Vision Engine(视觉引擎)
介绍
The Vision Engine is the backbone of the point cloud computation. It controls the pattern projecting, imaging, and processing of the images of the projected pattern to generate the final 3D point cloud.
Some challenging scenes, e.g. shiny metal objects susceptible to interreflections, might require different processing to acquire a good point cloud compared to general scenes, e.g. consumer goods. Using the right Vision Engine is necessary for getting the most out of the camera for each specific scene.
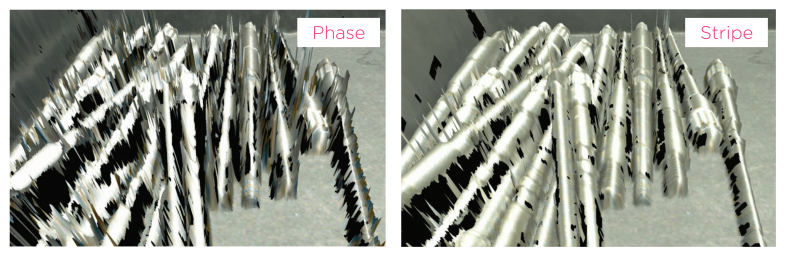
Phase Engine
Phase Engine 是 默认 的Zivid Vision Engine。它非常 快 并能提供良好的点云,是一个兼顾质量与速度方案。推荐在拍摄 消费品 等一般场景的时候使用Phase Engine。它适用于捕获 漫反射 和 中等镜面反射 物体的图像。这包括了 哑光和吸收性材料,例如 橡胶、布、塑料、纸板、木材 等,以及 具有粗糙和拉丝表面的金属物体。Phase Engine适用于 单品拣选 和 物流 等应用。

由于图案模糊,Phase Engine不太容易出错。与其他视觉引擎相比,这使得它在远离相机焦点的地方工作得更好。
小技巧
Phase Engine是一个兼顾质量和速度的良好方案。
相机型号 |
投影次数 |
|---|---|
One+ |
12 |
Two |
13 |
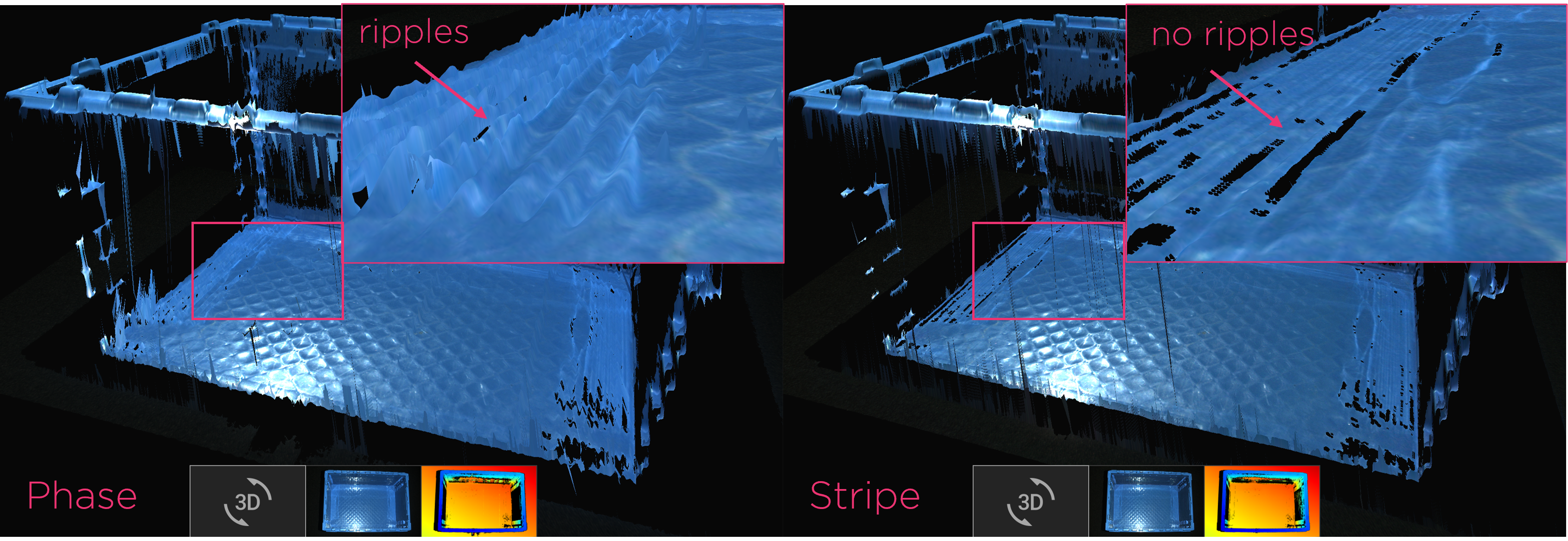
Stripe Engine
Stripe Engine 是专为在具有 非常镜面反射物体 的场景提供卓越的点云质量而构建的视觉引擎。它可以抑制反射间伪像并提高 反光物体 (如 金属圆柱体 和 镀铬部件)的数据质量。与Phase Engine相比,它具有 更高的动态范围,这使得它对以下问题不那么敏感:
高光
光晕效果
由以下原因导致的数据损坏:
来自环境光源的反射。
投影仪的直接反射。
当相机直接朝向向料箱和其他物体拍照时,会减少不良影响。
Stripe Engine还 对 由环境光源的干扰 产生的 噪声不太敏感,从而减少了使用50Hz/60Hz曝光时间进行补偿的需要。
建议在包含大量 镜面反射物体,环境光源产生的噪声,料箱侧壁会产生反射的 料箱抓取 的场景中使用Stripe Engine。
小技巧
Stripe Engine以捕获速度为代价提供卓越的点云质量。
备注
使用Stripe Engine时,必须启用反射移除过滤器和对比度失真过滤器。
Stripe Engine目前处于试验阶段,未来可能会进行更改和改进。
相机型号 |
投影次数 |
|---|---|
One+ |
32 |
Two |
33 |
进一步阅读
要了解有关 Zivid 相机设置的更多信息,请继续查阅 Exposure Time(曝光时间)。
版本历史
SDK |
变更 |
|---|---|
2.6.0 |
使用NVIDIA GPU时Stripe engine的性能提高了5%到15%。与 2.5相比,使用快速CPU和慢速GPU(例如Intel集成GPU)将具有大致相同或稍差的性能(1%到5%)。 |
2.5.0 |
Stripe engine性能提高了 2% 到 10%。 |
2.4.0 |
为 Zivid Two添加了Stripe engine的支持。 |
2.3.0 |
提高了Stripe engine的速度,每次采集大约100毫秒。 |
2.2.0 |
添加了Stripe Vision AP。原始和默认的视觉引擎被命名为Phase。 |