手臂安装
所有型号的Zivid 3D相机都可以安装在机器人上。其中,Zivid Two特别适合手臂安装,因为它体积小、重量轻、捕获速度快和特殊设计的视野。
Zivid手臂安装支架
Zivid On-Arm Mount 是用于将Zivid相机安装到工业和协作机器人上的支架。它与Zivid One+和Zivid Two相机均兼容。
为什么使用Zivid手臂安装支架解决方案?
轻质
Zivid手臂安装支架重量轻,对机器人手臂的承载能力影响较小,这对于协作机器人和更微型的工业机器人尤其重要。这意味着可以应用更重的工具和夹具,并从系统中获得尽可能多的有效载荷。
模块化
一个相机座适合所有的相机型号,无需完全拆卸即可更换相机。
集成电缆管理
Zivid手臂安装支架在相机端有一个应力消除装置,可在电缆缠结的情况下保护连接器。它可以安装在相机的背面或任一侧,以适应各种独特的安装场景。
遮挡预防
相机座可以选择平面或15度倾斜两种不同的安装方式,适用于可能遮挡相机视野的大型夹具。
高灵活性和碰撞预防
Zivid手臂安装支架外形小巧,可降低与其他物体碰撞的风险,并为抓手和机械臂提供良好的间隙。延长器和灵活的配置允许多种安装姿态,例如,相机座可以以两种方式定向。这样的设置使相机能够远离大型夹具,并为具有挑战性的机器人运动获得空间,从而防止自碰撞。向后倾斜安装的相机座会使相机看起来更靠近抓手,从而可能减少所需的机器人运动。
适应性
由于它有多种变体,Zivid手臂安装支架支持多种型号的机器人。此外,其模块化设计允许轻松定制适配器以适应更多机器人型号。


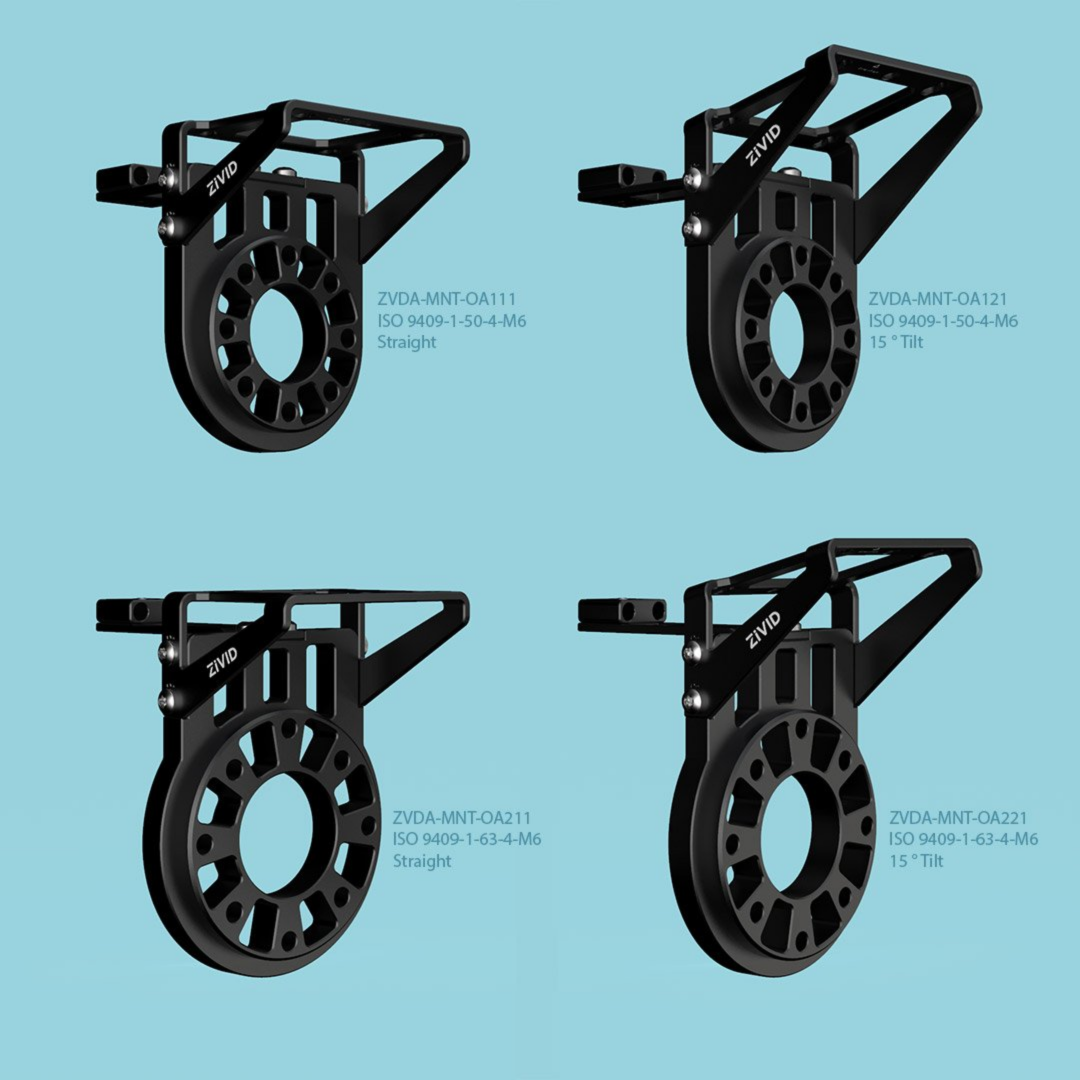
Zivid手臂安装支架的变体
Zivid手臂安装支架有四种变体:
- ZVDA-MNT-OA111
直型相机座
法兰适配器兼容ISO 9409-1-50-4-M6(UR, Omron, Doosan, ++)
- ZVDA-MNT-OA121
