感兴趣区域(ROI)的使用教程
感兴趣区域 (ROI) 可用于移除用户定义的感兴趣区域之外的点。 ROI可以是3D点云中的框、距离相机的一段z值范围(深度过滤),或两者兼而有之。
如果应用程序只需要一部分视野而不是整个场景,那么ROI功能会很有用。例如,如果您想要检测料箱中的零件,相对于针对真个场景进行检测,您的检测算法可能会受益于搜索空间减少的料箱*内部*空间。
备注
ROI 不会 减少捕获时间。它属于后处理,所以会稍微增加捕获时间。但是,它直接在GPU中进行处理,所以可能比第三方实现方法更快。
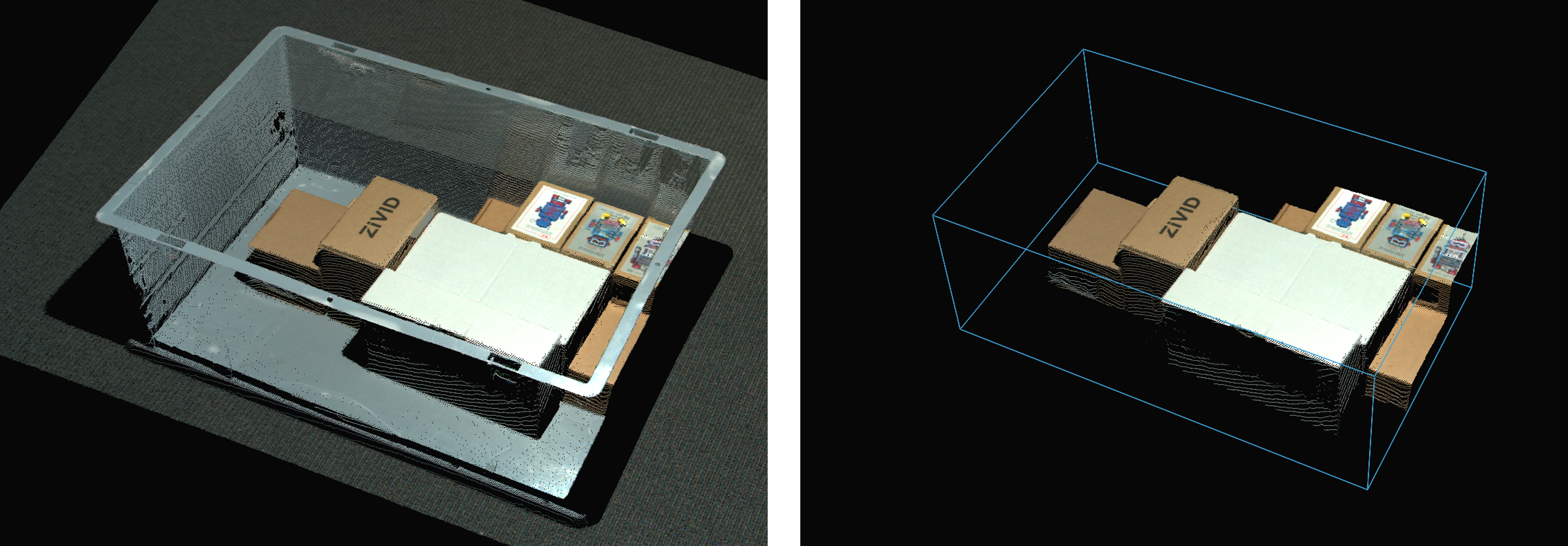
盒子定义的ROI
三个点(point) 定义了盒子的底面, 两个范围(extent) 定义了盒子的高度:
这三个点在3D相机参考系中给出,并定义了盒子的基平面。自动找到第四个点以将基平面绑定到坐标系中并完成矩形的设定。三点依次构成两个向量:
点O是向量的原点。
点A定义了从原点生成的第一个向量。
点B定义了从原点生成的第二个向量。
两个范围(extent)将基坐标系挤压成一个框。由点 O、点A和点B定义的向量 OA 和 OB 的叉积给出了范围(extent)的方向。因此,负范围(extent)将沿叉积的相反方向延伸。
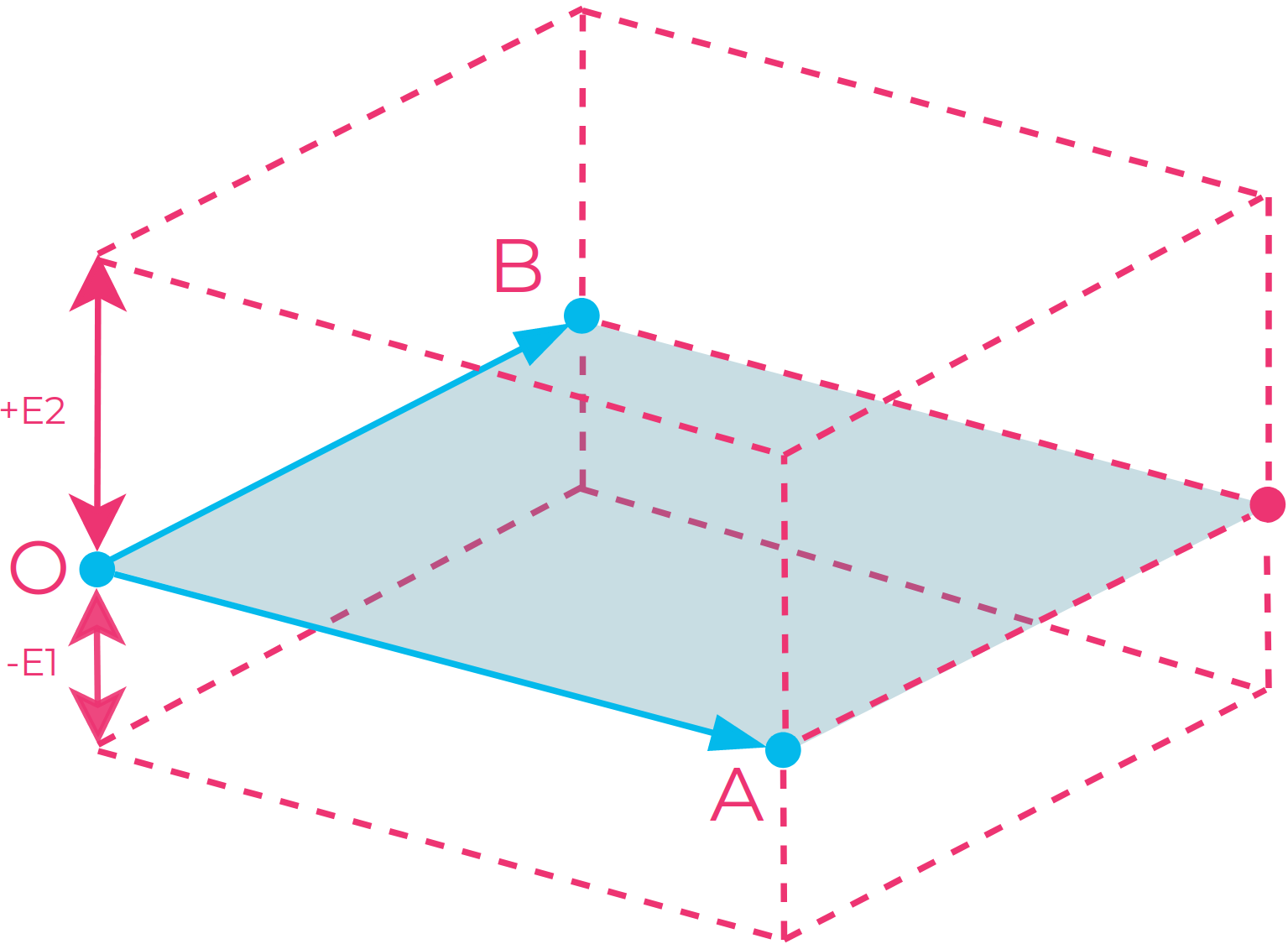
ROI盒的示意图:三个点(O、A和B)定义了框的底部平面,并自动选择第四个点来完成矩形。然后可以向上 (+E2) 和向下 (-E1) 拉伸由四个点定义的有界平面以完成框的定义。
备注
ROI盒的基坐标系 没有 被限制为一个角垂直的矩形。因此可以定义一个平行四边形作为底面,并定义一个平行六面体的ROI盒。
小技巧
请遵循以下经验法则来选择三个定义点:
在任意的一个角落选择点O。
选择点A,使点B位于相对于点A 逆时针 方向的位置。
在点A逆时针方向的某个位置选择点B。
这样,范围(extents)将具有朝向相机的正方向。
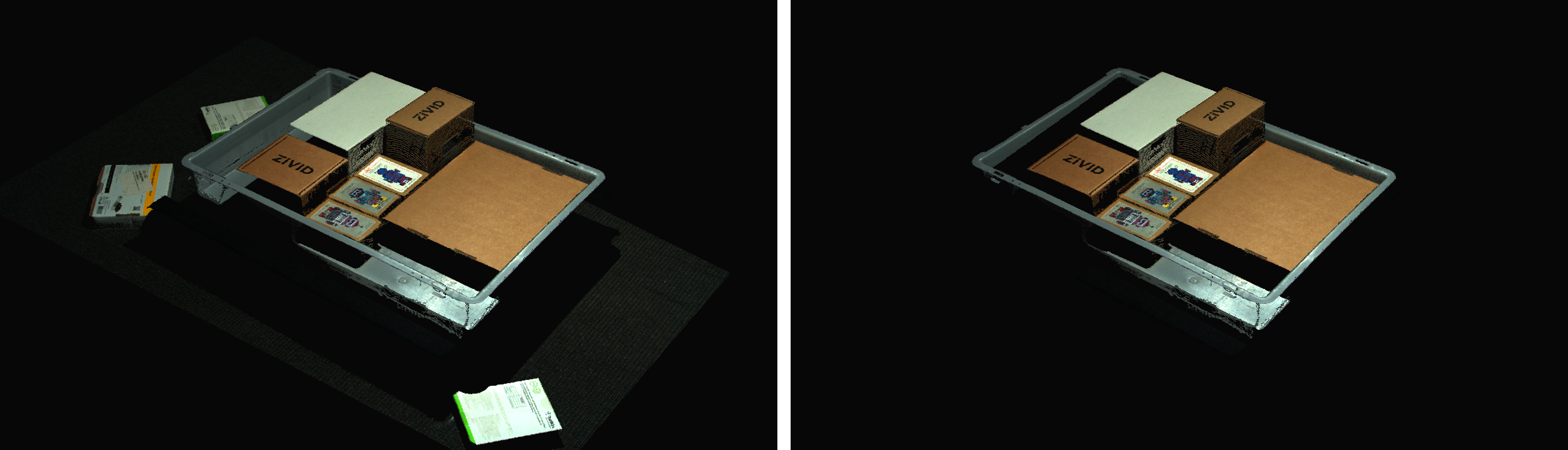
深度范围定义的ROI
ROI也可以由相机的z值范围定义,即保留 最小深度阈值 和 最大深度阈值 范围内的点。如果场景的前方或后方有需要过滤的点,那么这种方式将会很有用。请注意,z值是基于相机参考系给出的,即垂直于相机方向进行过滤。因此,如果相机垂直安装在您要拍摄的物体上,效果最佳。
ROI API
ROI是 相机设置 的一部分,在Zivid SDK主设置对象下进行设置。因此,它在*当您捕获时*应用,而不是之后应用在点云对象上。

std::cout << "Configuring settings for capture:" << std::endl;
Zivid::Settings settings{
Zivid::Settings::Experimental::Engine::phase,
Zivid::Settings::Sampling::Color::rgb,
Zivid::Settings::Sampling::Pixel::all,
Zivid::Settings::RegionOfInterest::Box::Enabled::yes,
Zivid::Settings::RegionOfInterest::Box::PointO{ 1000, 1000, 1000 },
Zivid::Settings::RegionOfInterest::Box::PointA{ 1000, -1000, 1000 },
Zivid::Settings::RegionOfInterest::Box::PointB{ -1000, 1000, 1000 },
Zivid::Settings::RegionOfInterest::Box::Extents{ -1000, 1000 },
Zivid::Settings::RegionOfInterest::Depth::Enabled::yes,
Zivid::Settings::RegionOfInterest::Depth::Range{ 200, 2000 },
