调整过滤器
介绍
在如 调整合适的曝光以获取好的点云 所描述的那样调整好曝光值和图像帧之后,下一步应该调整过滤器了。有关过滤器的更多信息可查看: Processing(处理)设置。
反射过滤器
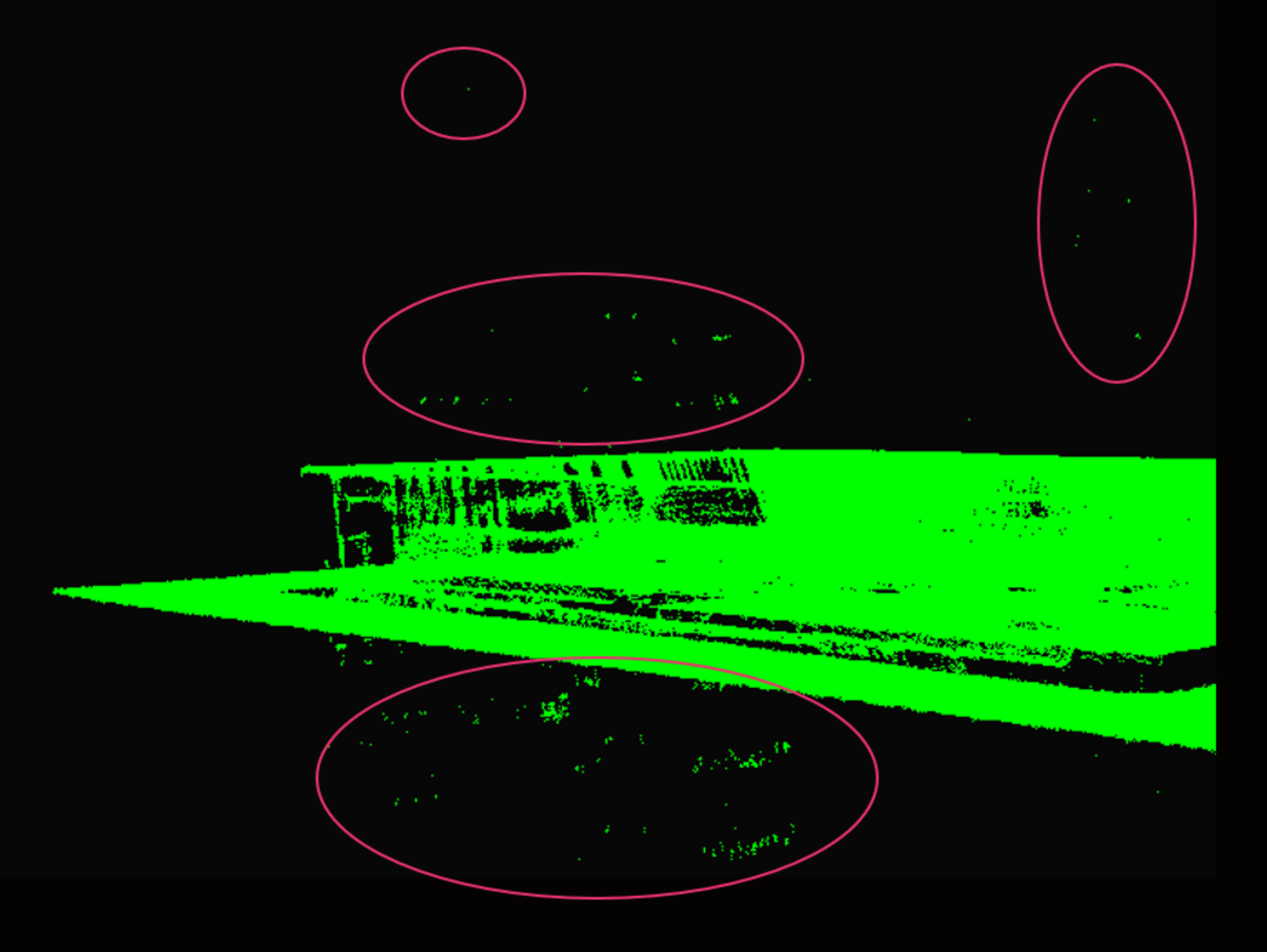
反射过滤器将移除Zivid认为受到反射影响而产生的错误的点。这些通常在点云中被视为"幽灵平面"——漂浮在半空中的不应该存在的小点区域。
备注
启用反射过滤器后,每次采集会增加一定的处理时间,详见下文。
建议使用以下设定值:
数值 |
条件 |
|
如果场景中没有反射现象,并且您想优化采集时间。 |
|
如果您在检测反光部件或置于光反射性容器内的部件时遇到问题,请打开该过滤器。 |

模式 |
优点 |
|
|
|
|
|
|
|
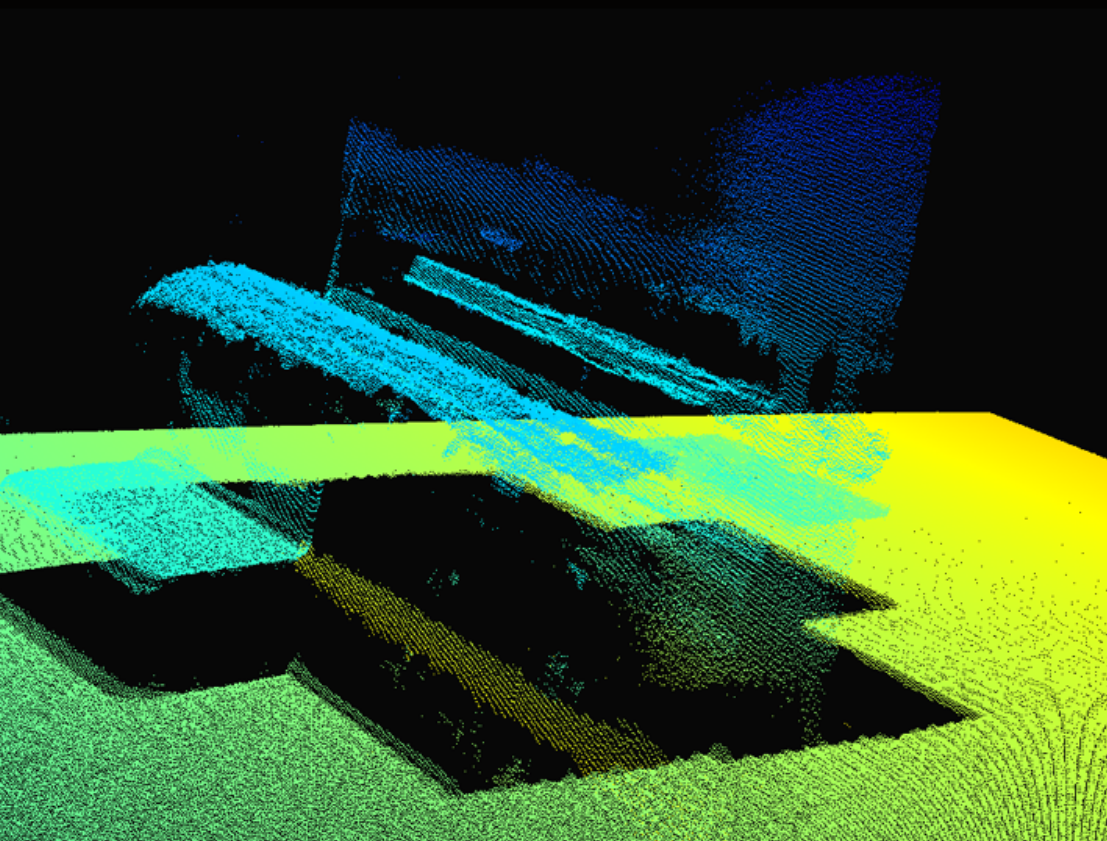
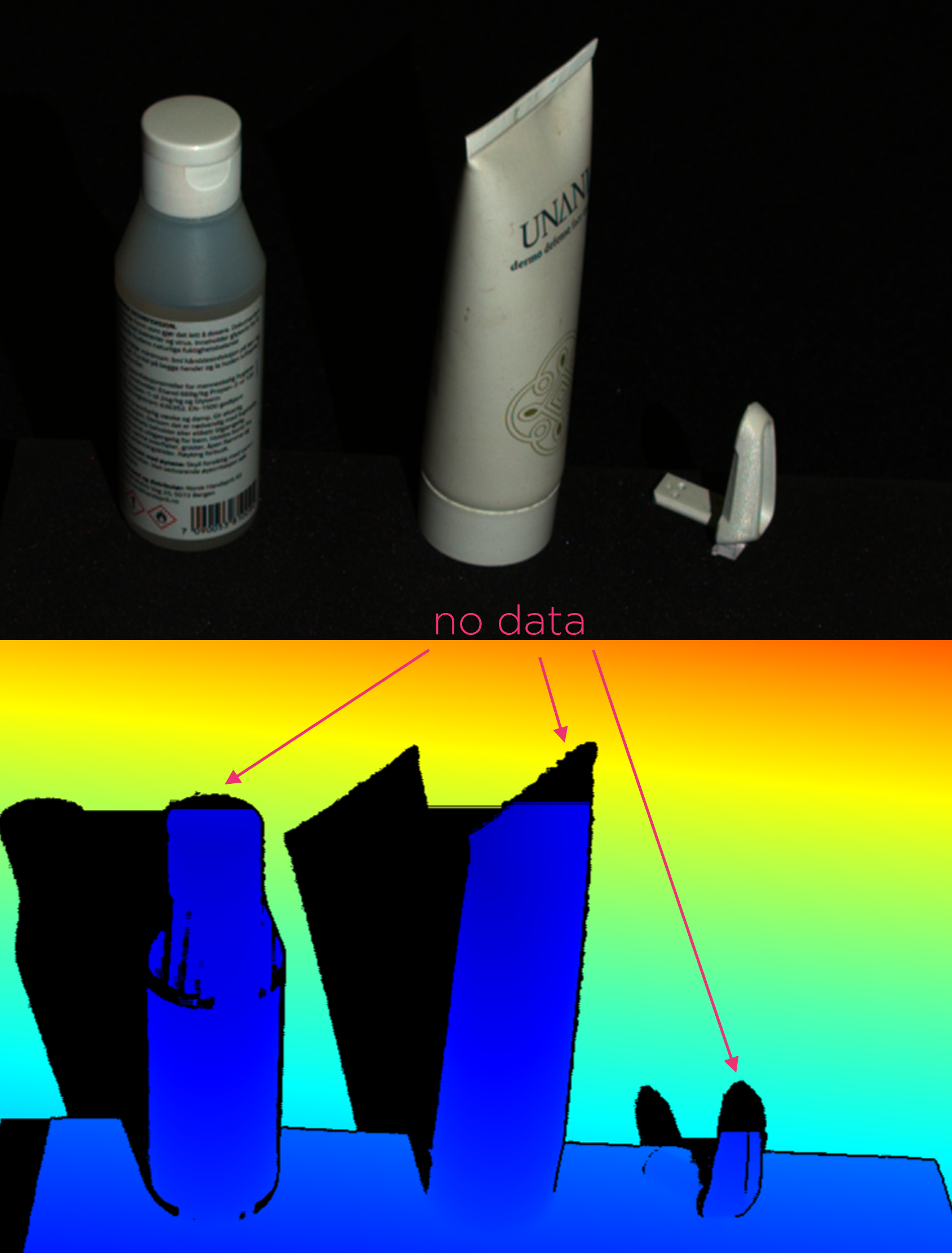
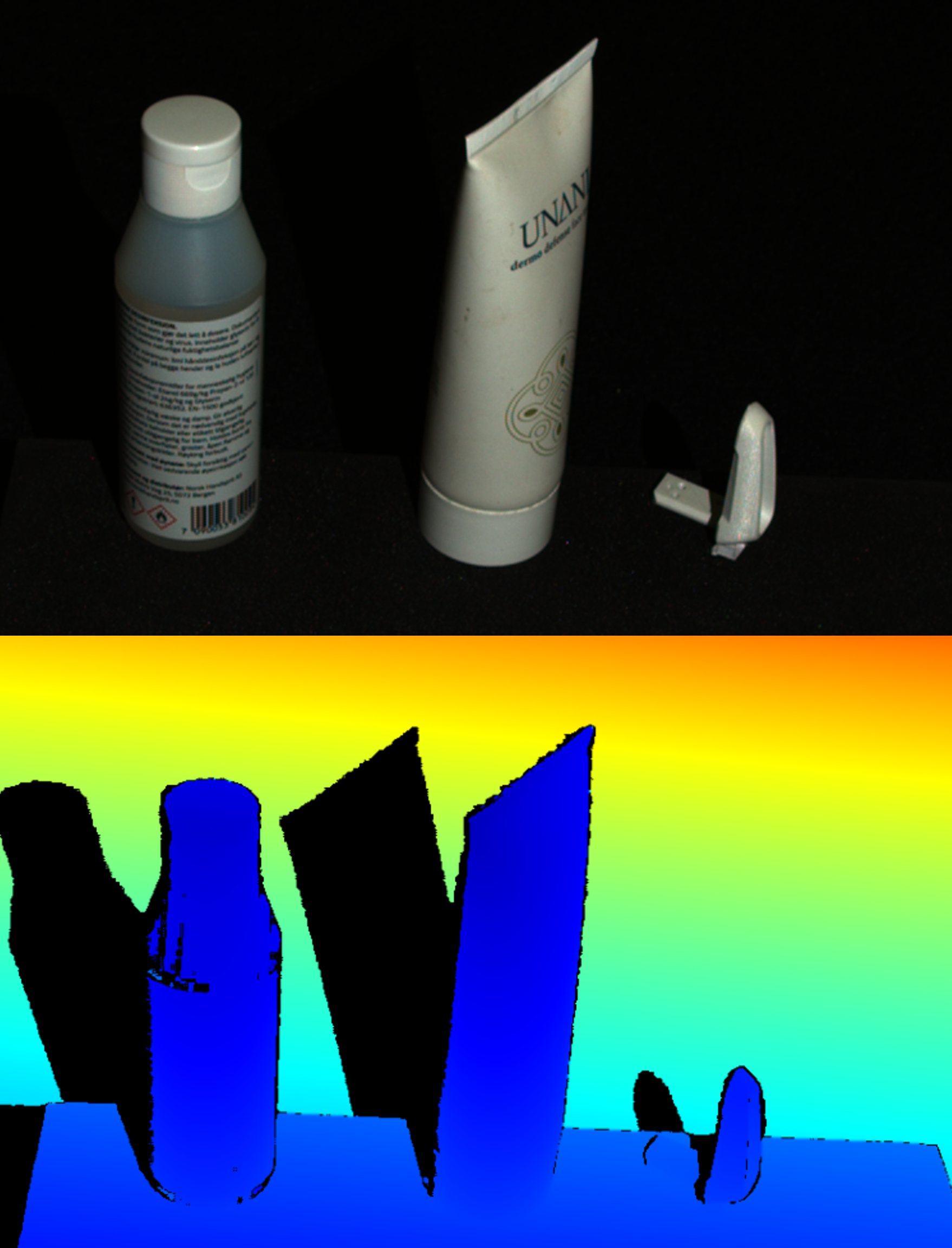
Reflection Filter disabled (ghost plane) |
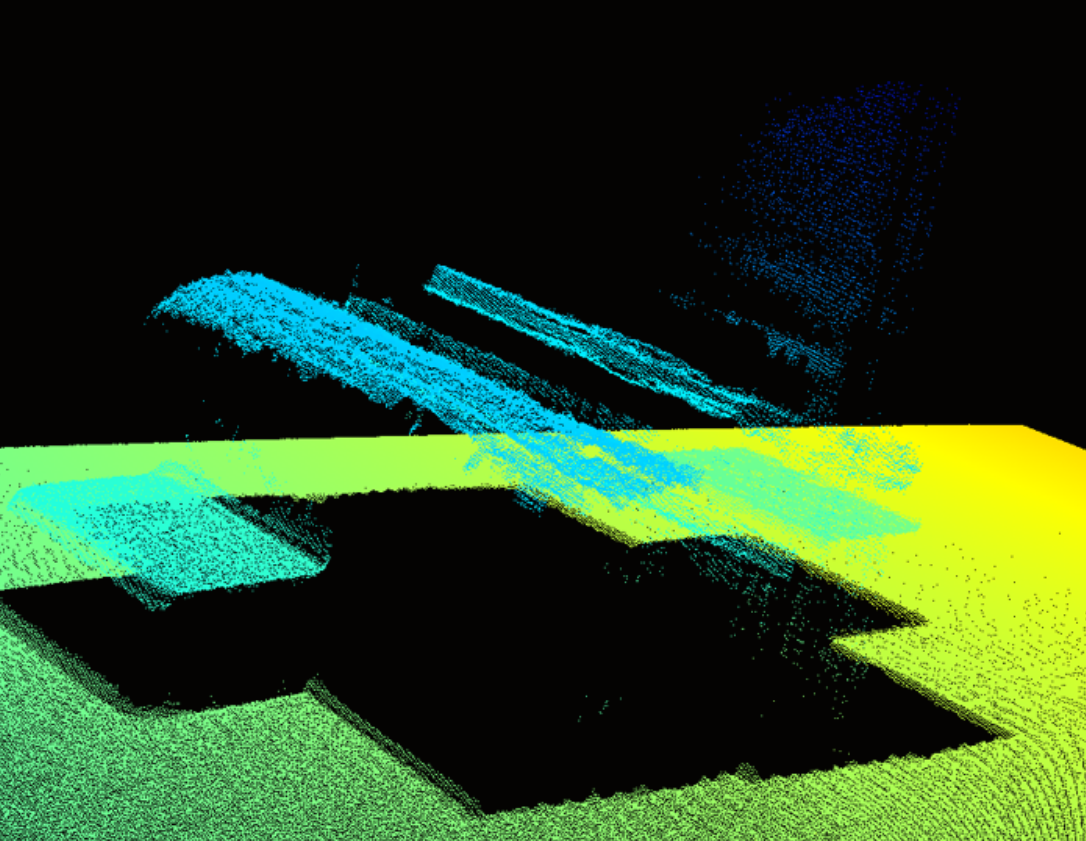
