Zivid Specs Terminology
This page defines the core terminology used at Zivid when discussing 3D measurement performance. These definitions provide a shared vocabulary for communication and apply to every Zivid camera. The examples below are illustrative. For model-specific numbers, consult the relevant Zivid datasheet.
Summary Table
Metric |
What it describes |
|---|---|
Sensor resolution |
Total number of 2D & 3D sampling locations |
Spatial resolution |
Smallest XY feature distinguishable at distance |
Point precision |
Local random noise of a single point (XYZ variation) |
Local planarity precision |
Local surface roughness within a small patch |
Global planarity trueness error |
Systematic bending or warping of large surfaces |
Dimension trueness error |
Systematic scaling error in measured distances |
Accuracy |
Combined trueness and point precision |
Sensor Resolution
Definition: Sensor resolution is the total number of pixels in the 2D image sensor that contribute 3D points to a capture. Each pixel becomes one XYZ sampling location in the point cloud.
Explanation: A Zivid camera with a sensor resolution of 2448 × 2048, for example, produces up to ~5 million 3D points per capture. Each point includes:
RGB color
XYZ position
Signal-to-Noise Ratio (SNR) metadata
Higher sensor resolution increases sampling density and enables finer detail before spatial resolution becomes the limiting factor.
Why it matters
Sensor resolution sets the upper bound on how many 3D points a capture can contain. It influences spatial detail, point density, and downstream tasks such as fine-feature detection and CAD-based matching.
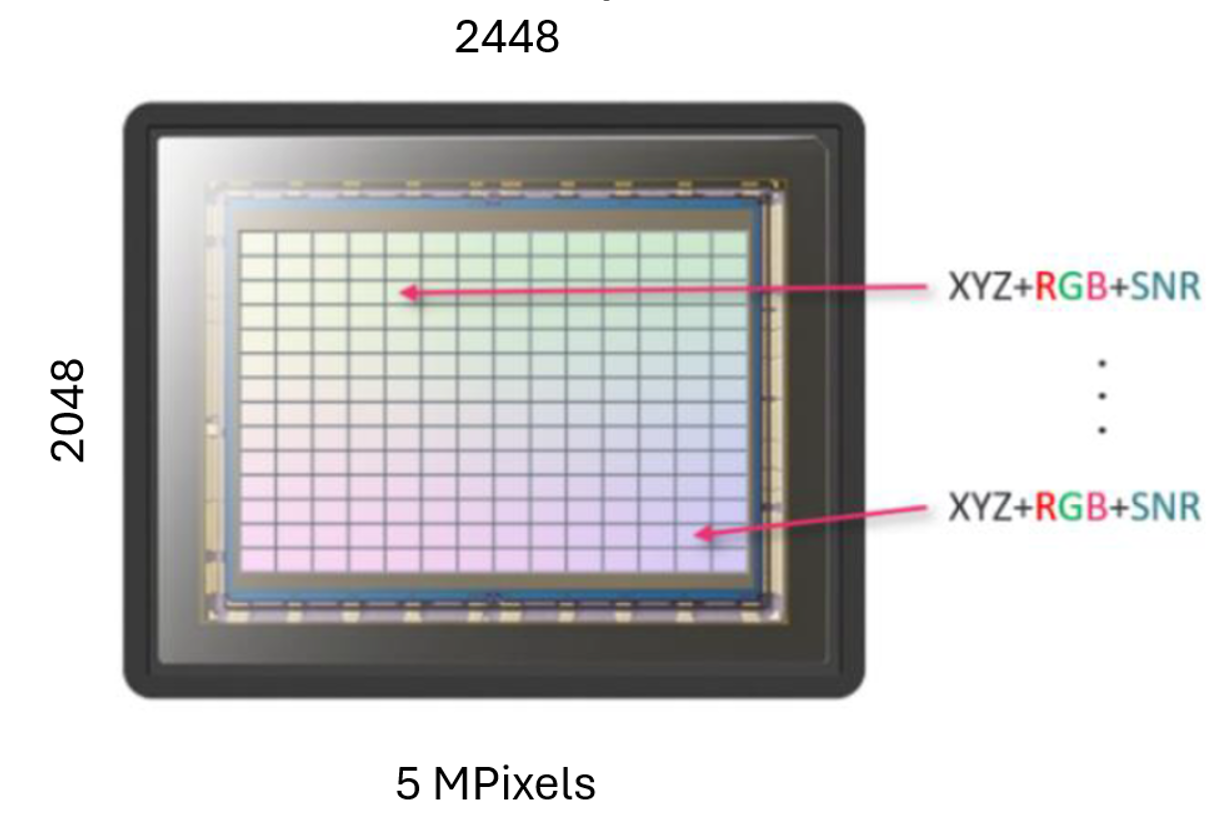
Each pixel on the 2D sensor becomes one 3D measurement.
