Color Balance
This tutorial shows how to balance the color of a 2D image by taking images of a white surface (a piece of paper, wall, or similar) in a loop.

First, we connect to the camera.
Then we automatically configure 2D acquisition settings by taking images in a loop while tuning gain, exposure time, and aperture. The goal is for the maximum of mean RGB values to reach the value within defined limits.
We then capture an image and display it.
Then we run the calibration algorithm, which balances the color of RGB image by taking images of a white surface (a piece of paper, wall, or similar) in a loop.
The complete implementation of the algorithm is given below.

def _color_balance_calibration(camera, settings_2d):
"""Balance color for RGB image by taking images of white surface (piece of paper, wall, etc.) in a loop.
Args:
camera: Zivid camera
settings_2d: 2D capture settings
Returns:
corrected_red_balance: Corrected red balance
corrected_green_balance: Corrected green balance
corrected_blue_balance: Corrected blue balance
"""
print("Starting color balance calibration")
corrected_red_balance = 1.0
corrected_green_balance = 1.0
corrected_blue_balance = 1.0
saturated = False
while True:
settings_2d.processing.color.balance.red = corrected_red_balance
settings_2d.processing.color.balance.green = corrected_green_balance
settings_2d.processing.color.balance.blue = corrected_blue_balance
rgba = camera.capture(settings_2d).image_rgba().copy_data()
mean_color = _compute_mean_rgb(rgba[:, :, 0:3], 100)
print(" Mean color values:")
print(f" R: {int(mean_color.red)}")
print(f" G: {int(mean_color.green)}")
print(f" B: {int(mean_color.blue)}")
if int(mean_color.green) == int(mean_color.red) and int(mean_color.green) == int(mean_color.blue):
print("Color balance successful")
break
if saturated is True:
print("Color balance incomplete - the range limits of color balance parameters have been reached")
break
max_color = max(mean_color.red, mean_color.green, mean_color.blue)
corrected_red_balance = np.clip(settings_2d.processing.color.balance.red * max_color / mean_color.red, 1, 8)
corrected_green_balance = np.clip(
settings_2d.processing.color.balance.green * max_color / mean_color.green, 1, 8
)
corrected_blue_balance = np.clip(settings_2d.processing.color.balance.blue * max_color / mean_color.blue, 1, 8)
corrected_values = [corrected_red_balance, corrected_green_balance, corrected_blue_balance]
if 1.0 in corrected_values or 8.0 in corrected_values:
saturated = True
print("Color balance:")
print(f" Red: {corrected_red_balance}")
print(f" Green: {corrected_green_balance}")
print(f" Blue: {corrected_blue_balance}")
return (corrected_red_balance, corrected_green_balance, corrected_blue_balance)
Lastly, we apply the color balance settings, capture a new image and display it.
settings_2d.processing.color.balance.red = red_balance
settings_2d.processing.color.balance.green = green_balance
settings_2d.processing.color.balance.blue = blue_balance
rgba_balanced = camera.capture(settings_2d).image_rgba().copy_data()
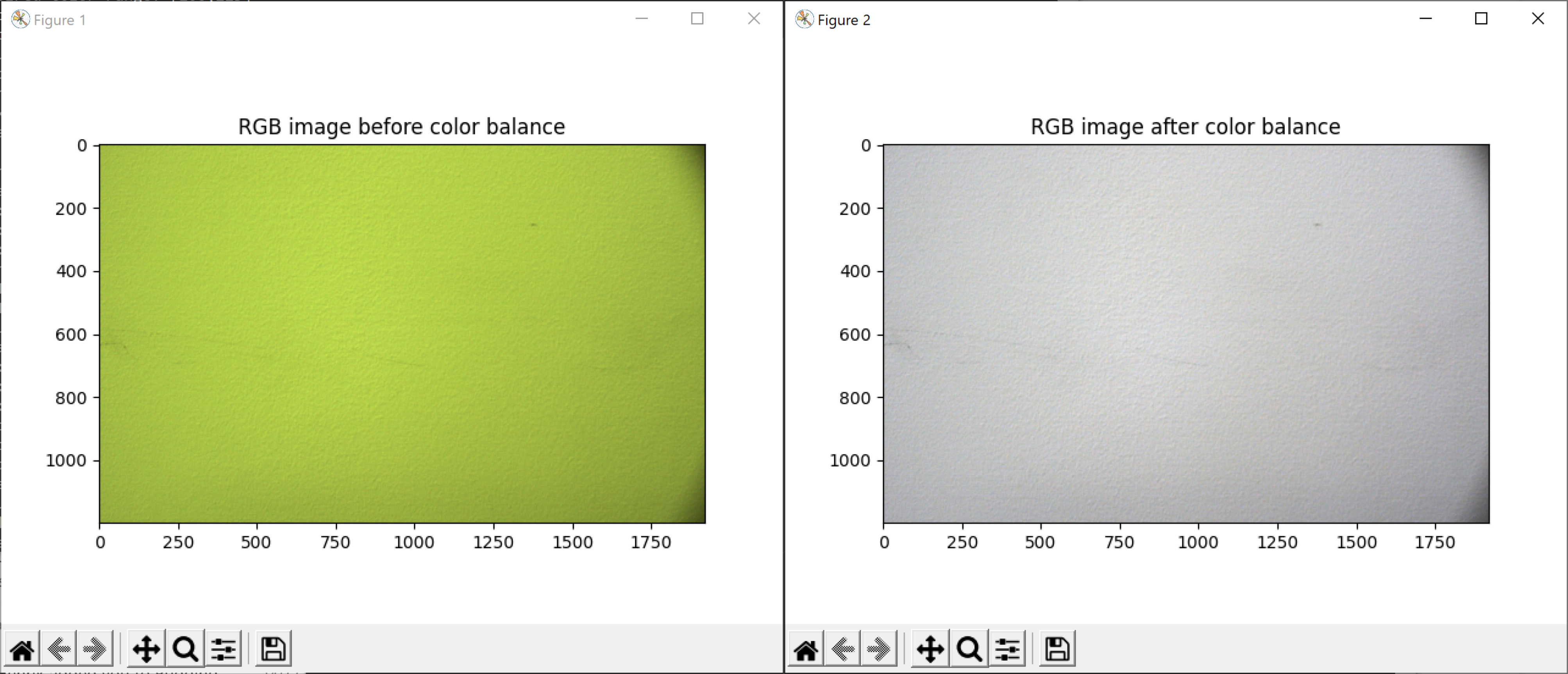
_display_rgb(rgba_balanced[:, :, 0:3], "RGB image after color balance")
The figure below shows the color image before and after applying color balance.