处理强环境光
环境光对于Zivid相机而言是指什么?
Zivid相机除了本身的投影仪以外,不需要任何其它光源来获取3D数据。 Zivid相机用于生成点云的信号是由投影仪创建的场景照度。 外部环境光产生的场景照度对于Zivid来说是噪声。点云质量很大程度上取决于 Signal-to-Noise ratio (信噪比)。因此,环境光越弱,噪声越低,点云就越好。
备注
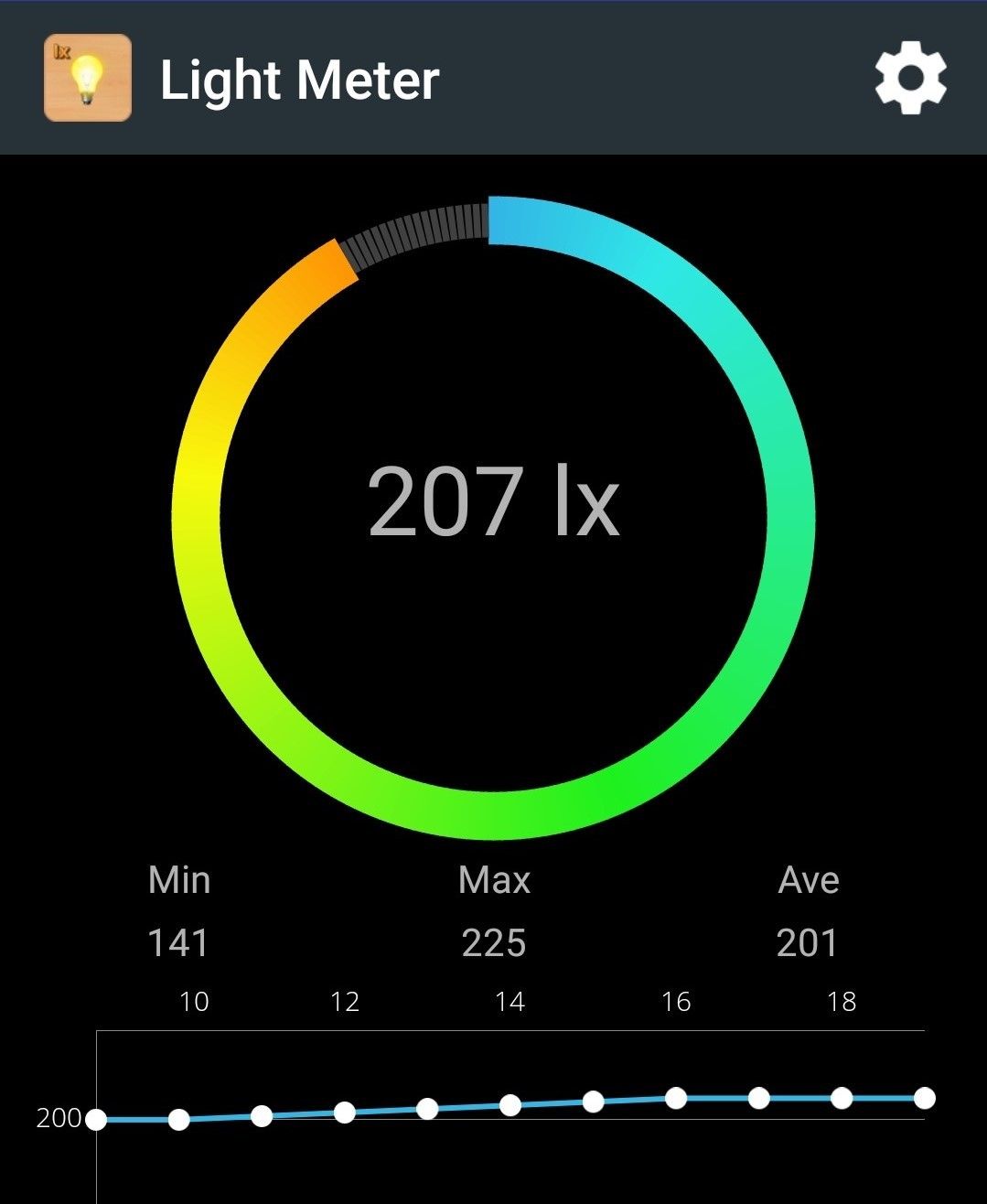
照度的单位为勒克斯 (lx) ,是入射到单位面积表面上的总光功率。光功率的单位为流明 (lm) ,是单位时间内光源发出的可见光总量的量度。
请查阅我们的 datasheets ,以根据场景的照度测量结果检查预期的噪声水平。
如何防止环境光造成影响?
