Region of Interest(感兴趣区域)
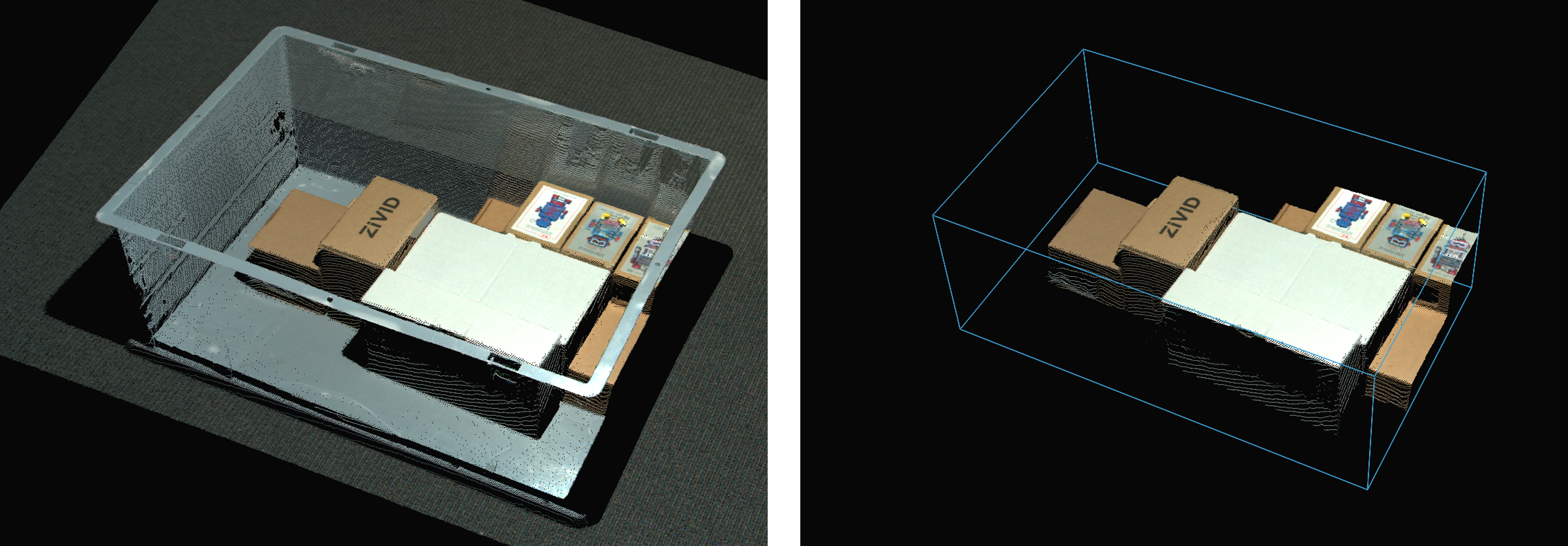
感兴趣区域 (ROI) 可用于移除用户定义的感兴趣区域之外的点。 ROI可以是3D点云中的框、距离相机的一段z值范围(深度过滤),或两者兼而有之。
如果应用程序只需要一部分视野而不是整个场景,那么ROI功能会很有用。例如,如果您想要检测料箱中的零件,相对于针对真个场景进行检测,您的检测算法可能会受益于搜索空间减少的料箱*内部*空间。
备注
ROI 不会 减少捕获时间。它属于后处理,所以会增加几毫秒的捕获时间。但是,它直接在GPU中进行处理,所以可能比第三方实现方法更快。
盒子定义的ROI
三个点(point) 定义了盒子的底面, 两个范围(extent) 定义了盒子的高度:
这三个点在3D相机参考系中给出,并定义了盒子的基平面。自动找到第四个点以将基平面绑定到坐标系中并完成矩形的设定。三点依次构成两个向量:
点O是向量的原点。
点A定义了从原点生成的第一个向量。
点B定义了从原点生成的第二个向量。