Reflection Filter enabled - Global mode (smaller ghost plane) |
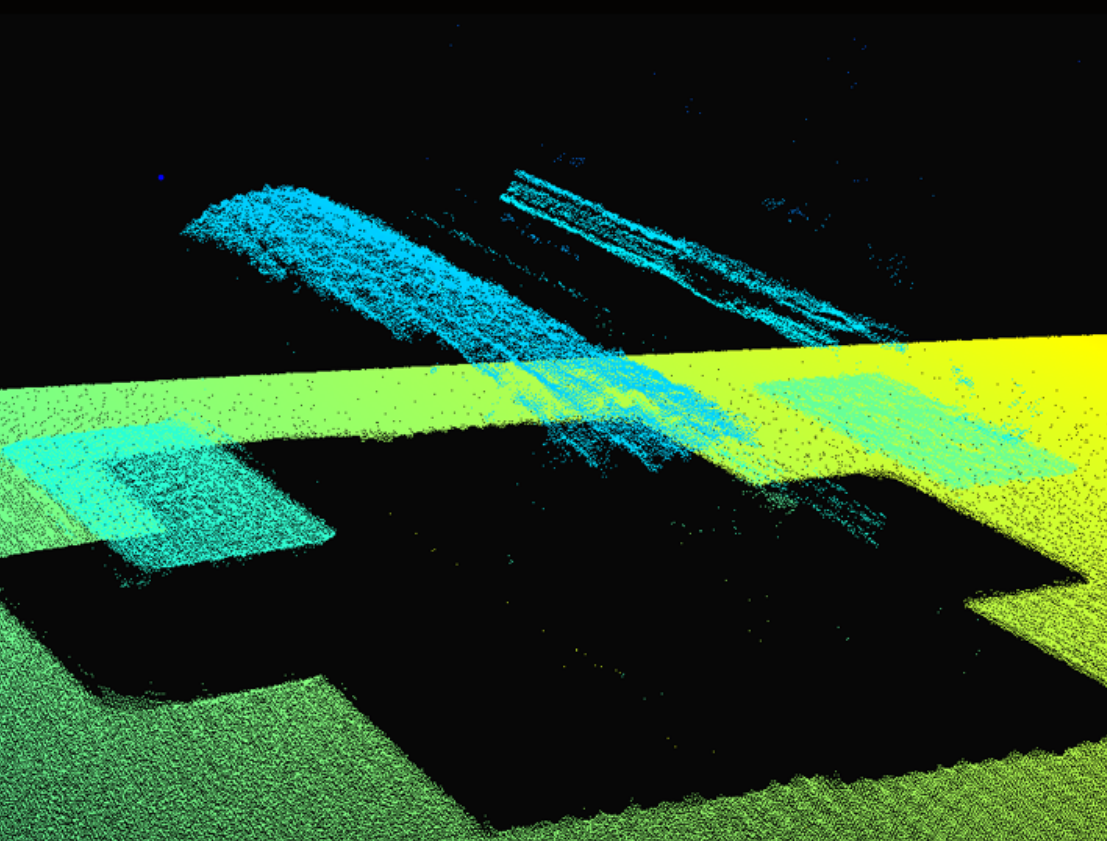
Reflection Filter enabled - Local mode (no ghost plane) |
|
|
Reflection Filter - Global mode (no data on thin objects) |
Reflection Filter - Local mode (data preserved on thin objects) |
|
|
Reflection Filter - Global mode (no data on pointy objects) |
Reflection Filter - Local mode (data preserved on pointy objects) |
|
|
Reflection Filter - Global mode (less outliers) |
Reflection Filter - Local mode (more outliers) |
备注