Capture resolutions in Zivid cameras
Capture resolution |
Zivid 3 |
Zivid 2+ |
Zivid 2 |
|---|---|---|---|
Full resolution |
2816 × 2816 |
2448 × 2048 |
1944 × 1200 |
2x2 subsampled |
1408 × 1408 |
1224 × 1024 |
972 × 600 |
4x4 subsampled |
704 × 704 |
612 × 512 |
Not available |
Spatial Resolution (XY Resolution)
Definition: Spatial resolution is the physical surface area represented by one pixel at a given working distance.
Explanation: Because each pixel corresponds to an expanding cone of light, the further away an object is, the larger the surface area each pixel covers. As distance increases, small features become harder to distinguish.
Spatial resolution depends on:
working distance
sensor resolution
Because spatial resolution scales with sensor resolution, subsampling directly affects it. Subsampling reduces the number of points along the x and y axes, so the spatial distance between two neighboring points increases. For example, 2x2 subsampling halves the number of points along each axis, doubling the spatial distance between two points, and 4x4 subsampling quarters it, quadrupling the distance, at the same working distance.
Why it matters
Spatial resolution sets the smallest XY feature size the camera can resolve at a given distance. It is critical for edge detection, small-part picking, and surface-quality inspection.
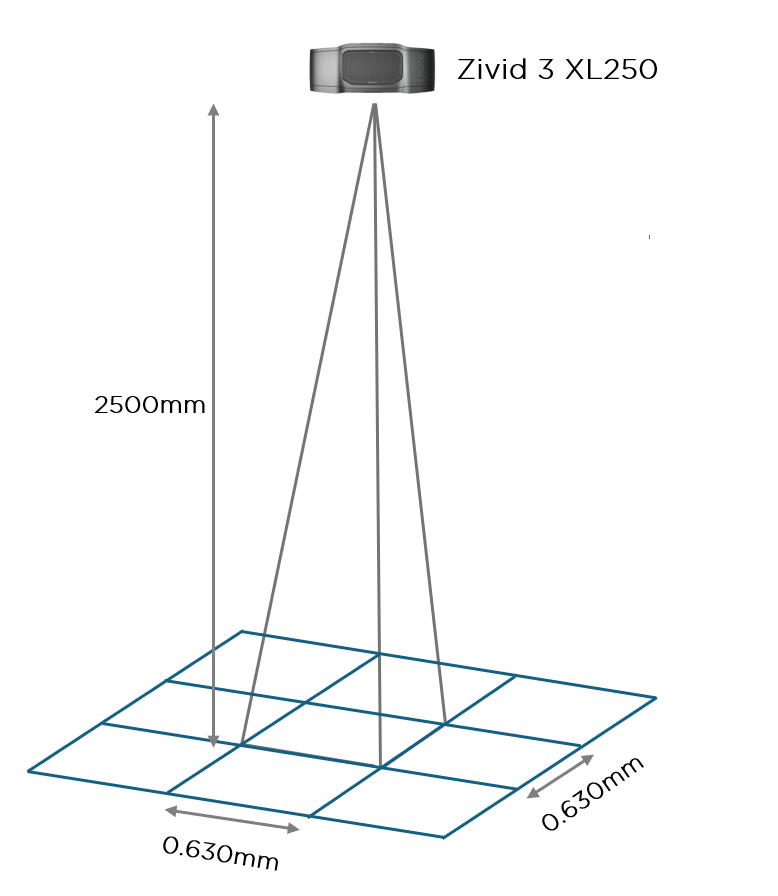
Closer surfaces give a smaller per-pixel footprint; farther surfaces give a larger one.