15度倾斜安装发热相机座(建议在使用会造成遮挡的夹具时使用)
法兰适配器兼容ISO 9409-1-50-4-M6(UR, Omron, Doosan, ++)。
- ZVDA-MNT-OA211
直型相机座
的法兰适配器兼容ISO 9409-1-63-4-M6(Yaskawa, Kawasaki, ++)
- ZVDA-MNT-OA221
15度倾斜安装发热相机座(建议在使用会造成遮挡的夹具时使用)
的法兰适配器兼容ISO 9409-1-63-4-M6(Yaskawa, Kawasaki, ++)
规格书和用户指南的PDF文档及CAD文件可 从 Accessories Downloads 下载。
Zivid手臂安装支架延长器
Zivid On-Arm Mount Extender 是增加安装灵活性的单独(选件)产品。
Zivid臂安装支架延长器的变体
延长器有两种变体:
- ZVDA-MNT-OA01E
与ISO9409-1-50-4-M6法兰兼容(UR, Omron, Doosan, ++)
- ZVDA-MNT-OA02E
与ISO9409-1-63-4-M6法兰兼容(Yaskawa, Kawasaki, ++)
规格书可 从 Accessories Downloads 下载。
安装说明
在包装盒中,您会找到一个相机座、用于电缆管理的应力消除装置、一个机器人法兰适配器和安装螺钉。
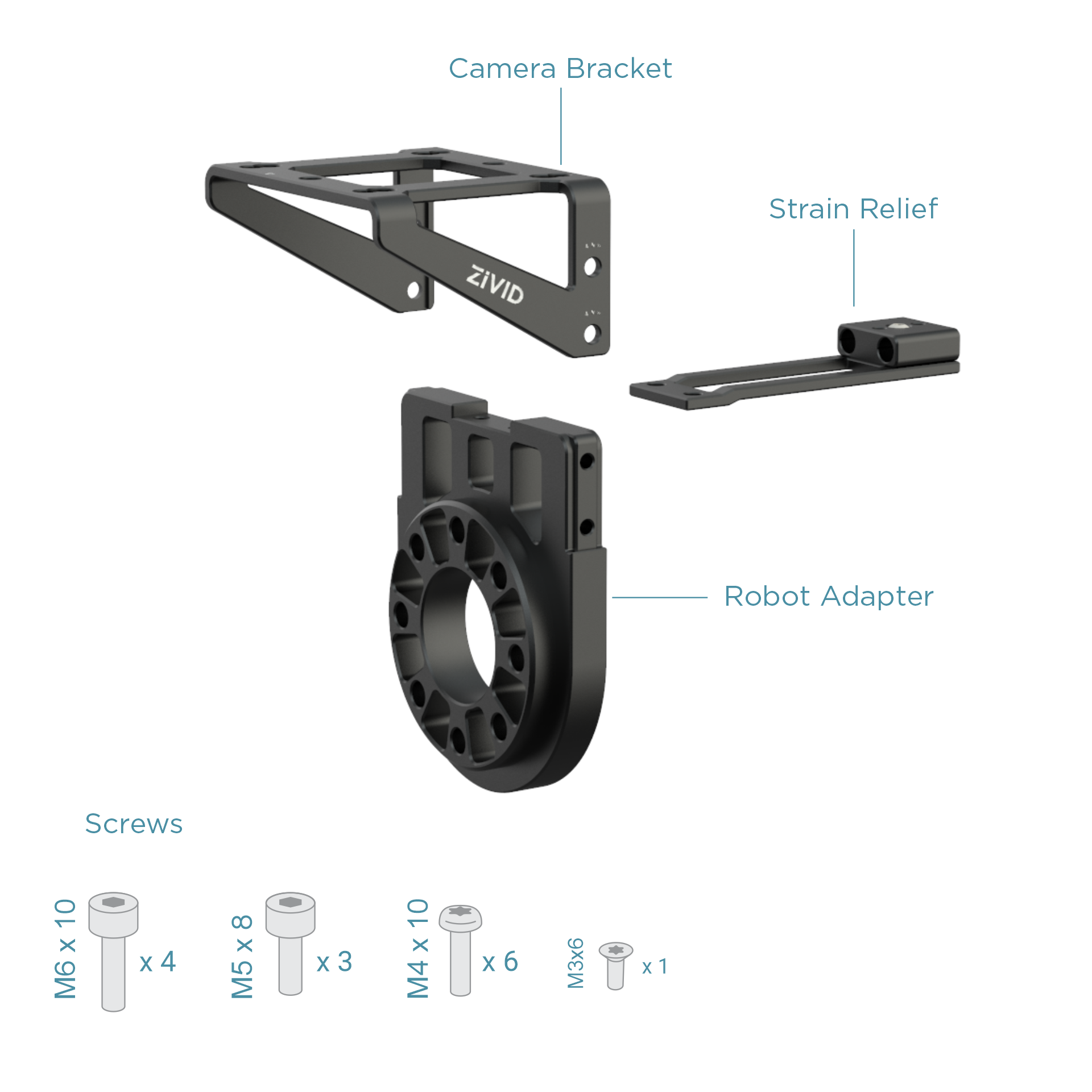
安装需要以下工具:
20、25和30尺寸的星型螺丝刀

机器人适配器和延长器
可选的延长器可以安装在机器人适配器的后面或前面。将其安装在前面,可使相机与夹具保持更长的距离,从而最大限度地减少在拾取过程中与例如料箱边缘发生碰撞的风险。在机器人适配器后面安装延长器适用于降低某些机器人发生机器人自碰撞的风险,并且还提供了良好的电缆管理选项。
