系统配置
当涉及到视觉引导机器人系统中的相机安装位置时,有两种不同的标准配置,”eye-to-hand”和”eye-in-hand”。
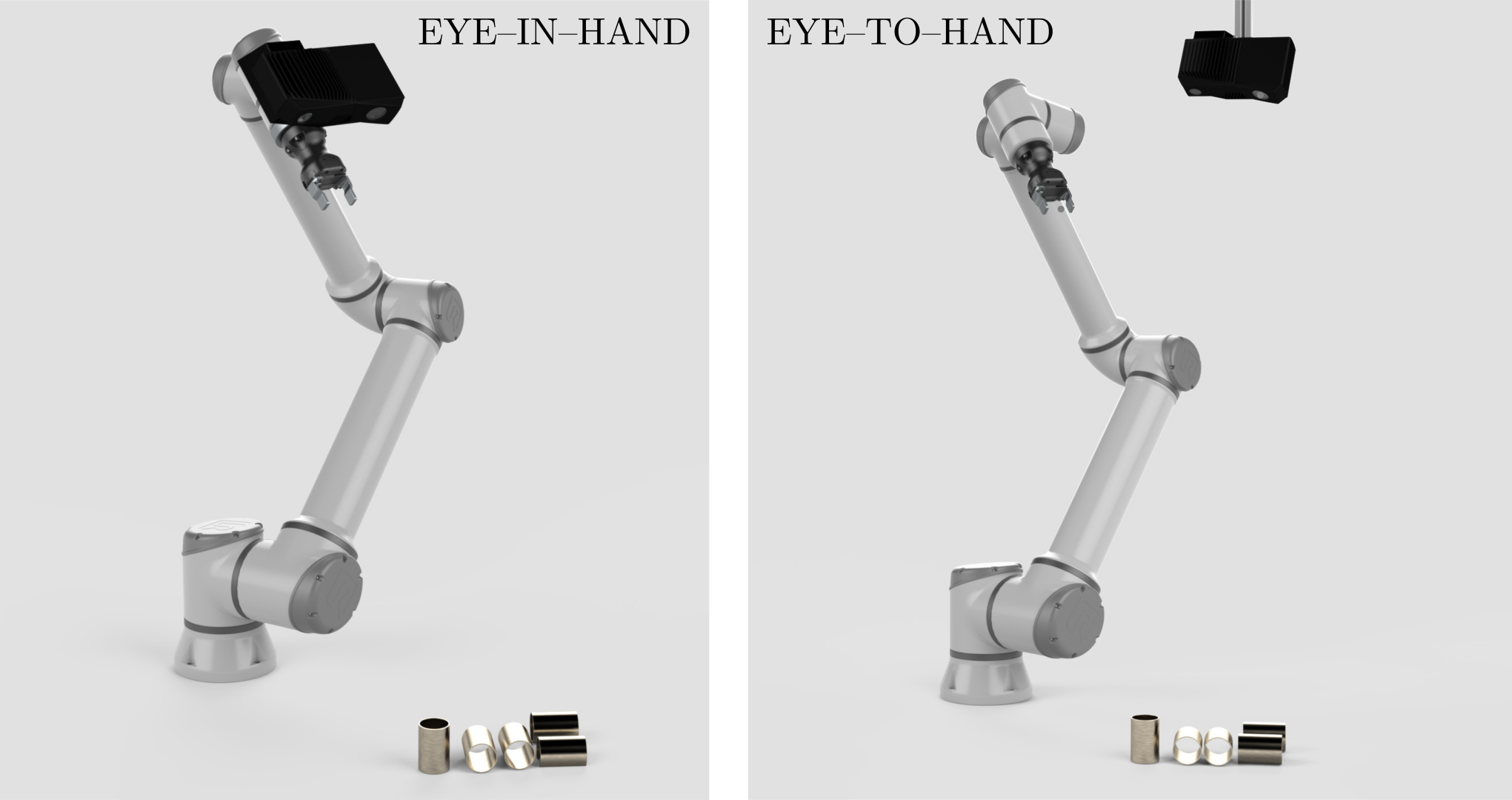
Eye-to-hand
这种配置的系统在机器人单元中有一个固定安装的相机,用于观察机器人的工作空间。
该系统配置的优点是由于相机距离机器人的拾取工作区域相对较远,因此机器人不太可能与之发生碰撞。该系统配置的另一个好处是,可以在机器人移动的同时执行图像采集,这意味着可能会缩短循环时间。
该系统配置的缺点是可能会由于机器人在物体和相机之间移动导致遮挡了相机的视线,这会对循环时间产生负面影响,为了避免这种情况的发生,可应用智能运动规划技术将机器人运动与图像采集进行协调,而这并非易事。该系统的灵活性也较差,因为相机是固定安装的,且具有恒定的视点,这意味着无法改变FOV,并且无法在有需要的时候提高图像测量的准确性。最后,由于需要设计和安装一个稳固的用于安装相机的机械结构,在部署机器人单元方面需要完成更多额外的工作。
Eye-in-hand
此配置是将相机稳固地安装在机器人的末端执行器上,并跟随机器人一起移动。最常见的安装方式是将相机固定在工具法兰或工具上。
该系统的优势在于其灵活性。如果需要更大的FOV,则机器人可以向后移动到较远处进行拍照。从多个视角对对象进行成像可以实现更完整的3D模型(比如一个完整的360度模型)。它还可以改变相机的视角来从不同的角度进行拍摄,这也有助于缓解镜面反射的问题,因为当视角发生改变时,镜面反射通常会出现在不同的区域。该系统配置的另一个优点是没有潜在的物体被机器人遮挡的问题。
这种配置的一个缺点是必须通过仔细控制机器人的加速度来避免碰撞。这是为了避免损坏工作环境、相机或机器人。手臂安装的另一个缺点是,当机器人不在可成像的位置时,相机无法用于图像采集,例如,当机器人在交付已拾取的零件时。此外,机器人必须在相机捕获3D图像之前停止移动并保持稳定。最后,相机的重量减少了机器人用于安装夹具和抓取物体的有效负载。
我们在本篇教程介绍了系统配置,接下来我们将确定 手眼标定的问题.