Zivid::Settings::Processing::Filters::Smoothing::Gaussian::Enabled::yes,
Zivid::Settings::Processing::Filters::Smoothing::Gaussian::Sigma{ 1.5 },
Zivid::Settings::Processing::Filters::Noise::Removal::Enabled::yes,
Zivid::Settings::Processing::Filters::Noise::Removal::Threshold{ 7.0 },
Zivid::Settings::Processing::Filters::Noise::Suppression::Enabled::yes,
Zivid::Settings::Processing::Filters::Noise::Repair::Enabled::yes,
Zivid::Settings::Processing::Filters::Outlier::Removal::Enabled::yes,
Zivid::Settings::Processing::Filters::Outlier::Removal::Threshold{ 5.0 },
Zivid::Settings::Processing::Filters::Reflection::Removal::Enabled::yes,
Zivid::Settings::Processing::Filters::Reflection::Removal::Experimental::Mode::global,
Zivid::Settings::Processing::Filters::Cluster::Removal::Enabled::yes,
Zivid::Settings::Processing::Filters::Cluster::Removal::MaxNeighborDistance{ 10 },
Zivid::Settings::Processing::Filters::Cluster::Removal::MinArea{ 100 },
Zivid::Settings::Processing::Filters::Experimental::ContrastDistortion::Correction::Enabled::yes,
Zivid::Settings::Processing::Filters::Experimental::ContrastDistortion::Correction::Strength{ 0.4 },
Zivid::Settings::Processing::Filters::Experimental::ContrastDistortion::Removal::Enabled::no,
Zivid::Settings::Processing::Filters::Experimental::ContrastDistortion::Removal::Threshold{ 0.5 },
Zivid::Settings::Processing::Filters::Experimental::HoleFilling::Enabled::yes,
Zivid::Settings::Processing::Filters::Experimental::HoleFilling::HoleSize{ 0.2 },
Zivid::Settings::Processing::Filters::Experimental::HoleFilling::Strictness{ 1 },
Zivid::Settings::Processing::Color::Balance::Red{ 1.0 },
Zivid::Settings::Processing::Color::Balance::Green{ 1.0 },
Zivid::Settings::Processing::Color::Balance::Blue{ 1.0 },
