多步标定
将所有相机都相对于一个主相机进行标定,是最快的标定方法。即所有相机都能同时检测到标定对象。但是,对于多台相机仍需要多个标定步骤。
多个步骤的意思是必须重新定位标定板以使其在所有相机视野内均可见。 考虑以下情况,三个相机彼此相差120度角呈圆形分布安装。
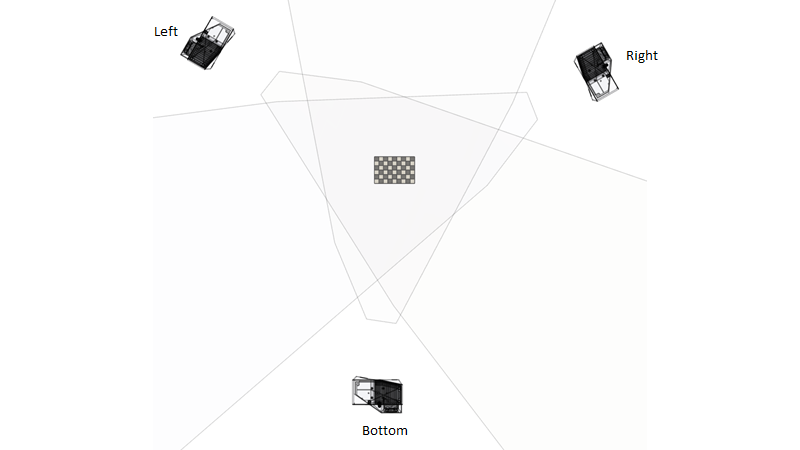
目的是找到一个从左侧(Left)相机到底部(Bottom)相机,以及从右侧(Right)相机到底部(Bottom)相机的变换矩阵。 因此如下所示,我们有两个标定设置。
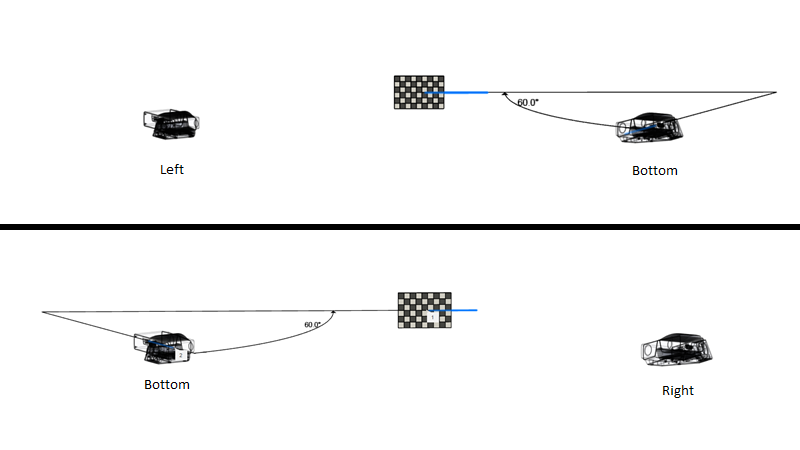
下面是一张俯视图以正确地显示角度。
在这种情况下,我们可以在没有任何性能损失的情况下进行多步标定。 这是因为,在每个步骤中均会生成一个变换矩阵。 每个变换矩阵都转换到底部(Bottom)相机的坐标系。
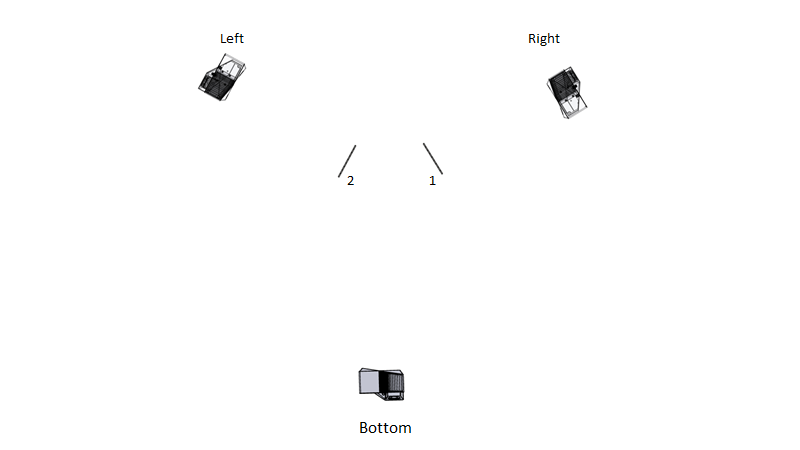
第一步涉及左侧(Left )相机,底部(Bottom )相机和标定对象1。
第二步涉及右侧(Right )相机,底部(Bottom )相机和标定对象2。