反射过滤器(Global mode) 在每次3D捕获中将增加以下处理时间:
过滤器 |
Zivid One+ |
Zivid Two |
||||
|---|---|---|---|---|---|---|
Intel UHD 750 |
Intel UHD G1 |
NVIDIA 3070 |
Intel UHD 750 |
Intel UHD G1 |
NVIDIA 3070 |
|
High-end [1] |
Low-end [2] |
High-end [3] |
High-end [1] |
Low-end [2] |
High-end [3] |
|
反射 |
25 (±2) ms |
25 (±3) ms |
12 (±0.8) ms |
21 (±1) ms |
29 (±395) ms |
14 (±1) ms |
Noise filter(噪声过滤器)
噪声滤波器会移除SNR值低于设定阈值的像素。 这可用于消除噪声点(例如,由于环境光而引起的噪声)。
数值 |
条件 |
7 |
“几乎总是” |
5-6 |
为了在以下场景中获得点数据,可能需要保持较低的噪声过滤器阈值:
|
备注
SNR过滤器几乎不会增加额外的处理时间。
Gaussian smoothing(高斯平滑)
高斯平滑会对较小局部区域内的像素进行平均处理。这可用于抑制稀疏噪声和对齐网格上的像素。阈值越大,平滑处理程度更大。高斯平滑还会修正离群值,因此可以提供良好的噪声覆盖范围的权衡。
数值 |
条件 |
<1.0 |
如果您想保留尽可能多的细节和特征。拍摄小型物体时建议使用该设置(亚厘米级特征)。 |
1.5 |
适用于大多数条件和中型尺寸的物体。 |
2.5-5 |
如果您关注更平滑和更大的表面,例如平面的平面度。 |
备注
高斯过滤器在每次3D捕获中将增加以下处理时间:
过滤器 |
Zivid One+ |
Zivid Two |
||||
|---|---|---|---|---|---|---|
Intel UHD 750 |
Intel UHD G1 |
NVIDIA 3070 |
Intel UHD 750 |
Intel UHD G1 |
NVIDIA 3070 |
|
High-end [4] |
Low-end [5] |
High-end [6] |
High-end [4] |
Low-end [5] |
High-end [6] |
|
平滑 |
31 (±2) 毫秒 |
63 (±3) ms |
2 (±0.6) ms |
18 (±1) ms |
34 (±433) ms |
