工作距离和相机定位
介绍
在本教程中,我们将学习如何针对给定的应用正确地安装相机。 我们将介绍不同的考虑因素,例如视野(FOV),工作距离和图像光晕问题。
找到合适的工作距离
在许多应用中,相机是固定安装的,以固定的FOV来捕获点云。 在某些应用中,可以将相机安装在机械臂上,安装在机器人上的相机在如何通过调整相机拍摄位置来捕获良好的点云方面提供了更多的自由。对于这两种备选方案,仍然需要对相机调整定位,以便针对给定场景进行光学优化。
在确认正确的工作距离时,需要考虑以下几点:
相机需要观测的面积或体积是多少?
工作区域或体积所需的空间分辨率和精度是多少?
给定的视野是否在Zivid相机的工作范围内?
一旦我们知道了想要成像的区域,我们可以通过以下方式检查它是否满足相机的推荐工作距离以及我们算法的要求:
使用我们的 3D camera product selector (3D 相机产品选择器)
使用FOV计算器: 计算FOV和成像距离。计算器将估算出相机到场景的距离、FOV、空间分辨率和精度之间的关系。
使用数据表。
通过捕获和检查点云(比如使用Zivid Studio)进行手动验证 。
备注
在数据表和FOV计算器中,我们可以找到有关Zivid相机点精度和空间分辨率随工作距离变化的信息。
警告
请注意,噪声与工作距离成正比,而空间分辨率与工作距离成反比。
如果某个相机位置可以满足工作距离,FOV,分辨率和精度的全部要求,我们可以继续进行下一步。 如果不行,我们需要考虑是否使用机器人安装,多台相机拍摄等其它方案。 在这种情况下,我们建议您联系 customersuccess@zivid.com, 我们将帮助您找到解决方案。
调整相机角度
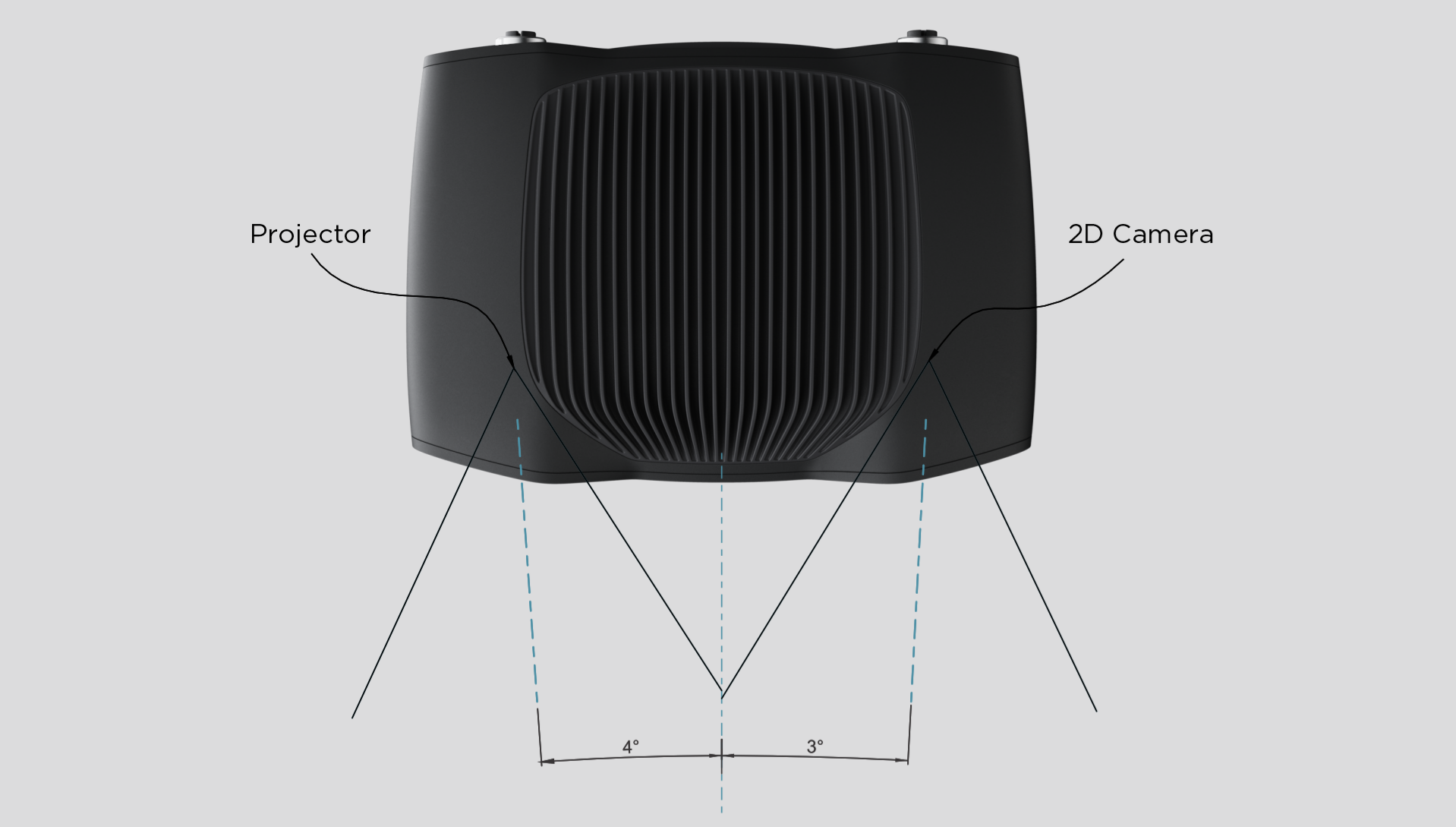