两个范围(extent)将基坐标系挤压成一个框。由点 O、点A和点B定义的向量 OA 和 OB 的叉积给出了范围(extent)的方向。因此,负范围(extent)将沿叉积的相反方向延伸。
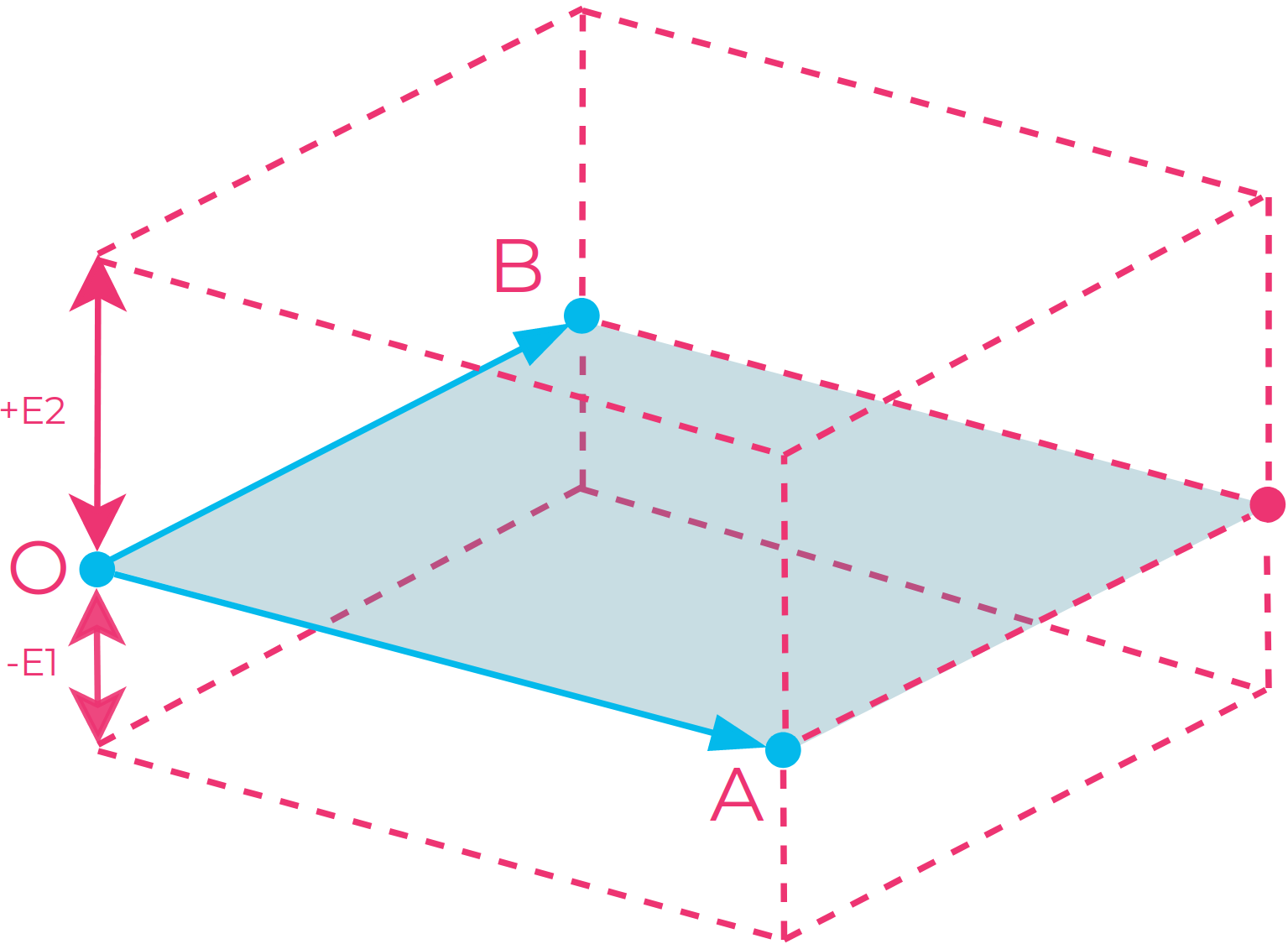
ROI盒的示意图:三个点(O、A和B)定义了框的底部平面,并自动选择第四个点来完成矩形。然后可以向上 (+E2) 和向下 (-E1) 拉伸由四个点定义的有界平面以完成框的定义。
备注
ROI盒的基坐标系 没有 被限制为一个角垂直的矩形。因此可以定义一个平行四边形作为底面,并定义一个平行六面体的ROI盒。
小技巧
请遵循以下经验法则来选择三个定义点:
在任意的一个角落选择点O。
选择点A,使点B位于相对于点A 逆时针 方向的位置。
在点A逆时针方向的某个位置选择点B。
这样,范围(extents)将具有朝向相机的正方向。
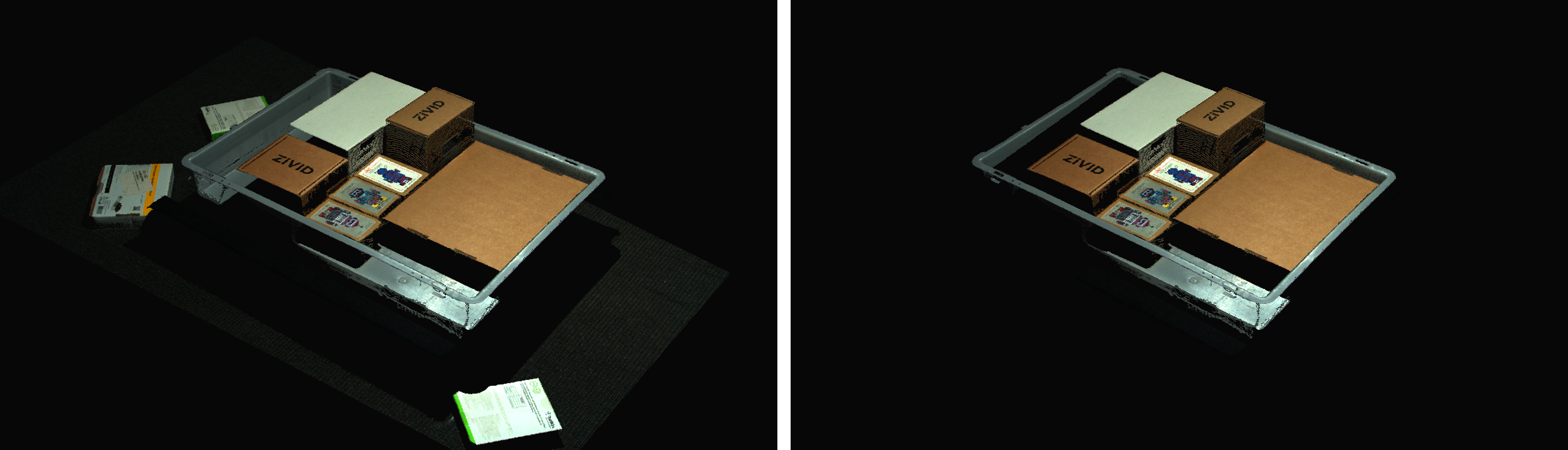
深度范围定义的ROI
ROI也可以由相机的z值范围定义,即保留 最小深度阈值 和 最大深度阈值 范围内的点。如果场景的前方或后方有需要过滤的点,那么这种方式将会很有用。请注意,z值是基于相机参考系给出的,即垂直于相机方向进行过滤。因此,如果相机垂直安装在您要拍摄的物体上,效果最佳。
表现
备注
ROI功能在每个3D捕获中将增加以下处理时间:
过滤器 |
Intel UHD i5G1 |
NVIDIA 4070 |
Intel UHD 770 |
|---|---|---|---|
Low-end [1] |
High-end [2] |
||
RegionOfInterest - Box |
4 (±4) ms |
0 (±1) ms |
3 (±1) ms |
RegionOfInterest - Depth |
2 (±5) ms |
0 (±1) ms |
0 (±1) ms |
查看 感兴趣区域(ROI)的使用教程 以获得有关在您的应用中使用ROI的更深入的教程。
版本历史
SDK |
变更 |
|---|---|
2.9.0 |
新增了ROI API。 |