1 (±0.9) ms |
离群值过滤器
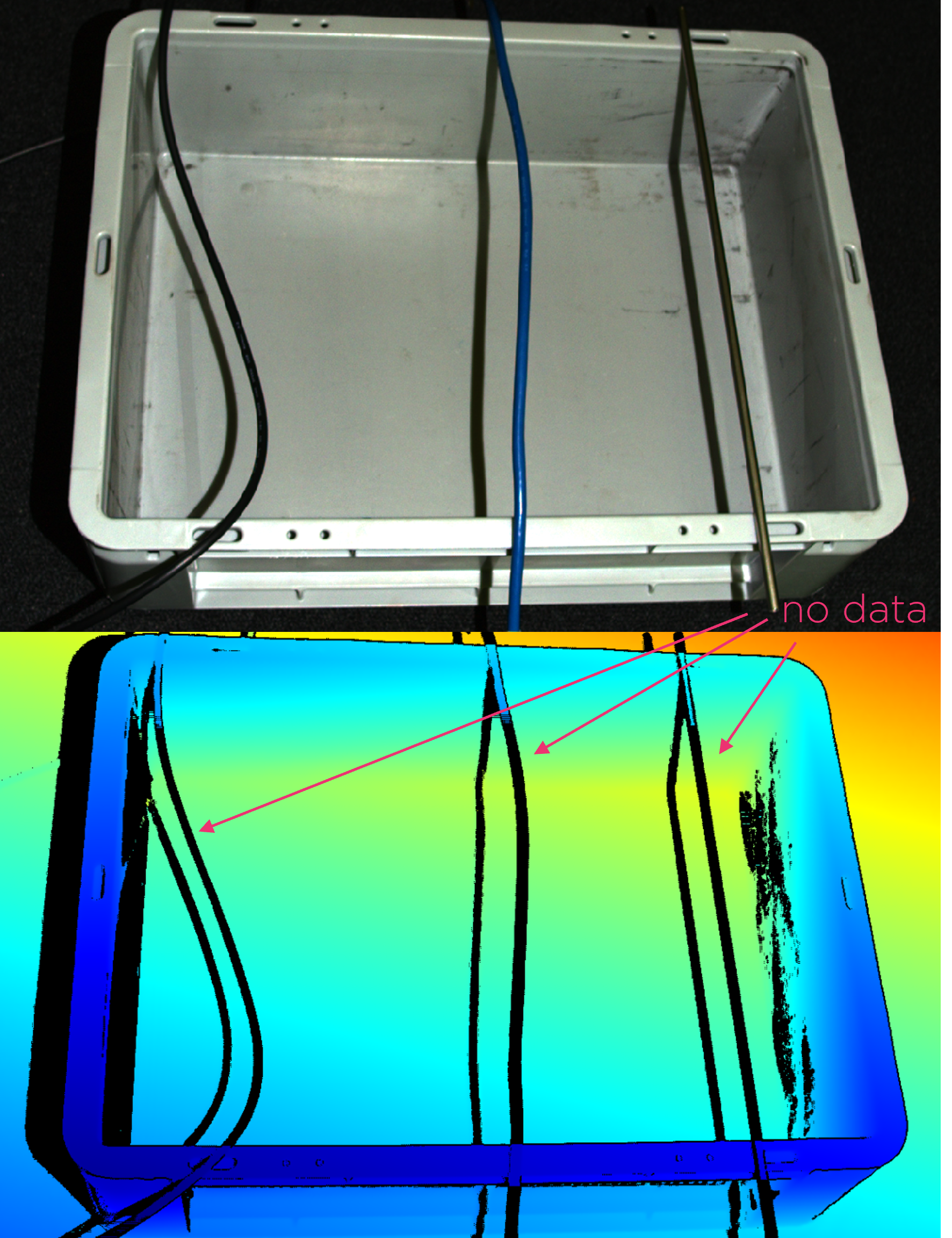
离群值过滤器会移除它认为是相邻像素的小局部区域内的离群值的像素点。 离群值是通过它们和其最近的点有多远来衡量的。 如果距离超过离群值过滤器的阈值,则将该像素识别为离群值,并从最终点云中将其移除。 离群过滤器阈值的单位为毫米,阈值越小,移除的像素越多。 建议从较大的阈值开始调试,然后不断减小阈值,直到对密度/噪声水平满意为止。
值(mm) |
条件 |
2-10 |
适用于Zivid Two的典型值 |
1-3 |
适用于Zivid One+ Small的典型值 |
3-10 |
适用于Zivid One+ Medium的典型值 |
10-30 |
适用于Zivid One+ Large的典型值 |
50-100 |
在以下情况可考虑该设置:
|
OFF |
如果场景具有*极端*噪声,但只想要您想要获得任何能够获取的点,那么可以关闭过滤器。这可能是在非常黑暗的场景中,非常远(> 2m)或户外。 |
备注
离群值过滤器的单位是毫米
备注
离群值过滤器几乎不会增加额外的处理时间。
对比度失真过滤器
