Calibration Object¶
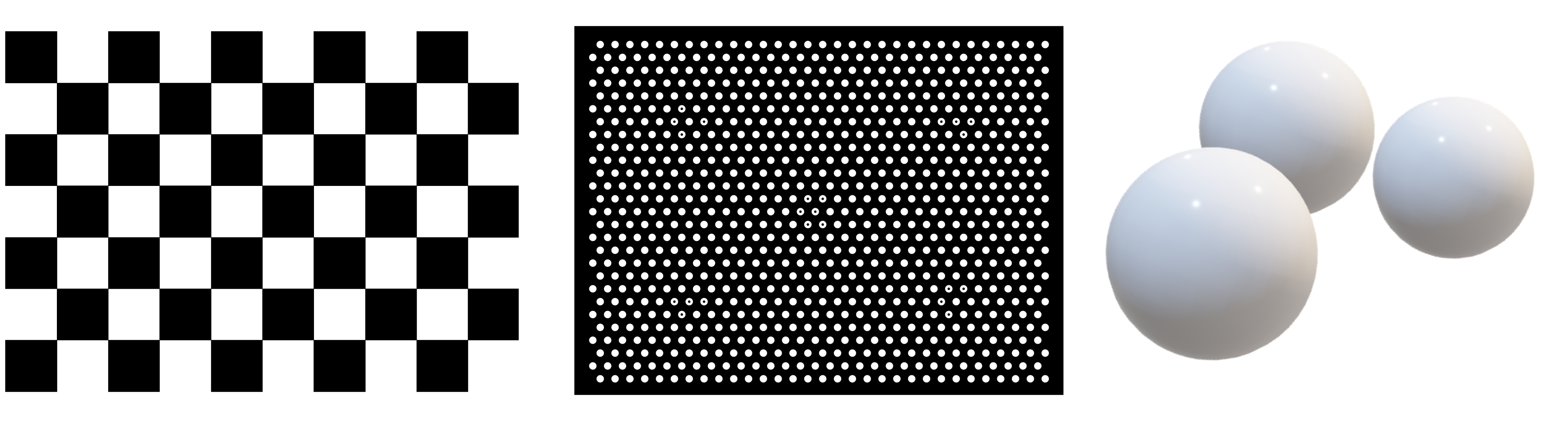
The hand-eye calibration process requires using an object of known geometry that can be detected and localized from the camera image. 2D patterns are most commonly used as calibration objects. OpenCV libraries use a checkerboard, while HALCON software uses a dot pattern. Having a 3D camera enables using a 3D calibration object; an example is spheres.
Zivid uses a checkerboard for the hand-eye calibration. The main Zivid calibration objects can be found on the Zivid WebShop. These boards are also used for camera maintenance with infield correction. Each of these boards has a 7x8 checkerboard made of 30 mm checkers and a fiducial marker in the corner. For these boards to be used in hand-eye calibration, both the checkerboard and fiducial marker need to be detectable in each capture.

If the Zivid calibration object is unavailable, Zivid hand-eye calibration will also function with the 9x6 grey-white Zivid checkerboards. These boards can be printed out with the PDFs provided below.
You can download our grey and white checkerboards in different square sizes in *.pdf format:
10 mm (A4)- Zivid One+ Small20 mm (A4)- Zivid One+ Medium20 mm (A3)- Zivid One+ Medium40 mm (A3)- Zivid One+ Large
We recommend printing the Zivid checkerboards on KAPA or similar board materials with paper-based cover layers.
Continue reading about How To Get Good Quality Data On Zivid Calibration Board.