Example: A 10 × 10 mm feature might be sampled by hundreds of points at close range, but only a handful at long range. Details therefore become less distinguishable with distance.
Depth / Z Resolution (Why Z-Resolution Is Not Used at Zivid)
Definition: There is no universal definition of depth resolution in 3D metrology. The term is often used inconsistently to refer to axial granularity or Z-noise.
Explanation: Zivid does not specify Z-resolution because 3D points are measured in XYZ simultaneously, not along a single axis. The metric that meaningfully captures variation in depth and and across all axes together is point precision.
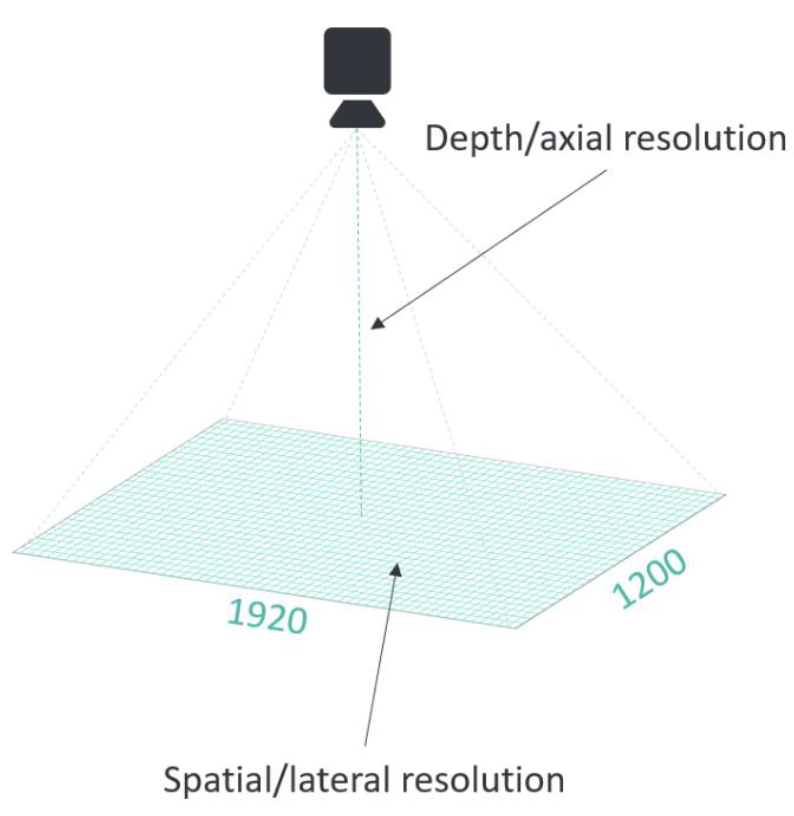
Different interpretations lead to ambiguity; point precision provides a single, unified measure.
Point Precision
Definition: Point precision is the 1σ Euclidean distance variation for a single point between consecutive measurements.
It is found by measuring an individual point’s capture-to-capture variation in space for all points in the point cloud over multiple consecutive measurements.
Explanation: Repeated captures of the same surface produce slightly different 3D positions for each point due to random noise. Point precision is the standard deviation of that variation. A small value means the camera reports nearly the same XYZ for a given point every time.
High point precision:
clean surfaces
consistent measurements
reliable fine-feature detection
important for surface-based and CAD-based matching
Low point precision:
visible surface noise
reduced confidence in edges or small structures
Why it matters
Point precision is the dominant factor in detecting small features and producing clean surfaces. In robotics it directly affects pick success on shiny, dark, or fine-detailed parts.
