Reflection Filter
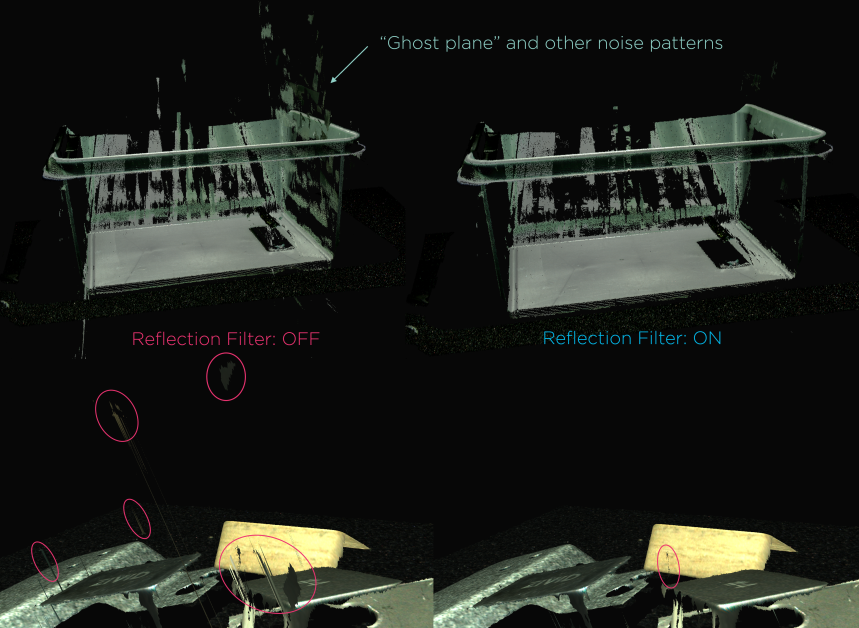
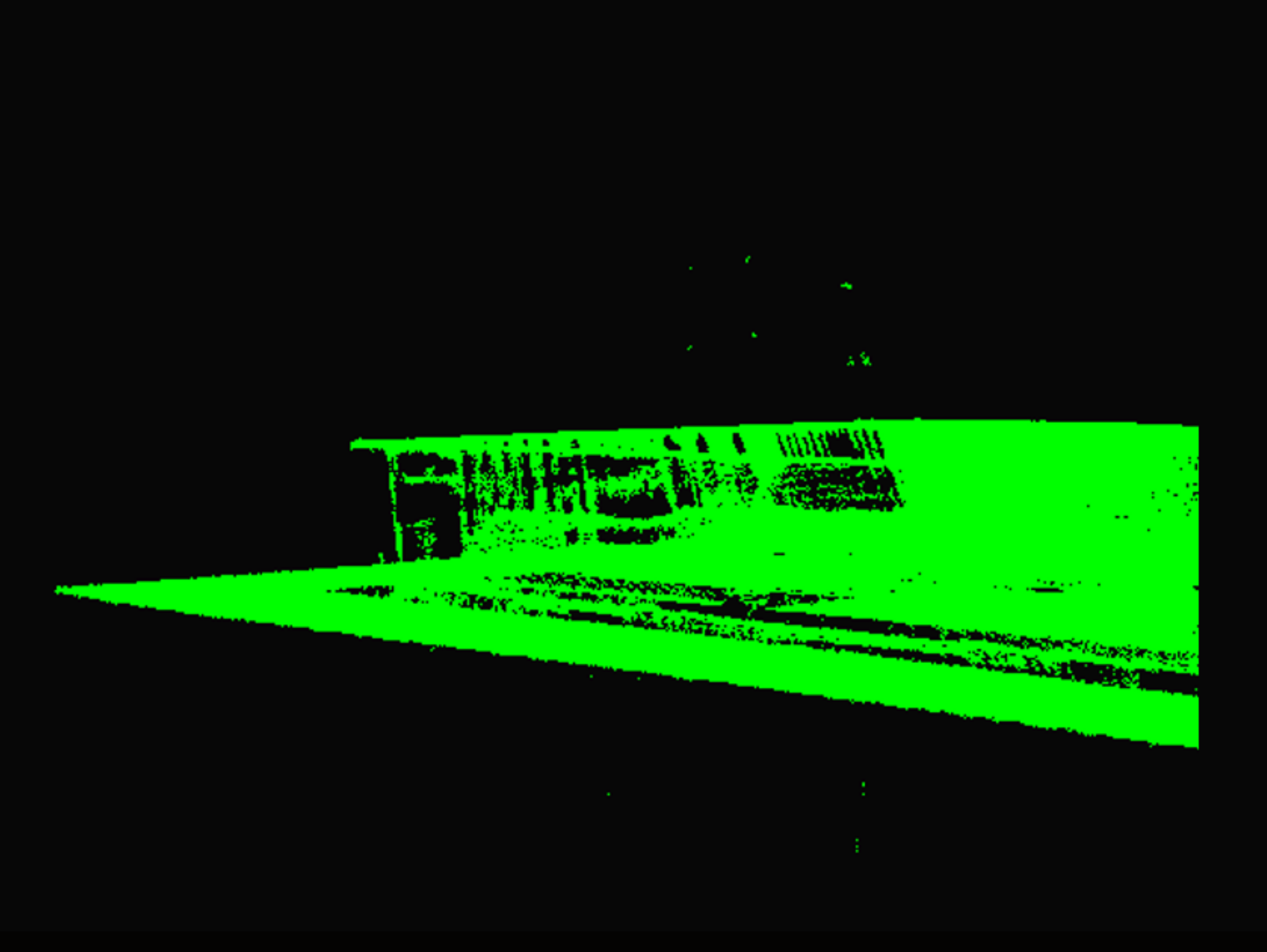
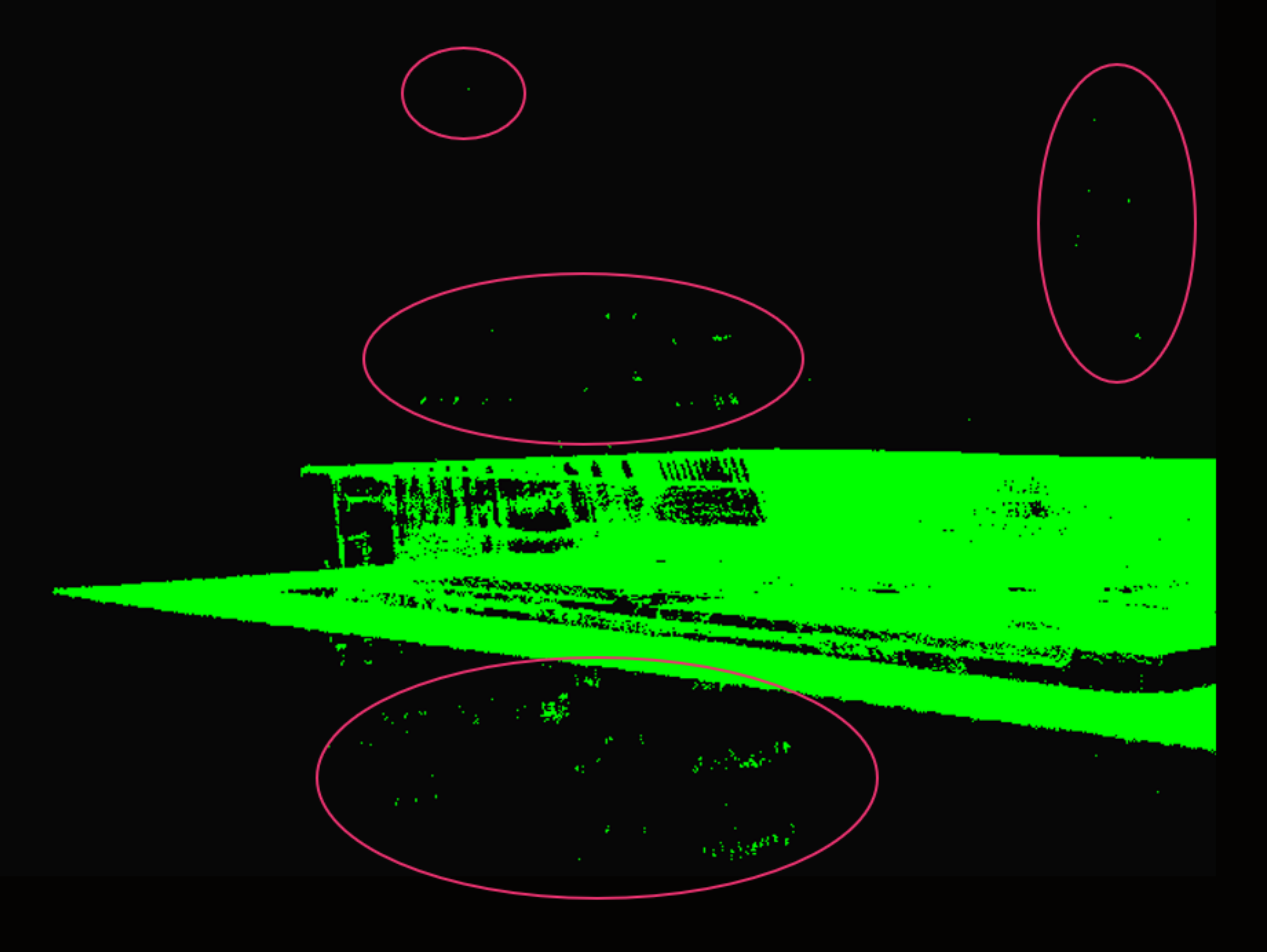
The Reflection filter removes points that Zivid deem as impacted by reflection and thus erroneous. These are typically seen in the point cloud as “ghost planes” - small regions of points floating mid-air that shouldn’t be there.