无论您将哪个安装组件固定到机器人法兰上,在使用四个螺钉安装之前,请查看相应的机器人文档以了解推荐的螺钉类型和扭矩值。我们建议使用不锈钢(A2 或 A4)螺丝。延长器配有不锈钢安装螺钉。但是,手臂安装支架与机器人之前的连接不提供安装螺钉。
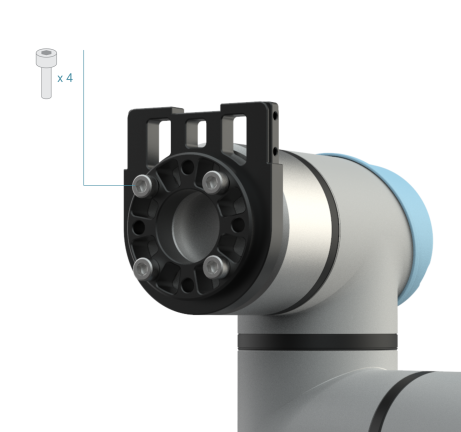
查看机器人文档以了解螺钉应拧入机器人法兰的深度。使用机器人适配器时会额外增加了12.5mm长度。通常大约5mm的螺钉深度是合适的。
为了增加灵活性,可以添加更多延长器。但是,请注意机器人的承载能力,不要低估偏离中心的有效载荷产生的惯性力。
定位销
我们建议使用具有h公差的定位销将手臂安装支架与机器人法兰固定在一起。
警告
不要使用m公差定位销,他们会被卡住。
如果在机器人适配器后面安装延长器,请使用Ø6 mm的定位销将延长器与机器人法兰连接。定位销应插入延长器6mm深。查看机器人文档,了解定位销应插入机器人法兰的深度。10毫米长的定位销通常是合适的。
如果在机器人适配器前面安装延长器,定位销必须长20-22cm,因为它需要穿过延长器。
如果不使用延长器,定位销应插入机器人适配器5mm深。
小技巧
锁紧的定位销可以确保在重新组装底座时具有良好的重复装配精度,并且即使受到相当大的物理撞击,相邻组件也不会随着时间的推移而移动。
应力消除
如下图所示安装应力消除装置。
备注
应力消除器也可以向前安装,电缆夹指向夹具。

小技巧
如果电缆被缠结,应力消除装置可保护相机连接器,最大限度地减少由于直接施加在电缆连接器上的力导致的物理损坏的风险。应力消除组件将有助于将来自缠绕电缆的不需要的力引导到机器人手臂,使其有机会停止运动。除了应力消除外,还应使用适当的电缆管理系统,例如, Igus Cable Management Solutions。
相机座
安装相机座。

备注
由于相机安装支架是对称的,因此也可以向后安装(相机座上的箭头指向后)。这在夹具和相机之间留下了更多空间。
通过将相机座滑到机器人适配器的导轨上来安装相机。