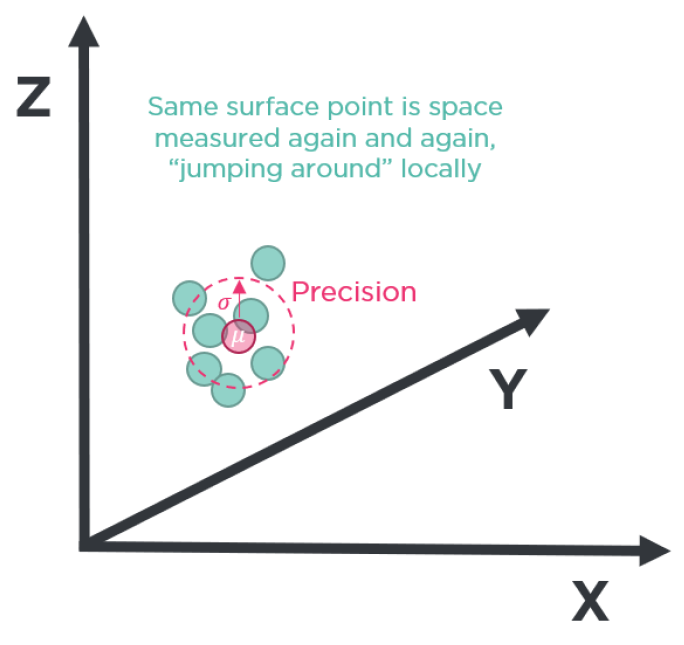
The tighter the cluster of repeated measurements, the higher the point precision.
Key insight: Point precision and spatial resolution together govern the ability to detect small objects, edges, fine geometric transitions, and shallow features.
Local Planarity Precision
Definition: Local planarity precision is the 1σ Euclidean distance variation from a plane for a set of points within a small local region.
It is defined as the average standard deviation of all individual local standard deviations across the entire field of view. An individual local standard deviation is found by measuring the orthogonal distance from a fitted plane of all points within a small local region. For example, a 50 × 50 pixel patch.
Explanation: Where point precision describes how much a single point varies between captures, local planarity precision describes how flat a small patch of a flat surface looks in a single capture. It captures the local surface roughness in the point cloud. The high-frequency XYZ variation between neighboring points on something that should be smooth.
Why it matters
Local planarity precision sets the practical limit for surface-quality inspection and shallow-feature detection. A camera with low local planarity precision shows ripples or noise on surfaces that are physically flat, which can hide real defects or create false ones.
Trueness