处理环境光的最佳方法是消除它。因此,请关闭Zivid相机附近所有不必要的光源。如果很难或不可能移除光源,请通过在场景周围放置挡光板来防止它照射场景。您不需要使用金属遮挡物,深色的窗帘就足够了。
如何减轻环境光造成的影响?
如果无法阻止外部光源照射场景,请遵循以下准则尽量减少其影响。
- 一般建议
- 采集设置
- Projector Brightness(投影仪亮度)
通过将投影仪的亮度设置到最大值 (1.8) 来增加信号强度, 这将增大SNR。
- Gain(增益)
通过将增益设置到最小值 (1.0) 来最小化噪声影响。增益会将噪声与信号一起放大,这不是希望在此场景中发生的情况。
- Aperture/f-number
配置光圈/f值设置,同时注意 depth of focus。
- Exposure Time(曝光时间)
通过增加曝光时间来补偿增益和光圈参数值的降低。
如果您不知道如何手动配置设置,请通过以下教程学习 调整合适的曝光以获取好的点云。或者从使用 Assisted Mode(辅助模式) 开始,然后根据上述建议和 曝光stops列表 微调采集设置。
- 过滤器
- Noise Filter(噪声过滤器)
根据应用需求微调阈值。 您可以设置一个较大的阈值来仅保留高置信度的点。但是如果无法获取足够多的点时,请将阈值设置为较低的数值以获取更多的点,当点云中有很多来自环境光的噪声时,这是有必要的。
- Gaussian Smoothing(高斯平滑)
如果您的应用不要求高精度的点,而仅要求光滑的表面,请使用高斯平滑来抑制噪点并将像素与网格对齐。
- HDR