对比度失真过滤器可修正和/或移除受相机镜头模糊影响的点。 在点云中,这通常发生在具有高对比度(强镜面反射)的区域以及具有大纹理梯度的区域。关于这类伪像的详细说明,请查看 对比度失真伪像。
过滤器参数strength(强度)表示在3D空间中修正一个点的程度,threshold(阈值)表示在移除某个点之前(如果启用了移除模式)的最大距离。 由于强度和移除效果取决于相机的焦点和物体的方向(相对于相机基线),因此建议在调整对比度失真过滤器参数之前先调整曝光设置 Contrast Distortion Filter(对比度失真过滤器) 参数。
警告
如果 strength 值非常高,可能会过度补偿修正。
数值 |
条件 |
0.1-0.2 |
如果对比度失真现象不严重,则仅需要进行少量修正。 |
0.3-0.5 |
“几乎总是” ,如果相机对焦良好,但存在对比度失真。只需要进行一些修正。 |
0.6-0.7 |
“常见情况”,如果点云受较大的对比度失真影响,可能是相机有一些失焦。 |
0.8-1.0 |
“不常见的情况” ,如果有非常严重的对比度失真现象, 这通常表明相机失焦! |
备注
对比度失真过滤器在每次3D捕获将增加以下处理时间:
过滤器 |
Zivid One+ |
Zivid Two |
||||
|---|---|---|---|---|---|---|