Zivid knows how the signals it sends out from the projector should look like. For this reason it is possible to assess whether or not the data that is read back by the camera makes sense. The reflection filter, therefore, attempts to discard pixels that are deemed to be tampered with as a result of one of the following:
Interreflections
Excessive movements in the scene
Alternating alien light sources
For example a second Zivid 3D camera that projects onto the same scene at the same time.
Note
Enabling the Reflection filter adds certain amount of processing time per acquisition; see below.
The following values should be used:
Value |
Condition |
|
If you know that your scene is not reflective, and you want to optimize acquisition time. |
|
Turn on if you have issues detecting parts that are reflective or are inside a reflective bin. |
Mode |
Pros |
|
|
|
|
|
|
|
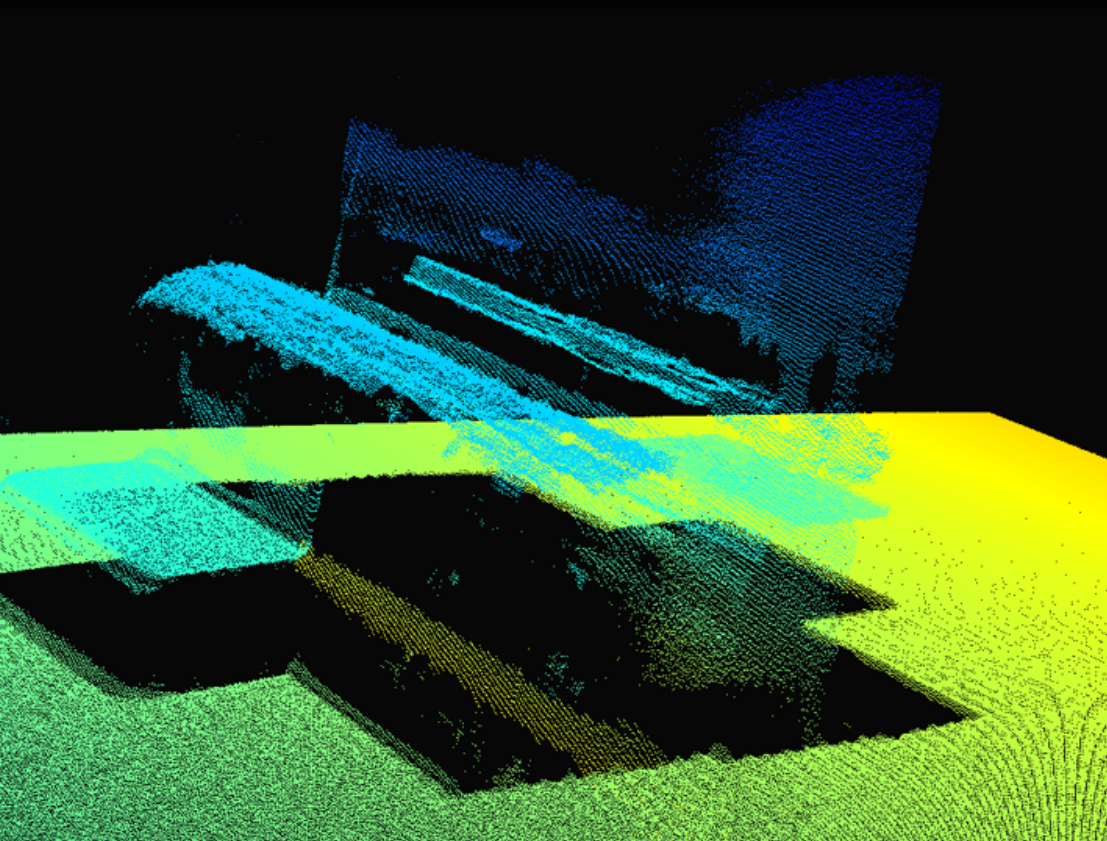
Reflection Filter disabled (ghost plane) |
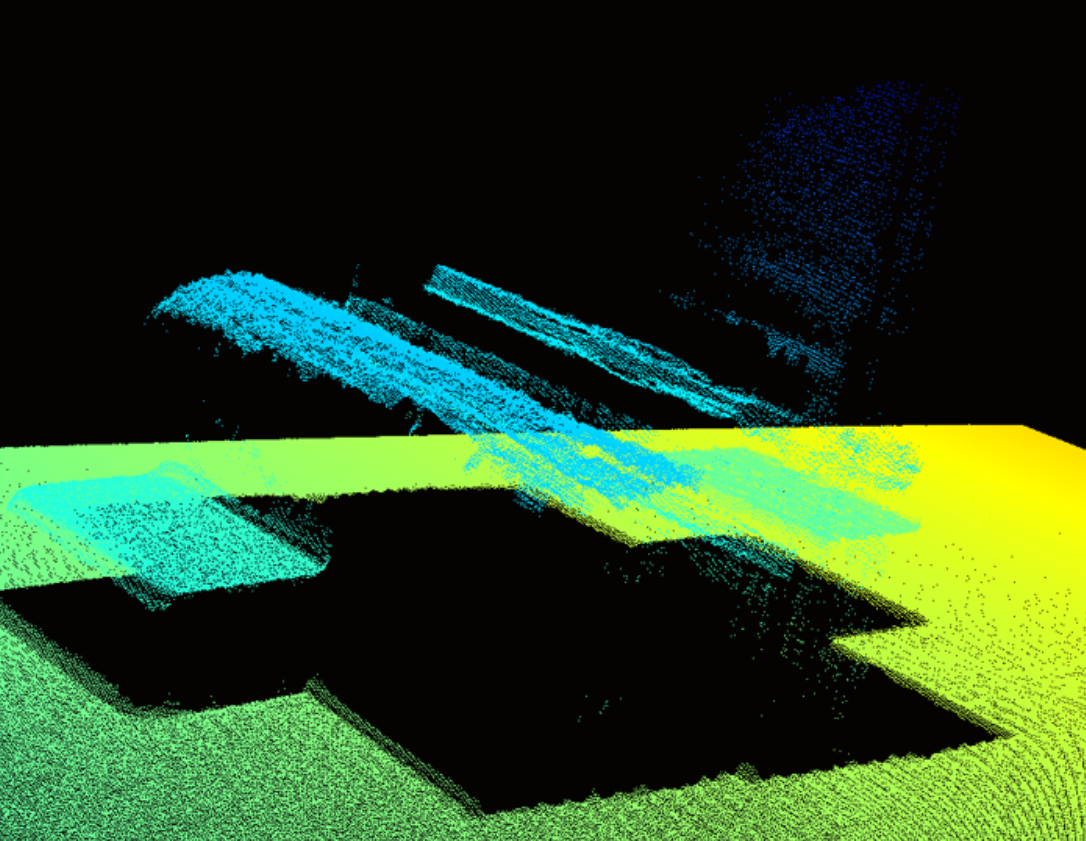
Reflection Filter enabled - Global mode (smaller ghost plane) |
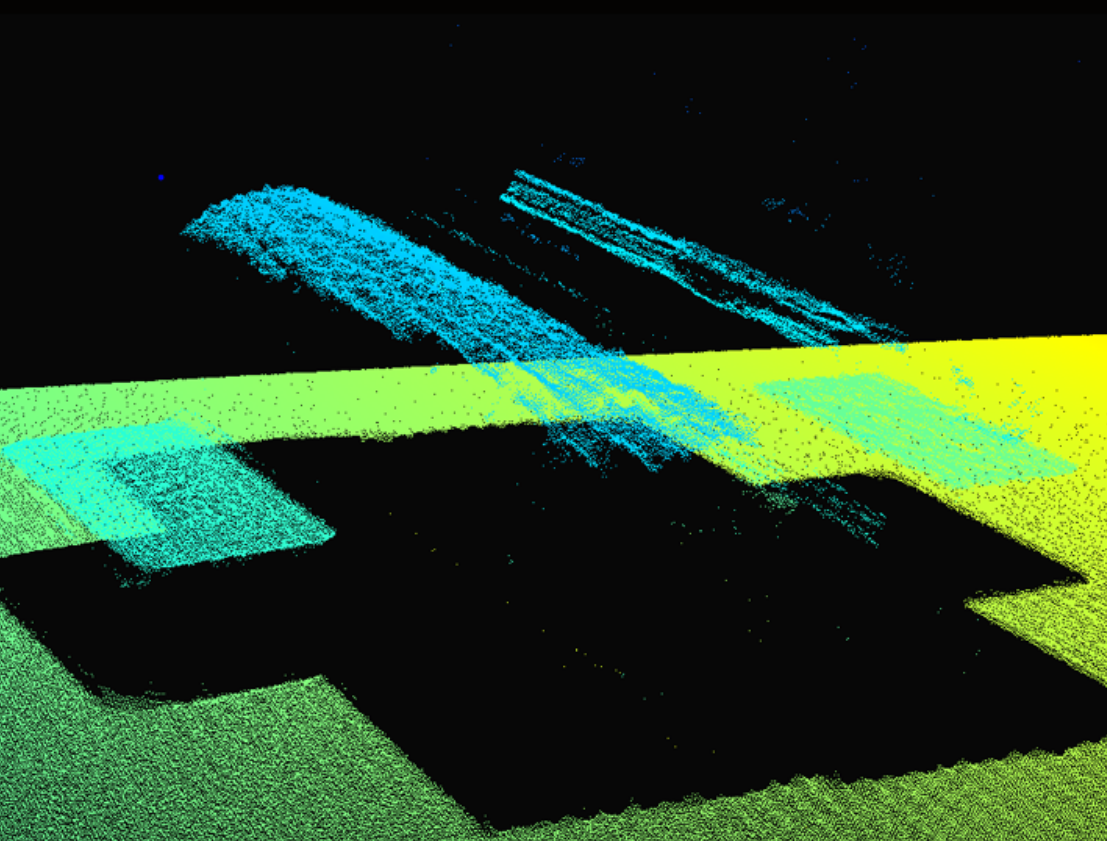
Reflection Filter enabled - Local mode (no ghost plane) |
|
|
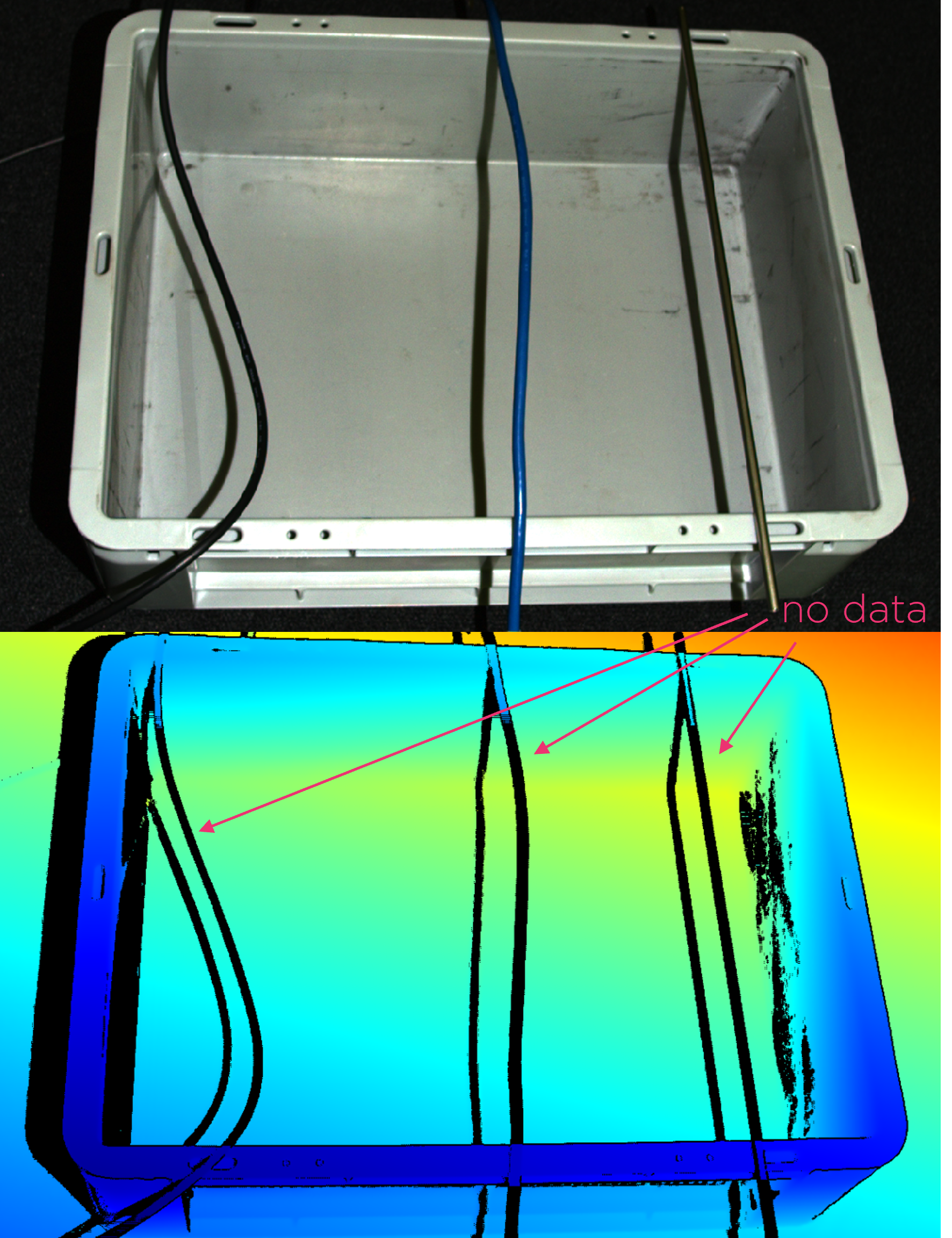
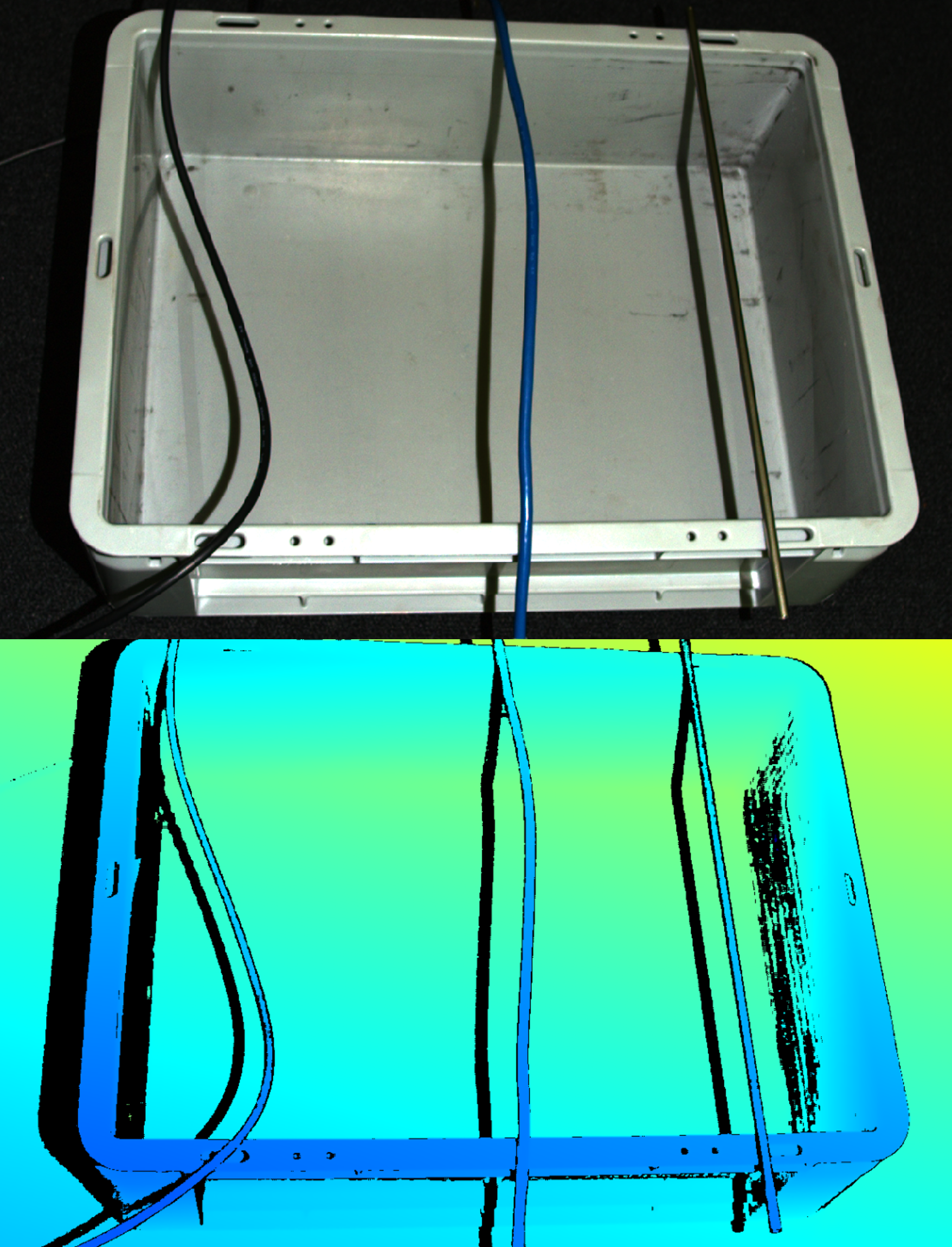
Reflection Filter - Global mode (no data on thin objects) |
