Failed to detect Zivid calibration board
Problem
Zivid SDK is not able to detect the checkerboard during hand-eye calibration or infield correction/verification.
Possible causes and solutions
When using the Zivid calibration board, the fiducial/ArUco marker must be visible in the image. Otherwise, the checkerboard detection will fail when performing infield correction or hand-eye calibration. This is not required when using the 9x6 grey-white checkerboards as they don’t have a fiducial marker on them. However, we recommend using the calibration boards as these have been qualified and individually verified by Zivid. Also, support for 9x6 grey-white checkerboards was removed in SDK 2.14.
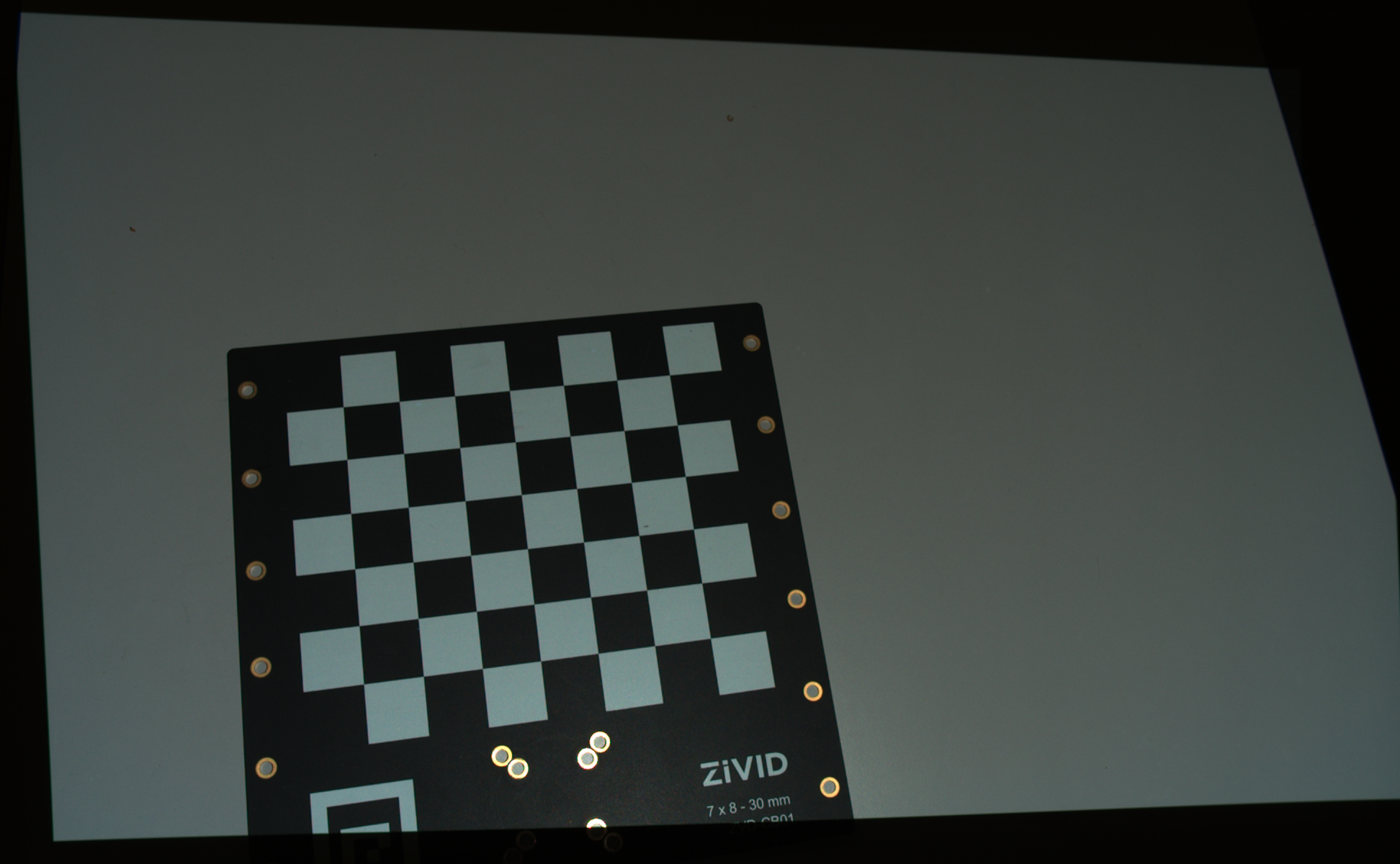 Non-visible fiducial marker
Non-visible fiducial marker
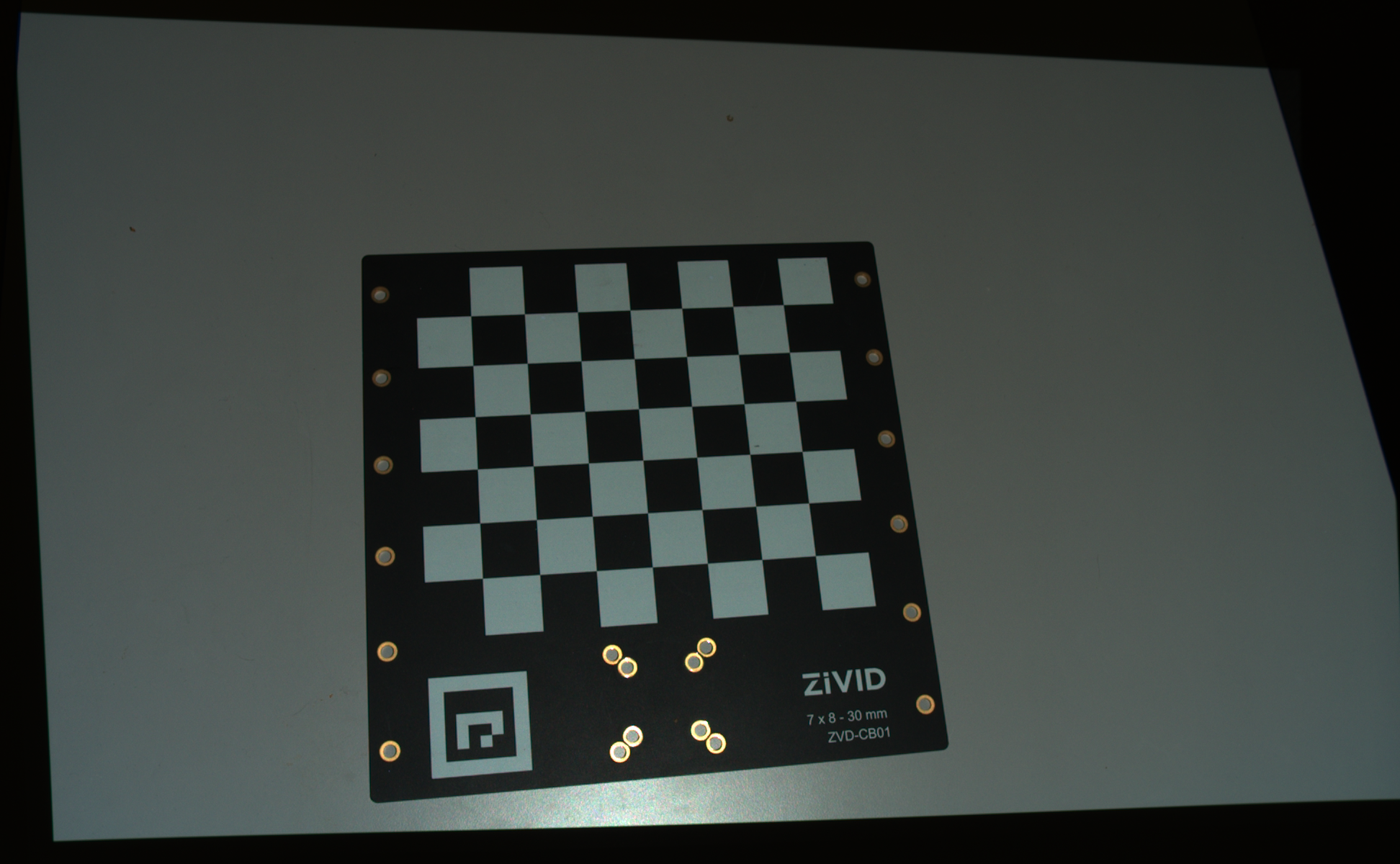 Visible fiducial marker
Visible fiducial marker
Tip
Use Zivid Studio to inspect if the capture is good
Note that the SDK does not throw an error if the function is not able to detect any feature points.
It will instead return an empty list.
The reasoning is that not finding a checkerboard in a point cloud is considered a normal failure and not an (exceptional) error.
Therefore, we recommend validating the detection result after capturing using valid() operator.
The code below illustrates how to implement this in a program.

const auto detectionResult = Zivid::Calibration::detectCalibrationBoard(frame);
if(detectionResult.valid())
{
std::cout << "Calibration board detected " << std::endl;
handEyeInput.emplace_back(robotPose, detectionResult);
currentPoseId++;
}
else
{
std::cout << "Failed to detect calibration board. " << detectionResult.statusDescription() << std::endl;
}
using (var frame = camera.Capture2D3D(settings))
{
var detectionResult = Detector.DetectCalibrationBoard(frame);
if (detectionResult.Valid())
{
Console.WriteLine("Calibration board detected");
handEyeInput.Add(new HandEyeInput(robotPose, detectionResult));
++currentPoseId;
}
else
{
Console.WriteLine("Failed to detect calibration board, ensure that the entire board is in the view of the camera");
}
}
detection_result = zivid.calibration.detect_calibration_board(frame)
if detection_result.valid():
print("Calibration board detected")
hand_eye_input.append(zivid.calibration.HandEyeInput(robot_pose, detection_result))
current_pose_id += 1
else:
print(f"Failed to detect calibration board. {detection_result.status_description()}")