Hand-Eye Calibration Object
The hand-eye calibration process requires using an object of known geometry that can be detected and localized from the camera image.
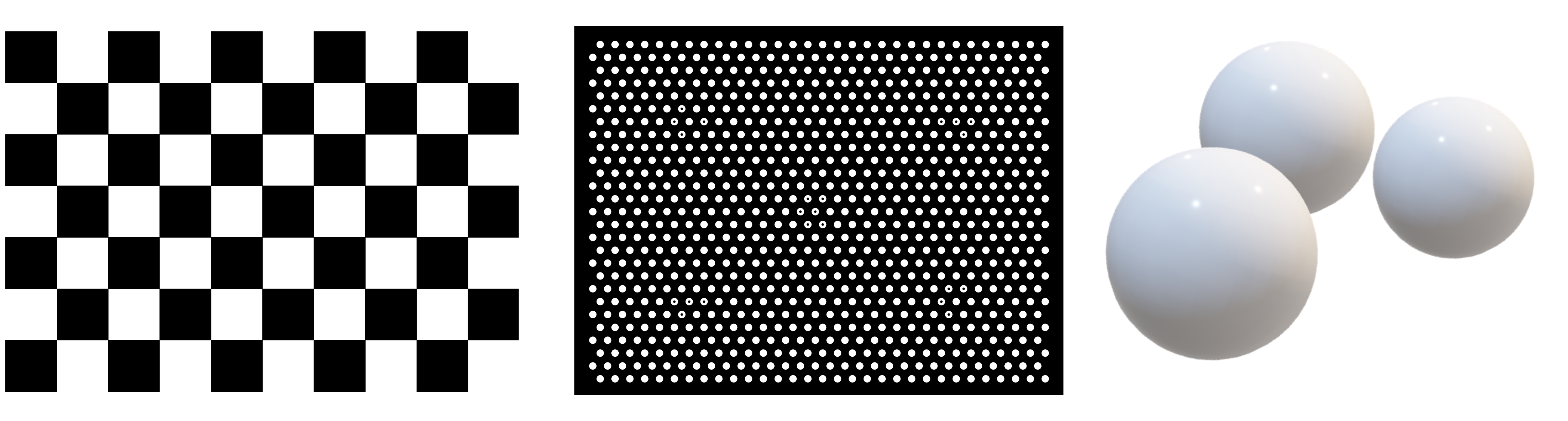
2D calibration objects
2D patterns are most commonly used as calibration objects. OpenCV libraries use a checkerboard, while HALCON software uses a dot pattern.
3D calibration objects
Having a 3D camera enables using a 3D calibration object. An example is the asymmetrical object used in Halcon software that is straightforward for 3D printing (see image above).
However, the key for good hand-eye calibration is in utilizing 3D features of a calibration object and that can also be achieved by using a checkerboard as a 3D calibration object. For example, Zivid Hand-Eye Calibration software uses a checkerboard pattern as a calibration object, but it utilizes the 3D features.

Continue reading about Hand-Eye Calibration Process.