Intel UHD 750 |
Intel UHD G1 |
NVIDIA 3070 |
Intel UHD 750 |
Intel UHD G1 |
NVIDIA 3070 |
|
High-end [7] |
Low-end [8] |
High-end [9] |
High-end [7] |
Low-end [8] |
High-end [9] |
|
Contrast Distortion Correction(对比度失真校正) |
57 (±2) 毫秒 |
96 (±2) ms |
7 (±0.6) ms |
58 (±1) ms |
99 (±410) ms |
7 (±0.8) ms |
Contrast Distortion Removal(对比度失真移除) |
40 (±2) 毫秒 |
60 (±3) 毫秒 |
4 (±0.6) ms |
41 (±1) ms |
61 (±435) ms |
5 (±0.9) ms |
小技巧
如果已启用对比度失真修正过滤器,则对比度失真移除过滤器增加的处理时间可以忽略不计。
在调整对比度失真过滤器之前调整光圈
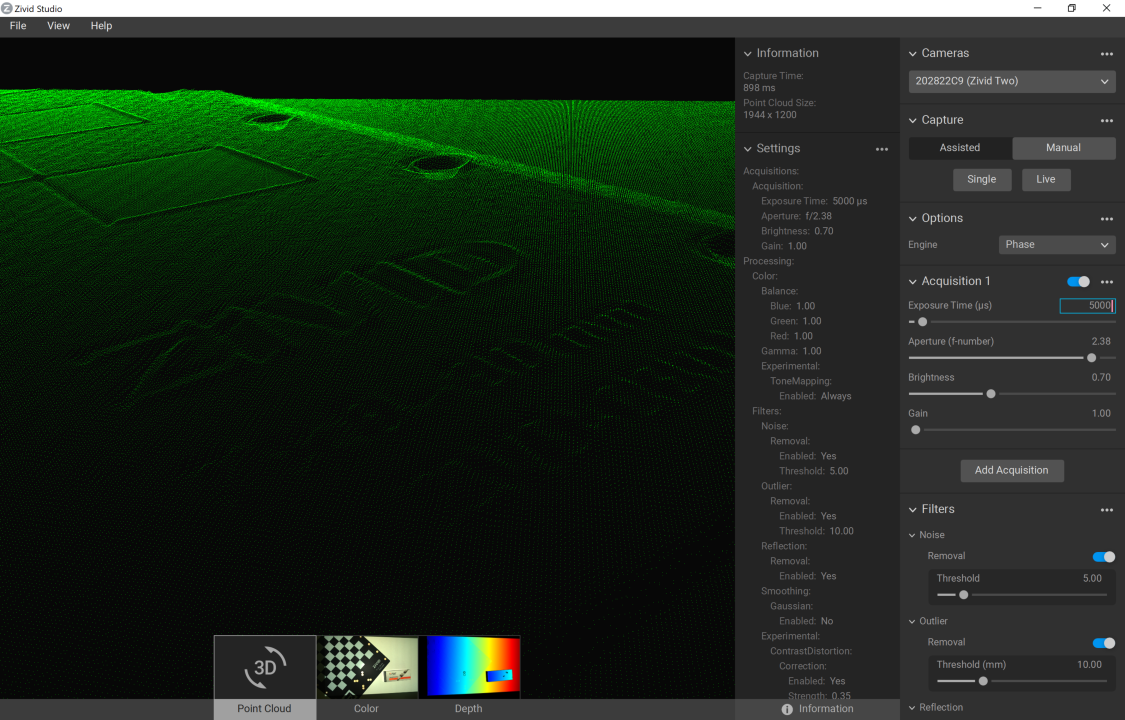