Reflection Filter - Local mode (data preserved on thin objects) |
|
|
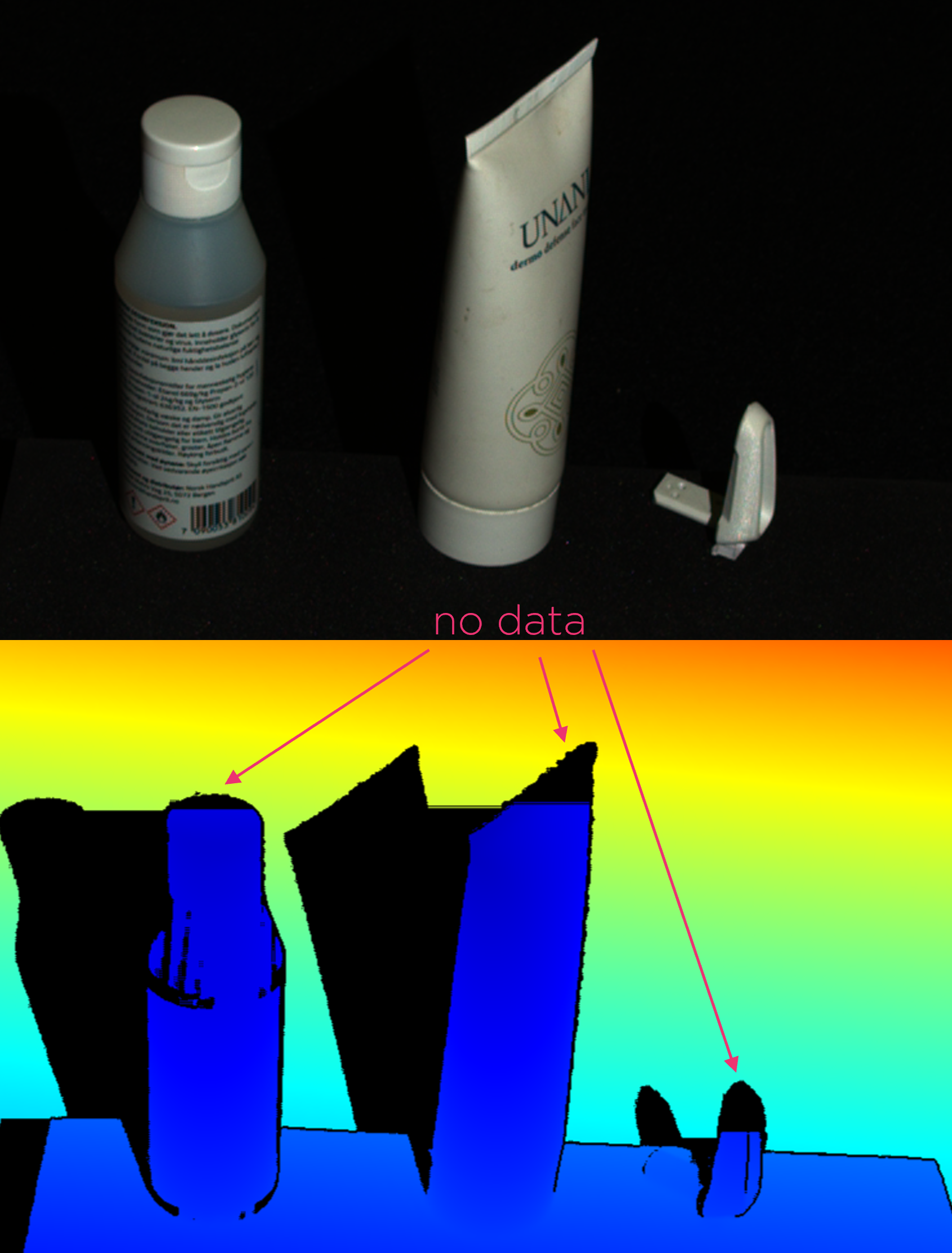
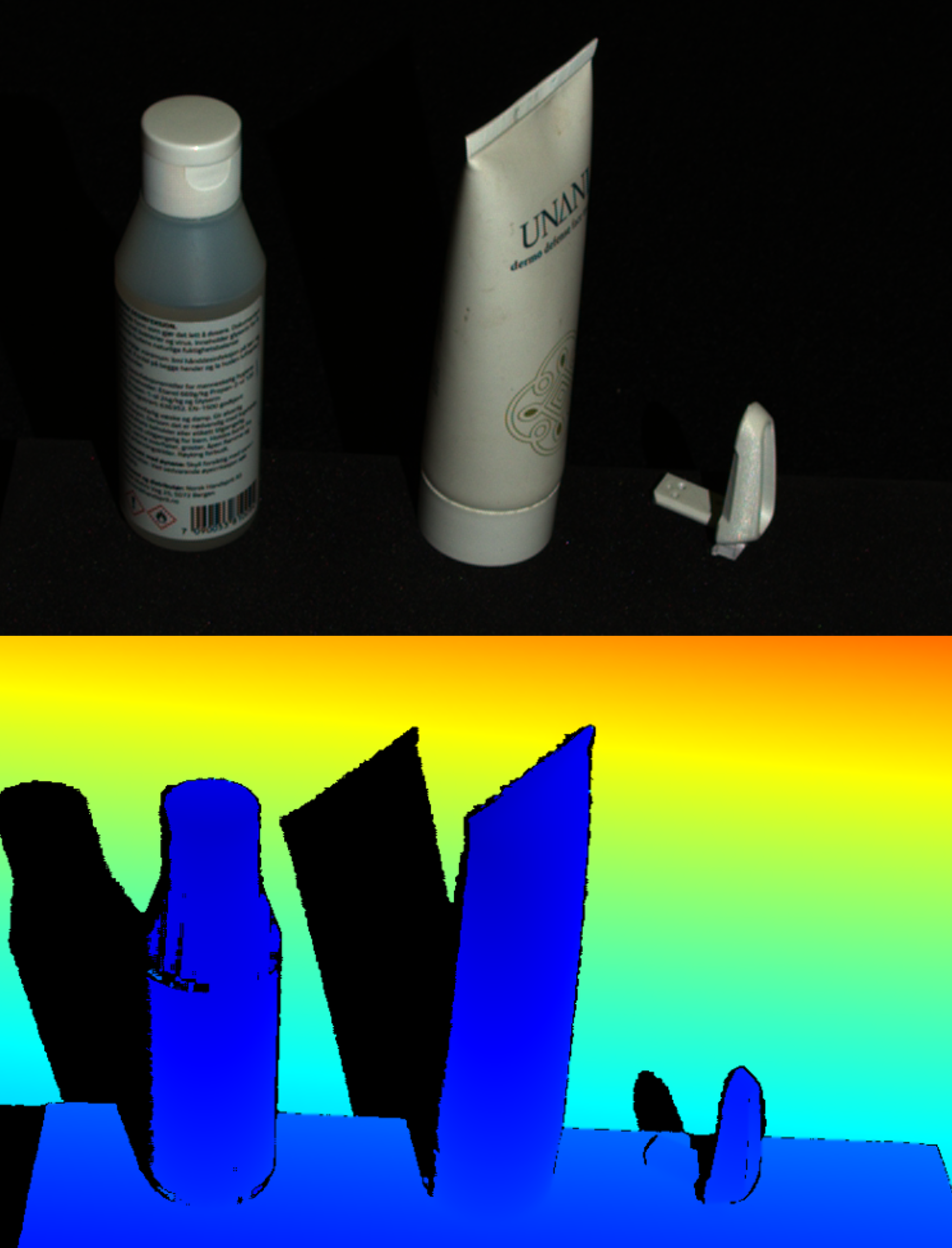
Reflection Filter - Global mode (no data on pointy objects) |
Reflection Filter - Local mode (data preserved on pointy objects) |
|
|
Reflection Filter - Global mode (less outliers) |
Reflection Filter - Local mode (more outliers) |
Hint
The local mode of the reflection filter may leave isolated floating points. This is what the Cluster Filter can compensate for.
Note
Reflection filter (Global mode) adds the following processing time per 3D capture:
Filter |
Zivid One+ |
Zivid Two |
||||
|---|---|---|---|---|---|---|
Intel UHD 750 |
Intel UHD G1 |
NVIDIA 3070 |
Intel UHD 750 |
Intel UHD G1 |
NVIDIA 3070 |
|
High-end [1] |
Low-end [2] |
High-end [3] |
High-end [1] |
Low-end [2] |
High-end [3] |
|
Reflection Global |
12 (±2) ms |
33 (±2) ms |
15 (±0.6) ms |
21 (±1) ms |
29 (±414) ms |
14 (±0.9) ms |
Reflection Local |
20 (±3) ms |
26 (±2) ms |
4 (±0.6) ms |
21 (±3) ms |
25 (±474) ms |
3 (±0.9) ms |
Version History
SDK |
Changes |
|---|---|
2.7.0 |
Reflection filter is updated with a new mode called Local. Old mode is renamed to Global. |
1.4.0 |
Reflection filter is improved to remove fewer good points. |