Gain
Introduction
Gain is a parameter that lets the user configure the pre-amplification of the read-out circuit in the imaging sensor pixels. In photography, it is commonly referred to as ISO. Increasing the gain increases the pre-amplification of the sensor which will increase its sensitivity to light and thus result in brighter images.
Using Gain
The gain is beneficial for increasing the dynamic range in a scene when using HDR acquisitions if minimal time penalty is desired. It is also good for getting point clouds of very dark regions. However, high gain has a considerable drawback in the sense that it amplifies everything that the sensor measures. This includes noise, which in turn has some penalty on the single-acquisition dynamic range, and reduces the peak signal to noise ratio. It is therefore recommended to keep gain low, if optimal, low-noise 3D point clouds are desired.
Warning
Higher gain values increase noise in the point cloud.
Sometimes it is better to get noisy points, than no points. Consider a scenario with a strict time budget, and dark objects. In order to extract information from dark regions with low time penalty, gain is a good parameter to utilize.
Note
Gain can be an effective tool to extract data from very dark regions in the scene.
The table below shows how the available gain in Zivid 3D cameras relates to stops.
Gain |
1x |
2x |
4x |
8x |
16x |
Stops |
0 |
+1 |
+2 |
+3 |
+4 |
dB |
-6 |
0 |
6 |
12 |
18 |
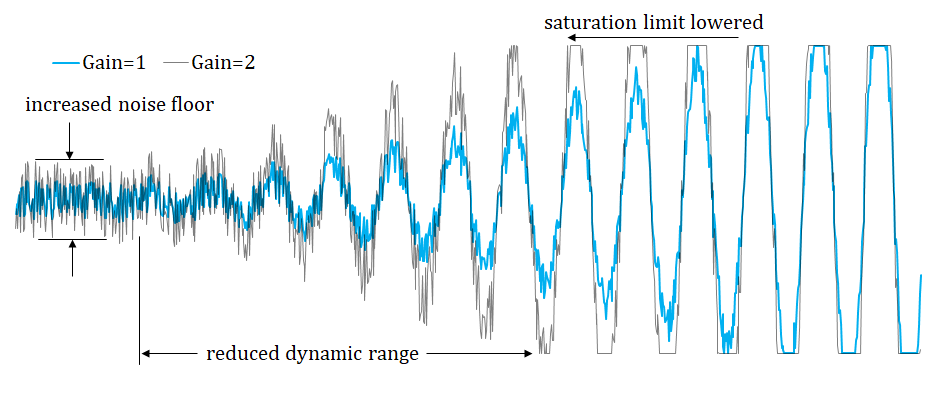
The image below illustrates the impacts of gain on the dynamic range of the frame. The blue line illustrates the measured signal with gain=1 and the black line shows the same measured signal with gain=2.
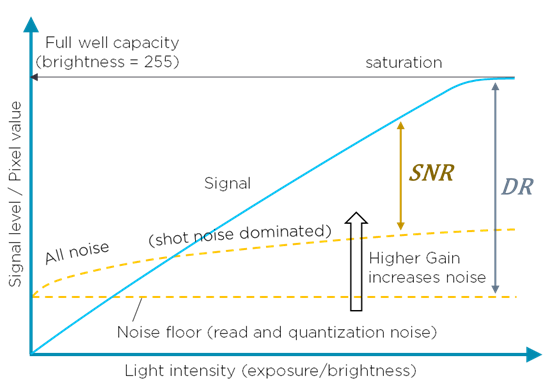
The image below illustrates the measured signal level versus light intensity.
Impact of Gain in the point cloud
Higher gain values will increase noise. This will result in lower precision when compared to an equally exposed acquisition where the gain has been traded for e.g. exposure time. This reduction in precision will show itself both as increased noise between captures, as well as increased noise from pixel to pixel.
However, when capturing HDR acquisitions with similar exposure, the noise will be over-sampled and thus effectively averaged. For this reason, it can be possible to maintain the same precision using multiple acquisitions with high gain compared to a single acquisition with high exposure time.
Capturing multiple acquisitions with similar exposure will suppress noise.