Zivid::Settings::Processing::Color::Gamma{ 1.0 },
Zivid::Settings::Processing::Color::Experimental::Mode::automatic
};
std::cout << settings << std::endl;
Console.WriteLine("Configuring settings for capture:");
var settings = new Zivid.NET.Settings()
{
Experimental = { Engine = Zivid.NET.Settings.ExperimentalGroup.EngineOption.Phase },
Sampling = { Color = Zivid.NET.Settings.SamplingGroup.ColorOption.Rgb, Pixel = Zivid.NET.Settings.SamplingGroup.PixelOption.All },
RegionOfInterest = { Box = {
Enabled = true,
PointO = new Zivid.NET.PointXYZ{ x = 1000, y = 1000, z = 1000 },
PointA = new Zivid.NET.PointXYZ{ x = 1000, y = -1000, z = 1000 },
PointB = new Zivid.NET.PointXYZ{ x = -1000, y = 1000, z = 1000 },
Extents = new Zivid.NET.Range<double>(-1000, 1000),
},
Depth =
{
Enabled = true,
Range = new Zivid.NET.Range<double>(200, 2000),
}
},
Processing = { Filters = { Smoothing = { Gaussian = { Enabled = true, Sigma = 1.5 } },
Noise = { Removal = { Enabled = true, Threshold = 7.0 },
Suppression = { Enabled = true },
Repair ={ Enabled = true } },
Outlier = { Removal = { Enabled = true, Threshold = 5.0 } },
Reflection = { Removal = { Enabled = true, Experimental = { Mode = ReflectionFilterModeOption.Global} } },
Cluster = { Removal = { Enabled = true, MaxNeighborDistance = 10, MinArea = 100} },
Experimental = { ContrastDistortion = { Correction = { Enabled = true,
Strength = 0.4 },
Removal = { Enabled = true,
Threshold = 0.5 } },
HoleFilling = { Enabled = true,
HoleSize = 0.2,
Strictness = 1 } } },
Color = { Balance = { Red = 1.0, Green = 1.0, Blue = 1.0 },
Gamma = 1.0,
Experimental = { Mode = ColorModeOption.Automatic } } }
};
Console.WriteLine(settings);
print("Configuring settings for capture:")
settings = zivid.Settings()