Trueness is the systematic deviation between the measured 3D data and the true physical geometry. It captures errors in size, shape, position, and orientation. Zivid uses two trueness specs to describe different aspects of this systematic error.
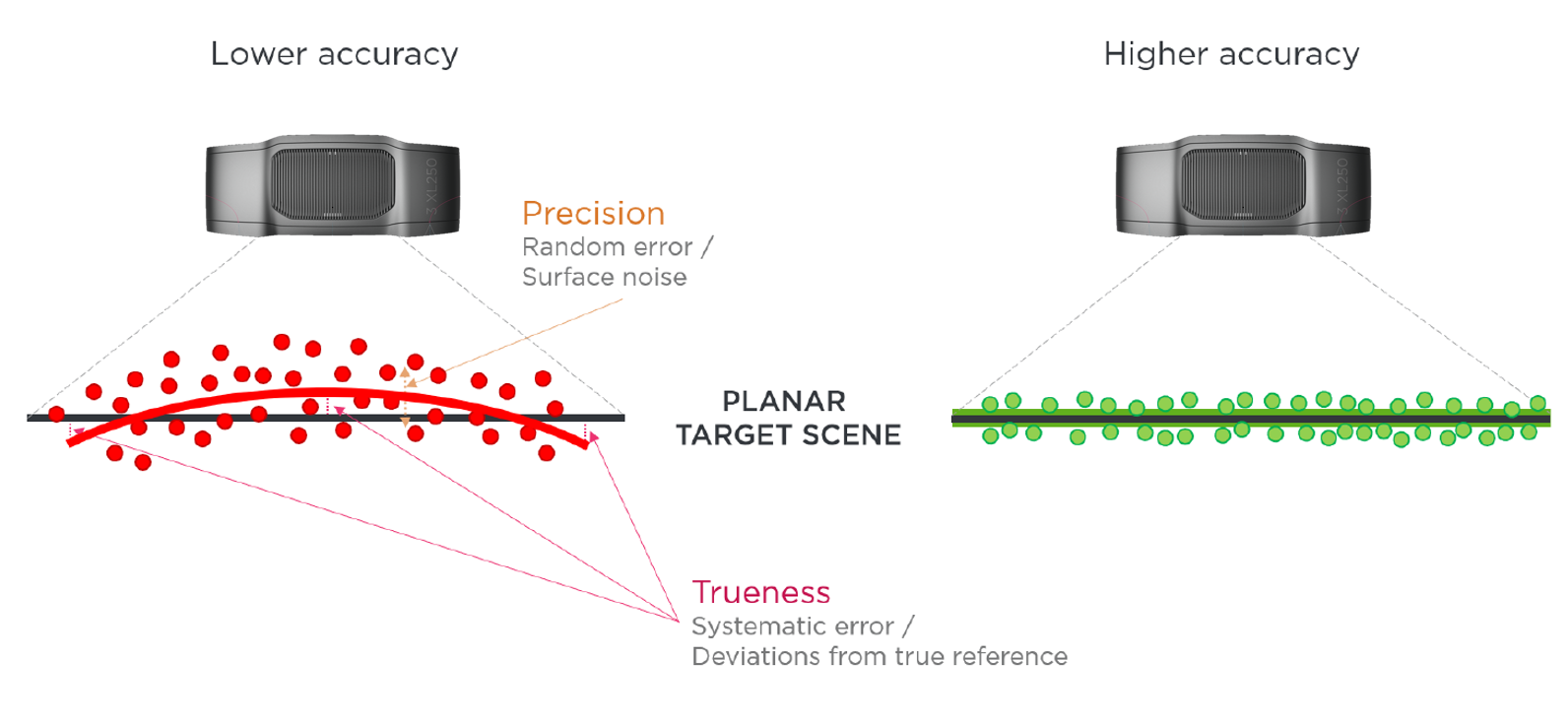
Precision describes the local spread of measurements; trueness describes the offset from the true value.
Global Planarity Trueness Error
Definition: Global planarity trueness error is the average deviation from a plane across the field of view.
It is found by measuring the distance of all individual points in the point cloud from a flat reference surface. It can also be interpreted as the flatness of a captured plane.
Explanation: A perfectly flat physical surface should appear perfectly flat in the point cloud. Global planarity trueness error captures how much it bends, bows, or warps in the measurement. A low-frequency, large-scale distortion that affects how the geometry is reproduced.
Why it matters
It directly affects applications such as bin-picking from a flat tote, pallet detection, and any task that relies on the measured geometry of large objects.
Dimension Trueness Error
Definition: Dimension trueness error is the 70th-percentile dimension error in the field of view.
It is found by measuring the error of multiple calibrated reference distances in the point cloud. A reference distance can range from 5 to 50 cm. The calibrated reference object is measured repeatedly across the entire field of view and operating distance, and during exposure to thermal and mechanical stress such as temperature change, vibration, and shock.