调整对比度失真过滤器有时不足以消除对比度失真伪像。当彩色图像模糊时,伪像会变得更糟。因此,在调整过滤器之前,通过调整光圈来确保彩色图像清晰对焦是非常重要的。
我们将通过一个示例来演示如何通过调整Aperture(光圈)来消除对比度失真伪像的过程。
下图显示了失焦的彩色图像和带有可见对比度失真伪像的点云。彩色图像模糊,因为光圈使用了较低的f-值 (2.38)。设置的Contrast Distortion strength(对比度失真强度)为0.35。
|
Color image out of focus |
|
Resulting point cloud with contrast distortion |

将Aperture(光圈)从2.0更改为8.0,以消除对比度失真伪像,并通过更长的曝光时间来补偿这种变化。得到的结果是一个聚焦的彩色图像和一个没有任何对比度失真伪像的点云,如下图所示。
|
Color image in focus |
|
Resulting point cloud without contrast distortion |

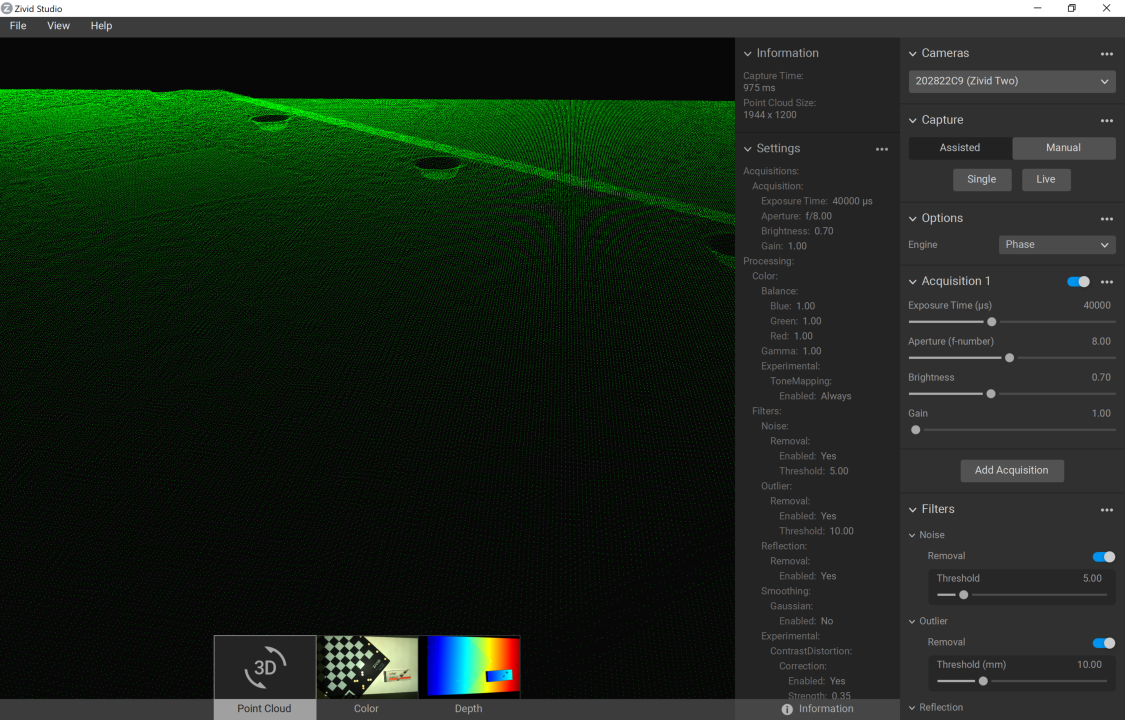
此示例中使用的点云可供下载以供进一步观察:
进一步阅读
继续查看 优化彩色图像。