settings.experimental.engine = "phase"
settings.sampling.color = "rgb"
settings.sampling.pixel = "all"
settings.region_of_interest.box.enabled = True
settings.region_of_interest.box.point_o = [1000, 1000, 1000]
settings.region_of_interest.box.point_a = [1000, -1000, 1000]
settings.region_of_interest.box.point_b = [-1000, 1000, 1000]
settings.region_of_interest.box.extents = [-1000, 1000]
settings.region_of_interest.depth.enabled = True
settings.region_of_interest.depth.range = [200, 2000]
filters = settings.processing.filters
filters.smoothing.gaussian.enabled = True
filters.smoothing.gaussian.sigma = 1.5
filters.noise.removal.enabled = True
filters.noise.removal.threshold = 7.0
filters.noise.suppression.enabled = True
filters.noise.repair.enabled = True
filters.outlier.removal.enabled = True
filters.outlier.removal.threshold = 5.0
filters.reflection.removal.enabled = True
filters.reflection.removal.experimental.mode = "global"
filters.cluster.removal.enabled = True
filters.cluster.removal.max_neighbor_distance = 10
filters.cluster.removal.min_area = 100
filters.experimental.contrast_distortion.correction.enabled = True
filters.experimental.contrast_distortion.correction.strength = 0.4
filters.experimental.contrast_distortion.removal.enabled = False
filters.experimental.contrast_distortion.removal.threshold = 0.5
filters.experimental.hole_filling.enabled = True
filters.experimental.hole_filling.hole_size = 0.2
filters.experimental.hole_filling.strictness = 1
color = settings.processing.color
color.balance.red = 1.0
color.balance.blue = 1.0
color.balance.green = 1.0
color.gamma = 1.0
settings.processing.color.experimental.mode = "automatic"
print(settings)
教程
查看以下教程,了解如何使用ROI API的示例。
版本历史
SDK |
变更 |
|---|---|
2.9.0 |
添加了ROI API。 |