Explanation: Dimension trueness error expresses scaling correctness as a percentage of object size. If a camera has a dimension trueness error of 0.2 %, then:
a 200 mm true dimension may be measured as 199.6 mm or 200.4 mm
the ±0.4 mm difference reflects systematic bias, even if point precision is high
Examples:
0.2 % of 100 mm → ±0.2 mm
0.2 % of 300 mm → ±0.6 mm
Why it matters
low trueness error → reliable grasping, placement, and manipulation of objects in the physical world
high trueness error → incorrect object poses. I can see it but not pick it
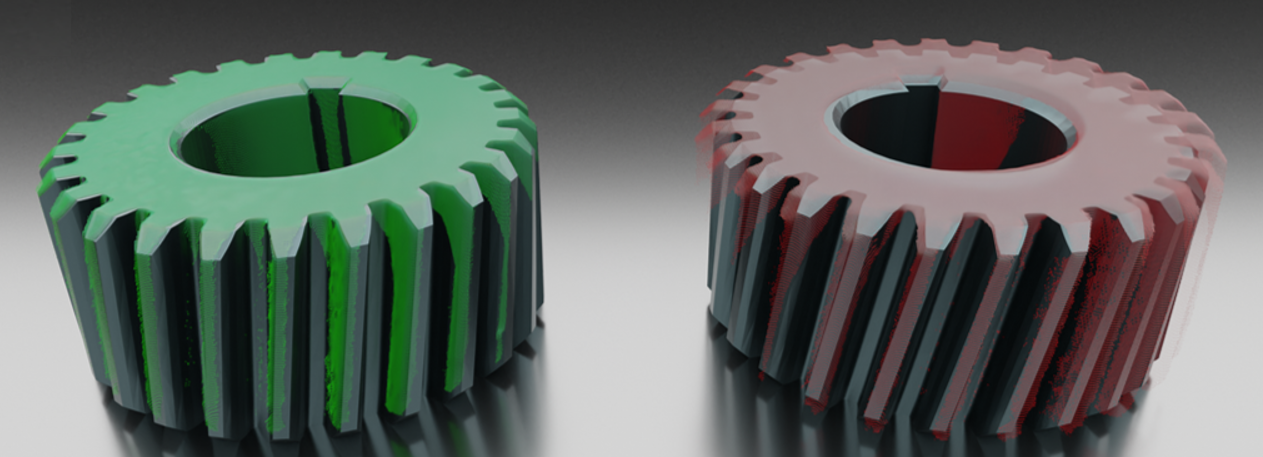
Green = accurate geometry; red = distorted geometry caused by a systematic dimension trueness error.
Accuracy
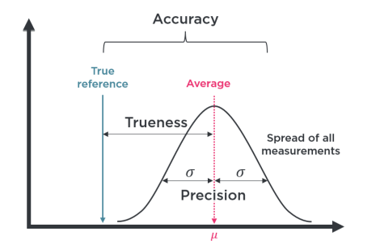
Definition: Accuracy is the total measurement error and is composed of a precision component and a trueness component.
Explanation:
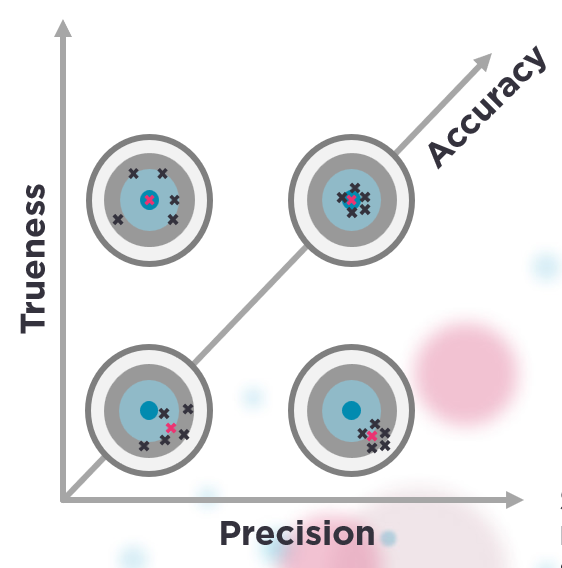
High precision + high trueness: This is high accuracy. (1)
High precision + low trueness: Measurements are consistent but systematically wrong → clean point cloud, wrong pose or dimensions. (2)
Low precision + high trueness: The average lands correctly, but individual shots are noisy → Noisy point cloud results in few detections, but if detected, the pose estimation is correct.
Low precision + low trueness: Neither consistent nor correct.