以相似或相同的曝光进行HDR采集以改善SNR。阅读更多有 关 平均技术 的信息。
- 物理设置
将相机移动至距离场景更近位置。 投影仪的发光功率是有限的, 而场景的光照度取决于投影仪离场景的距离。 距离越近,信号越强,而来自环境光的噪声保持不变。
超越
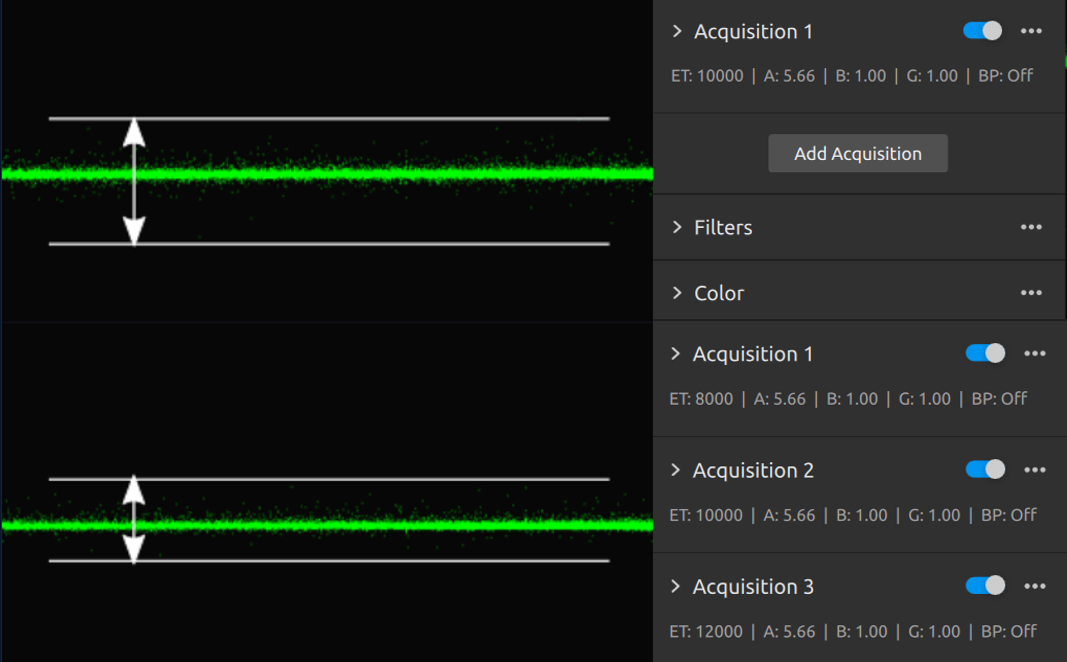
为了展示如何通过2D图像来观察环境光如何以及在多大程度上影响场景,我们将演示一个实验。

我们在相机前方放置了一个打开了手电筒功能的智能手机。 然后,我们将投影仪亮度设置为最大值(亮度=1.8),在其开启的情况下拍摄图像。我们同时对其余的曝光设置参数进行了相应的调整,以获取高强度的图像,同时尽可能避免过饱和。 生成的图像显示手电筒似乎是场景中除投影仪之外的唯一光源。
然后,我们捕获了同一场景的另一幅图像,但是这次关闭了投影仪(亮度=0)。为了补偿损失的曝光,我们将增益设置为最大值(16.0)。如果向下滚动查看当前的图像,您将看到该图像中有另一个光源! 此光源主要影响图像的右下角,并向中心扩散。

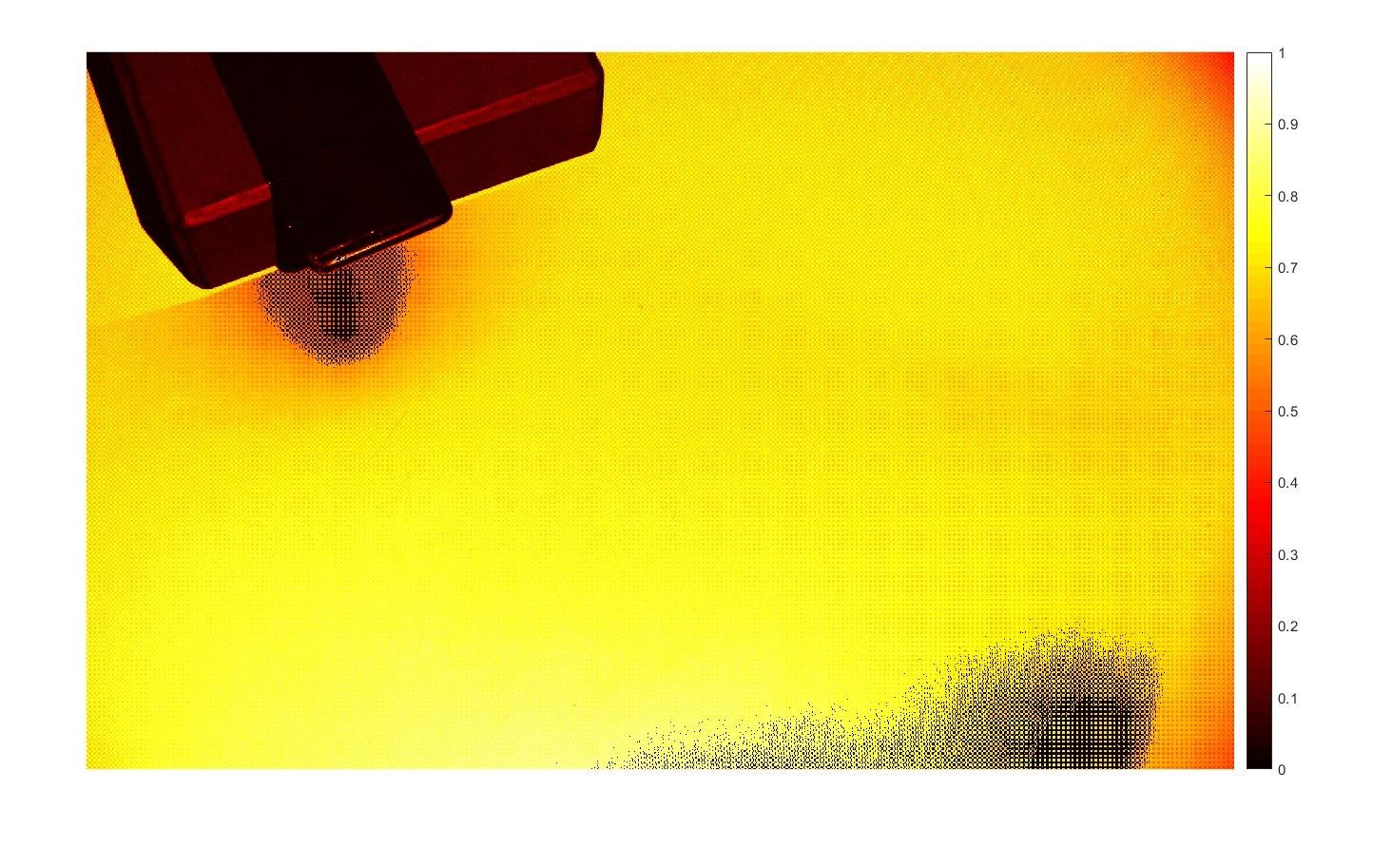
该实验展示了如何使用2D图像作为查看环境光和测量其对场景的影响的一件工具。 如何使用这些信息取决于您自己。
您还可以分析 SNR图像 以获取有关环境光及其对场景影响的更多信息。下图是归一化 (0-1) SNR 图像。在图像中环境光影响较大的区域,SNR 较低。但是,这也取决于材料的光学特性,这就是它在深色智能手机上的数值更低的原因。
进一步阅读
继续查看下一个主题: 拆垛 - 远距离成像。