Zivid相机内部的成像传感器在方位角方向(y轴)以微小的的平移角偏移。如果希望相机垂直于场景,则需要考虑这一点。
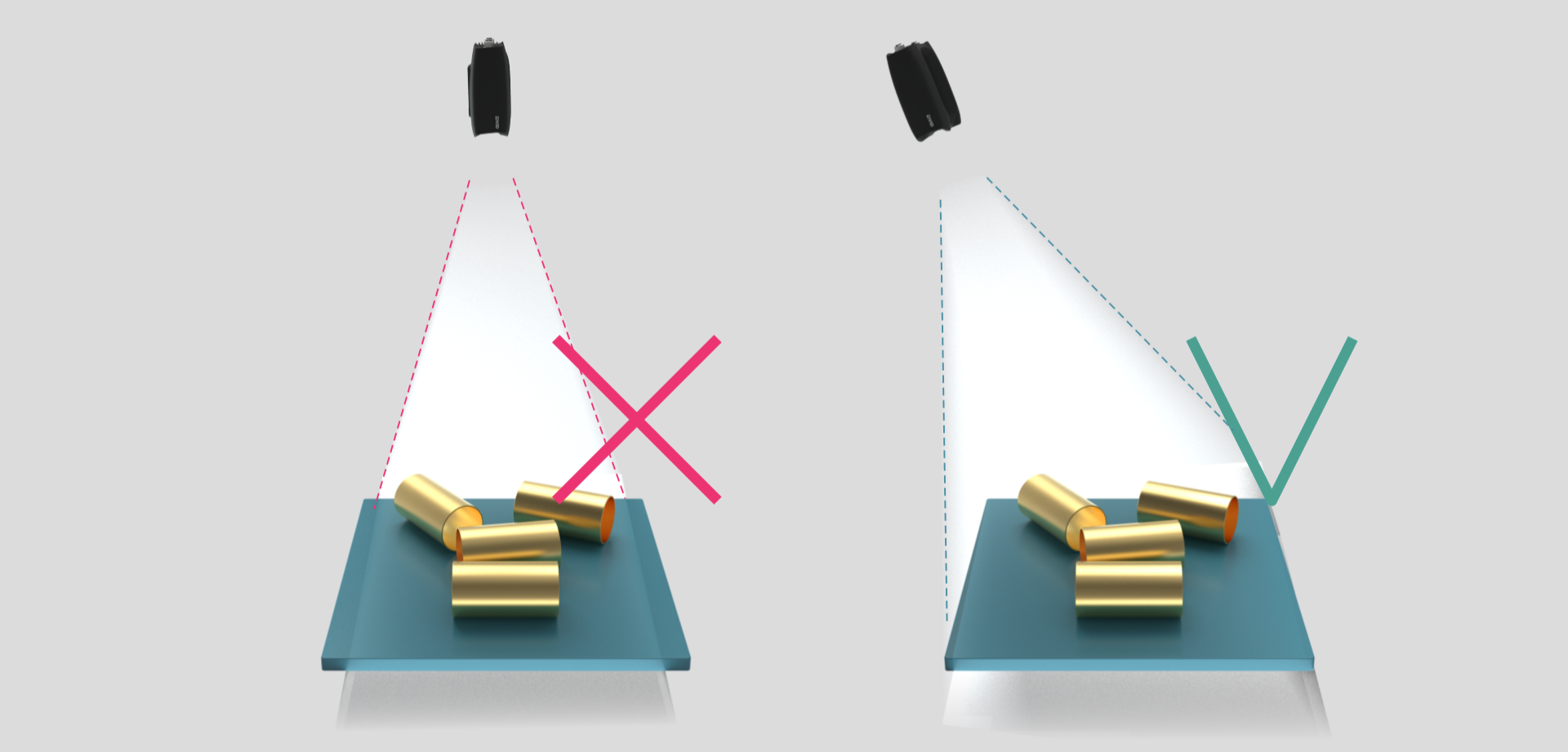
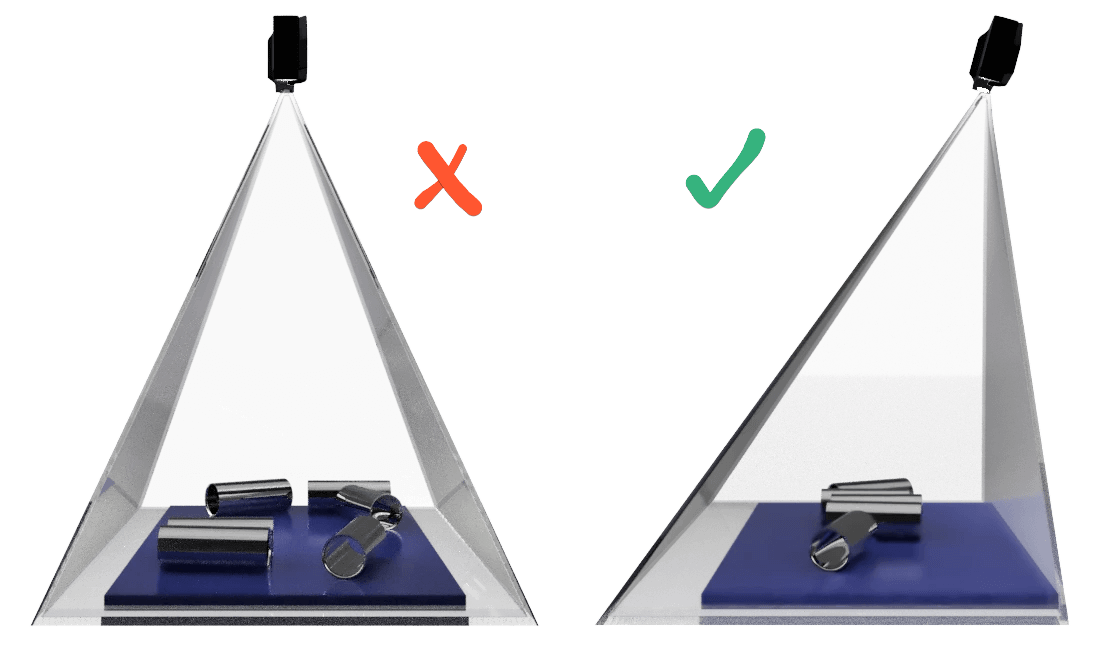
尽管将相机垂直于场景安装可能是最直观的方法,但这并不是最佳方法。 如果可能的话,请以微小的倾斜角度安装相机,以避免来自背景反射,如 光晕 - 点云中的亮点 中所描述的那样。这也释放了场景上方的空间,以便于工具和机器人的进入。请查看可用的 Zivid安装支架。
备注
如果场景中有镜面目标,则更有必要将相机倾斜安装。
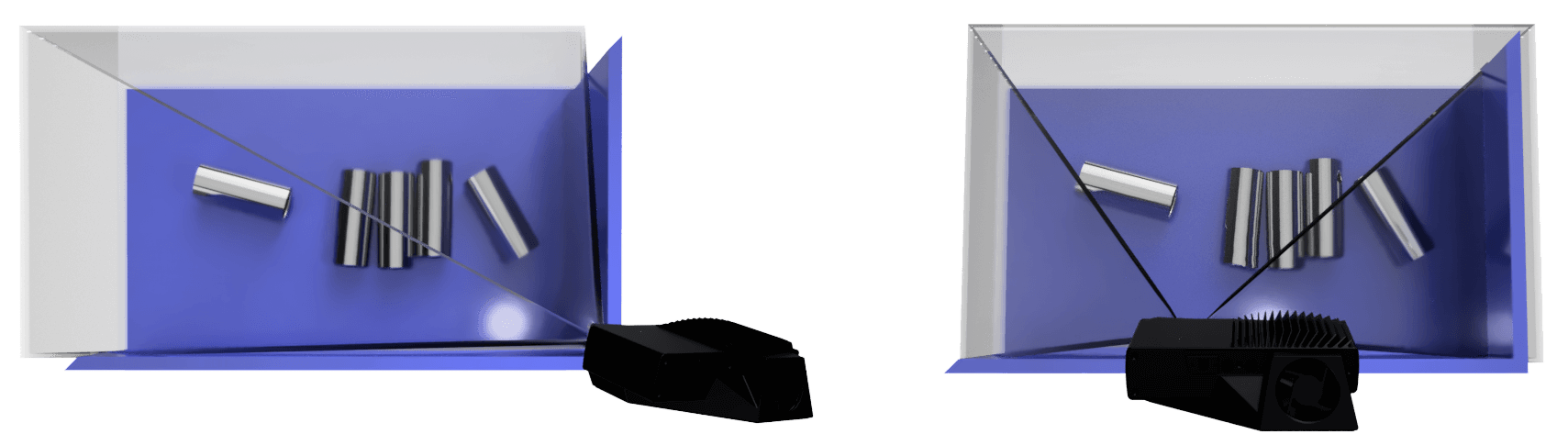
在料箱抓取(bin-picking)的应用中
对于料箱抓取应用,请将Zivid相机投影仪放置在料箱的后边缘上方或后角上方(参见下图)。 平移并倾斜它,以使2D相机正对着料箱的中心。 投影仪的光线不应落在靠近投影仪的两面侧壁的内表面上, 它们应该几乎平行于这两面侧壁。 以这种方式安装相机可最大程度地减少料箱内壁之间的相互反射。
找到合适的焦深
Zivid相机具有非常强的抗散焦能力,但是如果要最大程度地提高点云的精度,仍应考虑焦深。 仅在点云处理算法需要调整合适焦深才能成功运行时,才需要执行此步骤。
警告
较低程度的聚焦会降低精度并增强 对比度失真。
通过查 看 焦深 中的表格,找到我们应该用于给定工作距离的推荐的最大光圈(推荐最小f-值)。或者通过选择相机型号并输入最近和最远的工作距离来使用 焦深计算器 。建议将”可接受的模糊半径(像素)”( “Acceptable blur radius (pixels)”)设置为2。
进一步阅读
确认合适的工作距离后,下一步将需要确认正确的相机设置。 我们将 在 调整合适的曝光以获取好的点云 中介绍这一点。