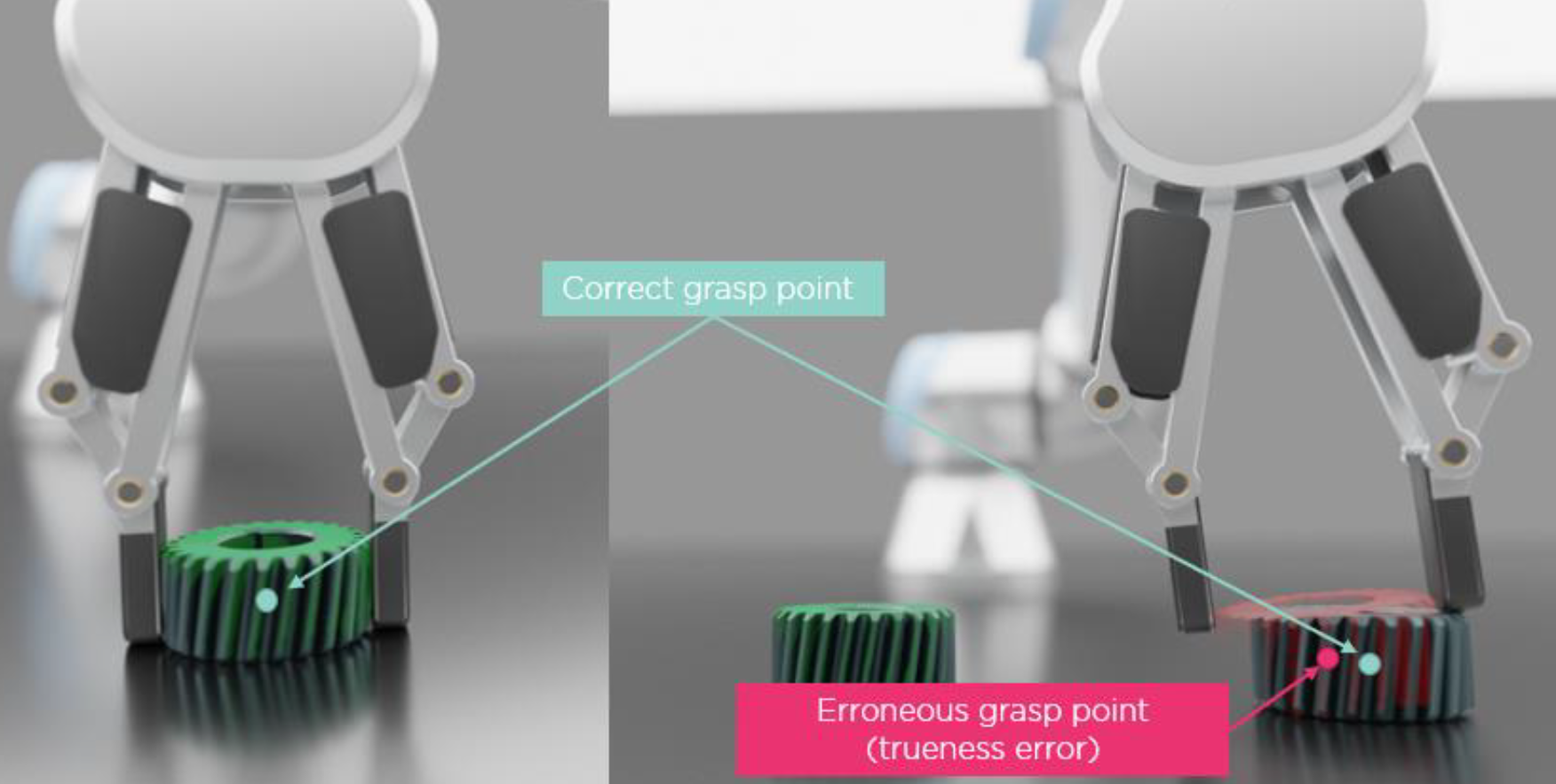
(1) Left = good pick; (2) right = mispick due to low trueness.
High accuracy is the goal of any 3D measurement system and requires both high point precision and high trueness. A camera that is precise but not true gives consistent but wrong answers. A camera that is true but not precise gives noisy answers that happen to average to the right place.