小技巧
为了增加安全性以防止螺丝松动,我们建议使用Loctite(紫色或蓝色)胶水和Nordlock垫圈。常规平垫圈无法应对振动,但有助于确保螺钉进入特定组件的正确深度。
电缆
连接电缆并引导它们穿过应力消除装置。电缆夹被设计为用于5-7毫米直径的电缆。

备注
Zivid手臂安装支架上的应力消除装置被设计为适合Zivid电源和数据电缆一起使用。我们的底座也可以使用较粗的第三方或定制电缆,但是无法使用电缆夹,而只能使用电缆扎带将电缆固定到我们的应力消除装置上。
警告
请记住,我们不建议使用Zivid提供的电缆以外的任何电缆。
相机和应力消除器之间的电缆不应该紧绷,以避免由于连接器上的持续静态弯曲和扭曲力的影响,随着时间的推移导致连接器损坏。使用Zivid手臂安装支架时,我们建议在相机和应力消除组件之间留出20-30cm长度的电缆。使从相机引出的电缆在进入应力消除组件之前应形成一个弯曲的环形。
另一种方式是通过Zivid安装支架延长器的侧面开口来整理电缆。在这种情况下,请在相机和应力消除组件之间留出30-40cm长度的电缆。
小技巧
使用90度角连接器 的 Power and Ethernet cables 非常适合配合Zivid手臂安装支架使用。由于电缆朝下伸出且占用空间很小,因此使用90度连接器比使用直型连接器更安全,因为它降低了电缆缠结的风险。
备注
可以使用Zivid手臂安装支架上的应力消除装置,以及向前或向后安装的直或成角度的相机座。但是,如果向后安装相机座,您将无法接触到电缆夹上的螺钉。或者,您可以将应力消除组件安装在Zivid手臂安装支架的侧面。
我们建议在PC端也采用某种形式的应力消除装置,以防止连接器或端口损坏。
如需了解关于碰撞防护的内容,请查看 Zivid Two防护罩。
阅读 手臂安装方案的机械注意事项 以确保您在购买或设计、集成和安装用于手臂安装方式的配件和设备方面做出正确的决定。
继续阅读有关 三脚架安装 的文章。