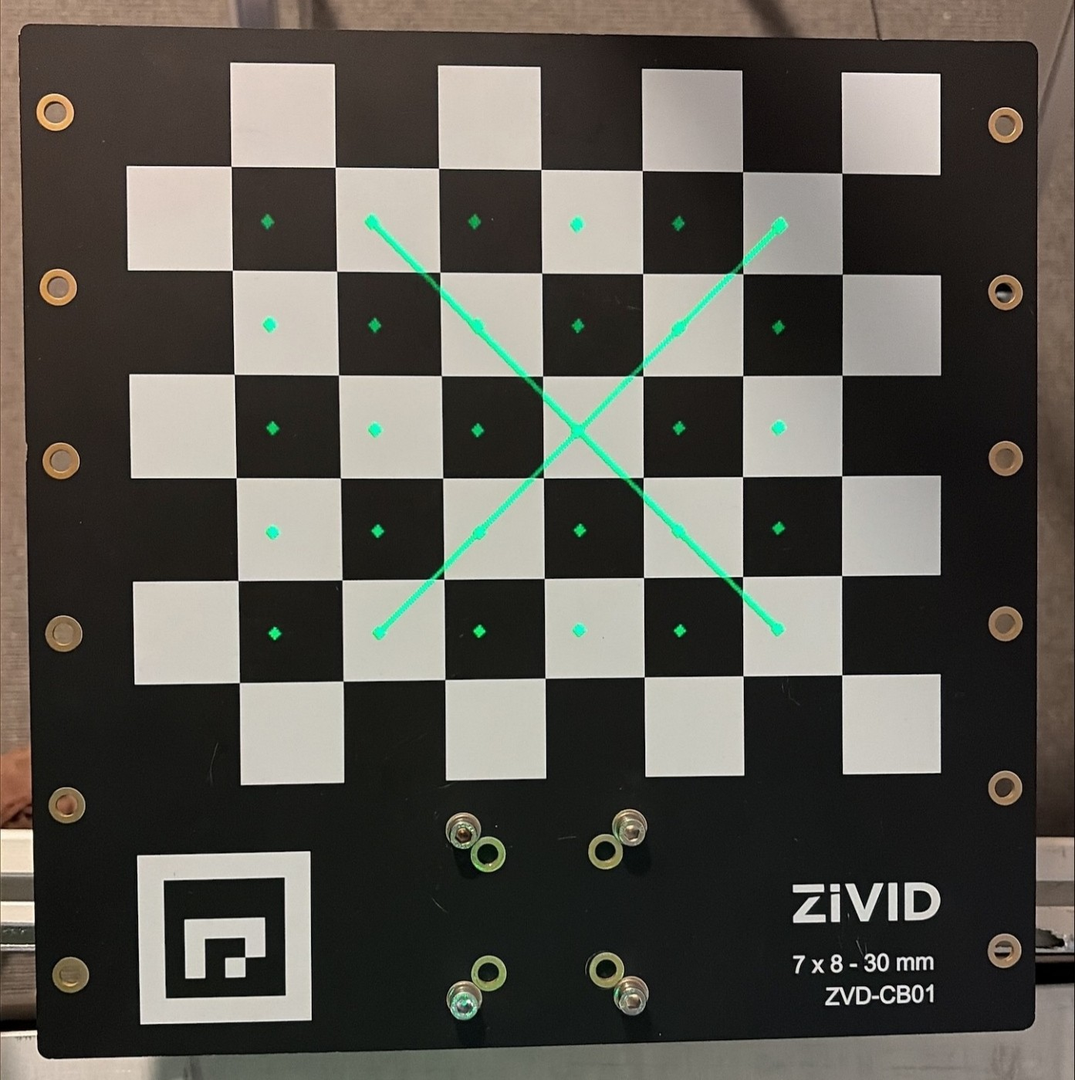
Verification by Projection was successful.
The Hand-Eye calibration was then verified with a touch test.
The touch test was successful, which confirms that the hand-eye calibration is correct and accurate.
Comparisons
The results between hand-eye calibration matrices (translation values) and hand-eye calibration residuals are compared in the tables below.
Dataset |
X (mm) |
Y (mm) |
Z (mm) |
|---|---|---|---|
Bad (before infield correction) |
-56.879 |
-90.051 |
130.259 |
Good (after infield correction) |
-56.870 |
-90.409 |
128.381 |
Δ (Good - Bad) |
0.009 |
-0.358 |
-1.878 |
Dataset |
N |
Rot. avg (°) |
Rot. max (°) |
Trans. avg (mm) |
Trans. max (mm) |
|---|---|---|---|---|---|
Bad (before infield correction) |
14 |
0.050 |
0.102 |
0.328 |
0.718 |
Good (after infield correction) |
14 |
0.056 |
0.115 |
0.276 |
0.382 |